一种电机的自适应控制方法、系统及存储介质与流程
本发明涉及电机控制,具体涉及一种电机的自适应控制方法、系统及存储介质。
背景技术:
1、为满足对电机转速的定制化需求,需要满足不同的期望转速,然而相关技术中的电机控制方案,在给定电机的最期望转速的前提下,难以保证电机运行准确度的同时,实现电机效率的最大化。
技术实现思路
1、本发明目的在于提供一种电机的自适应控制方法、系统及存储介质,在保证电机运行准确度的同时,实现电机效率的最大化,从而做到兼顾电机控制的准确度和效率。
2、为了实现上述目的,本发明提供以下技术方案:
3、第一方面,本发明实施例提供了一种电机的自适应控制方法,所述方法包括以下步骤:
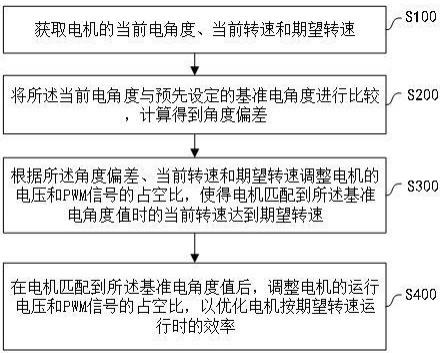
4、获取电机的当前电角度、当前转速和期望转速;
5、将所述当前电角度与预先设定的基准电角度进行比较,计算得到角度偏差;
6、根据所述角度偏差、当前转速和期望转速调整电机的电压和pwm信号的占空比,使得电机匹配到基准电角度值时的当前转速达到期望转速;
7、在电机匹配到所述基准电角度值后,调整电机的运行电压和pwm信号的占空比,以优化电机按期望转速运行时的效率;其中,电机的效率为电机的机械能输出功率和电能输入功率的比率。
8、可选地,所述根据所述角度偏差、当前转速和期望转速调整电机的电压和pwm信号的占空比,使得电机匹配到基准电角度值时的当前转速达到期望转速,包括:
9、根据所述期望转速确定电机的电压调整范围;
10、根据所述电机的当前转速确定所述电机的pwm信号的占空比最小调整值;其中,占空比最小调整值=(最大占空比-最小占空比)/(最大转速-最小转速);
11、根据所述角度偏差、所述电压调整范围和所述pwm信号的占空比调整范围,调整所述电机的电压和pwm信号的占空比,使得所述电机匹配到所述基准电角度值时的当前转速达到期望转速。
12、可选地,所述根据所述期望转速,确定电机的电压调整范围,包括:
13、获取期望转速、当前转速和优选效率,根据所述期望转速、当前转速和优选效率确定目标电压,使得所述电机按目标电压调整到期望转速时,达到优选效率;其中,目标电压=额定电压×(1+(期望转速-当前转速)/(1-优选效率));当前转速=额定转速×(1-当前效率);当前效率=当前转速*当前扭矩/当前电压*当前电流;
14、基于所述目标电压确定电压调整范围。
15、可选地,所述根据所述角度偏差、所述电压调整范围和所述pwm信号的占空比调整范围,调整所述电机的电压和pwm信号的占空比,使得所述电机匹配到所述基准电角度值时的当前转速达到期望转速,包括:
16、s331,获取角度偏差,将所述角度偏差作为基准偏差角;
17、s332,确定所述基准偏差角所在的角度偏差区间,基于预先设置的加速对应表确定所述角度偏差区间对应的加速值,将所述加速值对应的电压值作为需求电压值;其中,所述加速对应表包含多个角度偏差区间和多个加速值,多个角度偏差区间和多个加速值一一对应,多个所述加速值的大小随角度偏差区间的增加而增加;电机的转速从0开始按加速值运行一个周期时长的角度值在该加速值对应的角度偏差区间内;
18、s333,确定所述需求电压值是否低于所述目标电压,若是,则执行s334,若否,则基于所述目标电压和所述基准偏差角控制电机运行,使得所述电机匹配到所述基准电角度值时的当前转速达到期望转速;
19、s334,将所述基准偏差角划分为多段偏差区间,控制电机按所述需求电压值运行并补偿一段偏差区间后,获取当前转速;
20、s335,基于所述当前转速、占空比最小调整值和期望转速确定占空比的步长,基于所述占空比的步长调整所述pwm信号的占空比;其中,占空比的步长=占空比最小调整值*(期望转速-当前转速)/当前转速;
21、具体地,若当前转速大于期望转速,则将所述pwm信号的占空比减去占空比的步长,作为调整后的pwm信号的占空比,从而减少电机的当前转速;若当前转速小于期望转速,则将所述pwm信号的占空比加上占空比的步长,作为调整后的pwm信号的占空比,从而增加电机的当前转速。
22、s336,按调整后的占空比控制电机运行并补偿下一段偏差区间后,获取当前转速,并确定待补偿的偏差区间之和是否小于预先设定的偏差阈值,若否,则执行s337;若是,则执行s339;
23、需要说明的是,通过对基准偏差角的不断迭代划分,基准偏差角的大小将会逐步减小,从而逼近基准电角度,那么划分出的偏差区间将会逐步减小,当减小到预先设定的偏差阈值时,可以停止迭代,通过执行s339实现电机匹配到所述基准电角度值时的当前转速达到期望转速。在一些实施例中,预先设定的偏差阈值可以为0.1°至5°。
24、s337,基于所述当前转速、目标电压和期望转速确定电压值的步长;其中,电压值的步长=目标电压*(期望转速-当前转速)/当前转速;
25、s338,实时确定所述电机当前的角度偏差,将所述电机当前的角度偏差作为基准偏差角,并基于所述电压值的步长更新所述需求电压值后,执行s334;
26、s339,基于所述当前转速、期望转速和最后一个偏差区间的角度值确定需求电压值,按所述需求电压值控制电机运行并补偿最后一段区间,使得所述电机匹配到所述基准电角度值时的当前转速达到期望转速。
27、可选地,所述基于所述目标电压和所述基准偏差角控制电机运行,使得所述电机匹配到所述基准电角度值时的当前转速达到期望转速,包括:
28、s3331,基于所述目标电压确定第一加速度,基于所述第一加速度和所述基准偏差角确定最短补偿时间;
29、s3332,确定所述最短补偿时间是否小于电机的一个周期时长,若是,则执行s3333;否则,保持第一加速度不变,每经历一个周期时长检测一次角度偏差,并更新最短补偿时间,在确定所述最短补偿时间小于一个周期时长时更新角度偏差,将更新后的角度偏差作为基准偏差角并执行s3333;
30、s3333,按基准偏差角和一个周期时长确定第二加速度,确定所述第二加速度对应的需求电压值,控制电机按所述需求电压值运行一个周期时长后,达到基准偏差角。
31、可选地,所述调整电机的运行电压和pwm信号的占空比,以优化电机按期望转速运行时的效率,包括:
32、获取pwm信号的占空比调整范围和电压调整范围;
33、在所述占空比调整范围和电压调整范围内,采用步进的方式调整电压和pwm信号的占空比,直至逼近最优效率。
34、可选地,所述在所述占空比调整范围和电压调整范围内,采用步进的方式调整电压和pwm信号的占空比,直至逼近最优效率,包括:
35、s421,获取电机的效率曲线图,基于所述效率曲线图确定电机在最优效率时对应的工作电压,将所述工作电压作为最优电压值;其中,所述效率曲线图标识有电机的效率随电机的工作电压而变化的曲线;
36、s422,基于电机匹配到所述基准电角度值后,电机的电压和pwm信号的占空比确定基准电压;
37、s423,按设定的电压步长朝最优电压值更新一次电机的电压,并按设定的占空比步长调整pwm信号的占空比;
38、s424,确定更新后的电压和调整后的占空比形成的平均电压,基于相邻两次平均电压的变化量和占空比的变化量的比值,确定电机的电压变化度,根据所述电压变化度确定占空比调整步长;
39、s425,基于所述占空比调整步长调整pwm信号的占空比,得到调整后的占空比;
40、s426,重复执行s424至s425,直至所述平均电压达到基准电压,并记录所述平均电压达到基准电压时pwm信号的占空比;
41、s427,确定电机的电压是否更新到最优电压值,若是,则结束,否则,确定相邻两次所述平均电压达到基准电压时,电机的电压变量和效率增量的比值,作为电机的效率变化度,根据所述效率变化度确定调整电压步长,基于所述调整电压步长调整电压步长,作为设定的电压步长,并跳转到s423。
42、第二方面,本发明实施例提供了一种电机的自适应控制系统,所述系统包括:
43、至少一个处理器;
44、至少一个存储器,用于存储至少一个程序;
45、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现如上述任意一项所述的电机的自适应控制方法。
46、第三方面,本发明实施例提供了一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行如上述任意一项所述的电机的自适应控制方法。
47、本发明的有益效果是:本发明公开一种电机的自适应控制方法、系统及存储介质,本发明将电压和pwm信号的占空比结合进行调整,综合考虑了多种因素,能够实现更佳的均衡效果,在保证电机运行准确度的同时,实现电机效率的最大化,从而做到兼顾电机控制的准确度和效率。
- 还没有人留言评论。精彩留言会获得点赞!