永磁力矩电机和具有它的机器人的制作方法
本发明涉及电机,具体而言,涉及一种永磁力矩电机和具有它的机器人。
背景技术:
1、相关技术中,调制电机的定子普遍采用分裂齿结构,由于这种定子结构磁路极易饱和,因而定子轭与定子齿设计的很厚,电机的体积和重量普遍偏大,限制了电机转矩密度的提高。同时为了提高极比,采用分布式绕组,磁路长且绕组端部很高,进一步增大了电机的体积和重量。
技术实现思路
1、本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。为此,本发明提出一种永磁力矩电机,可提高转矩密度。
2、本发明还提出了一种具有上述永磁力矩电机的机器人。
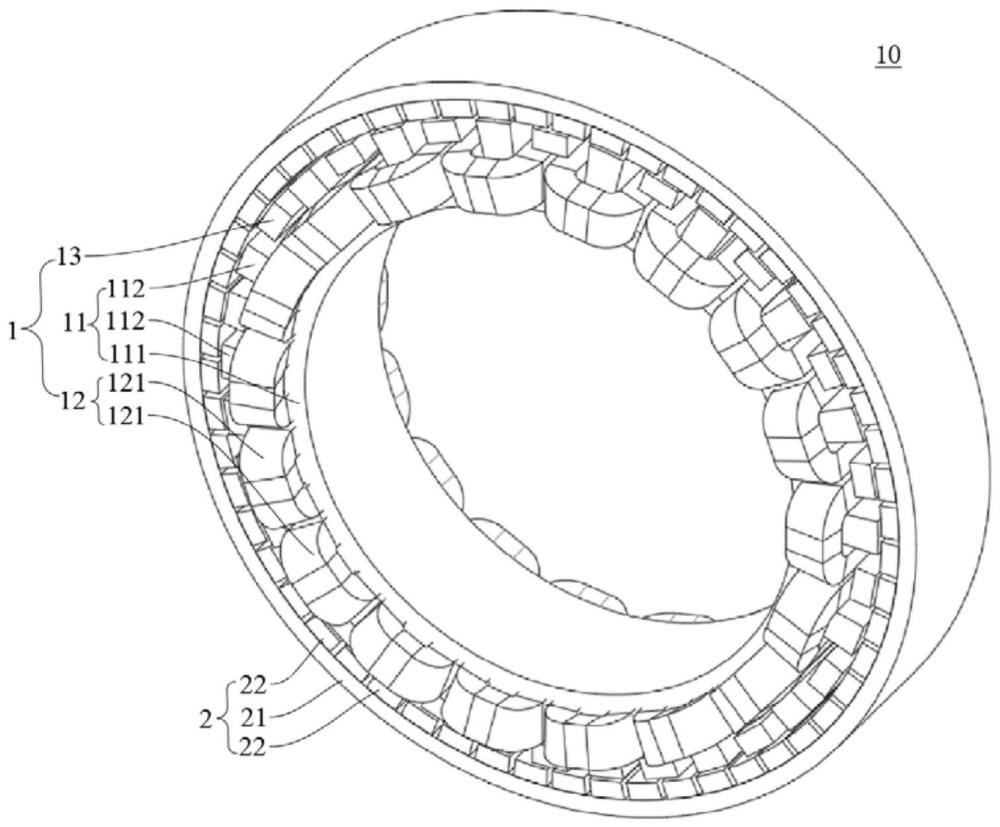
3、根据本发明实施例的永磁力矩电机,包括:定子组件,所述定子组件包括定子铁芯、定子绕组和多个磁场调制模块,所述定子铁芯包括定子轭和沿所述定子轭周向方向间隔设置的多个定子齿,相邻的两个所述定子齿之间形成开口的定子槽,所述定子绕组绕设于所述定子齿,每个所述定子槽内均设有磁场调制模块;转子组件,所述转子组件同轴套设于所述定子组件的径向外侧;其中,所述定子组件的极对数ps满足关系式:ps=(z-2)/2,所述转子组件的极对数pr满足关系式:pr=2z±ps,z为所述定子槽的数量。
4、根据本发明实施例的永磁力矩电机,相邻的两个定子齿之间形成开口的定子槽,每个定子槽内均设有磁场调制模块,磁场调制模块可利用磁障效应减弱磁路饱和,从而有利于减少定子齿和定子轭的尺寸,同时利用调制效应可提升有效气隙磁密幅值,极大地减小了永磁力矩电机的重量,进而有利于提高永磁力矩电机的转矩密度。
5、根据本发明的一些实施例,所述定子槽的数量z、所述定子齿的数量z1和所述磁场调制模块的数量z2满足关系式:z=z1=z2。
6、根据本发明的一些实施例,所述转子组件包括转子铁芯和多个永磁体,所述转子铁芯同轴套设于所述定子组件的径向外侧,每个所述永磁体均与所述转子铁芯朝向所述定子组件的内侧壁连接。
7、进一步地,所述磁场调制模块在所述定子铁芯的径向方向上的厚度t满足关系式:1mm≤t≤3mm;所述磁场调制模块的中心点和与其相邻的所述定子齿的中心点在所述定子铁芯的周向方向上对应的圆心角α满足关系式:2deg≤α≤5deg;所述磁场调制模块在所述定子铁芯的周向方向上的两端对应的圆心角β满足关系式:6deg≤β≤8deg。
8、根据本发明的一些实施例,所述定子铁芯的径向方向上,所述磁场调制模块位于所述定子绕组和所述转子组件之间,且所述磁场调制模块不高于所述定子齿。
9、根据本发明的一些实施例,所述定子绕组为集中式绕组。
10、根据本发明的一些实施例,所述定子铁芯和所述磁场调制模块均为铁钴合金材料。
11、根据本发明的一些实施例,所述永磁体为钕铁硼材料。
12、根据本发明另一方面实施例的机器人,包括上述的永磁力矩电机。
13、根据本发明实施例的机器人,永磁力矩电机可用于对机器人提供动力,永磁力矩电机的相邻的两个定子齿之间形成开口的定子槽,每个定子槽内均设有磁场调制模块,磁场调制模块可利用磁障效应减弱磁路饱和,以减少定子齿和定子轭的尺寸,同时利用调制效应可提升有效气隙磁密幅值,以提高永磁力矩电机的转矩密度,永磁力矩电机的体积小,在机器人内布置方便。
14、根据本发明的一些实施例,所述永磁力矩电机用于驱动所述机器人的关节转动。
15、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种永磁力矩电机,其特征在于,包括:
2.根据权利要求1所述的永磁力矩电机,其特征在于,所述定子槽的数量z、所述定子齿的数量z1和所述磁场调制模块的数量z2满足关系式:z=z1=z2。
3.根据权利要求1所述的永磁力矩电机,其特征在于,所述转子组件包括转子铁芯和多个永磁体,所述转子铁芯同轴套设于所述定子组件的径向外侧,每个所述永磁体均与所述转子铁芯朝向所述定子组件的内侧壁连接。
4.根据权利要求1所述的永磁力矩电机,其特征在于,所述磁场调制模块在所述定子铁芯的径向方向上的厚度t满足关系式:1mm≤t≤3mm;
5.根据权利要求1所述的永磁力矩电机,其特征在于,在所述定子铁芯的径向方向上,所述磁场调制模块位于所述定子绕组和所述转子组件之间,且所述磁场调制模块不高于所述定子齿。
6.根据权利要求1所述的永磁力矩电机,其特征在于,所述定子绕组为集中式绕组。
7.根据权利要求1所述的永磁力矩电机,其特征在于,所述定子铁芯和所述磁场调制模块均为铁钴合金材料。
8.根据权利要求3所述的永磁力矩电机,其特征在于,所述永磁体为钕铁硼材料。
9.一种机器人,其特征在于,包括根据权利要求1-8中任一项所述的永磁力矩电机。
10.根据权利要求9所述的机器人,其特征在于,所述永磁力矩电机用于驱动所述机器人的关节转动。
技术总结
本发明公开了一种永磁力矩电机和具有它的机器人。该永磁力矩电机包括:定子组件和转子组件,定子组件包括定子铁芯、定子绕组和多个磁场调制模块,定子铁芯包括定子轭和沿定子轭周向方向间隔设置的多个定子齿,相邻的两个定子齿之间形成开口的定子槽,每个定子槽内均设有磁场调制模块,其中,定子组件的极对数Ps满足关系式:Ps=(Z‑2)/2,转子组件的极对数Pr满足关系式:Pr=2Z±Ps,Z为定子槽的数量,磁场调制模块可利用磁障效应减弱磁路饱和,从而有利于减少定子齿和定子轭的尺寸,同时利用调制效应可提升有效气隙磁密幅值,极大地减小了永磁力矩电机的重量,进而有利于提高永磁力矩电机的转矩密度。
技术研发人员:原野
受保护的技术使用者:北京星动纪元科技有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!