一种驱动电机控制方法及系统与流程
本发明涉及新能源汽车,特别涉及一种驱动电机控制方法及系统。
背景技术:
1、随着科技的进步以及生产力的快速发展,新能源电动汽车技术也日趋成熟,并且已经逐渐得到了人们的认可,已经在人们的日常生活中得到普及,极大的方便了人们的生活。
2、其中,驱动电机是新能源电动汽车的核心零部件之一,用于将电能转换成动能,以驱动车辆行驶。
3、基于此,现有的新能源电动汽车的行驶性能,大部分由驱动电机决定,因此,驱动电机行驶状态的好坏决定汽车行驶状态的好坏,然而,现有的新能源电动汽车内部的整车控制器对驱动电机的控制策略大部分采用固定参数或者固定的控制规则,而不能实时根据驱动电机的运行工况做出对应的参数调整,从而对应降低了驱动电机的驱动效率,同时降低了用户的使用体验。
技术实现思路
1、基于此,本发明的目的是提供一种驱动电机控制方法及系统,以解决现有技术不能实时根据驱动电机的运行工况做出对应的参数调整,导致降低了驱动电机的驱动效率的问题。
2、本发明实施例第一方面提出了:
3、一种驱动电机控制方法,其中,所述方法包括:
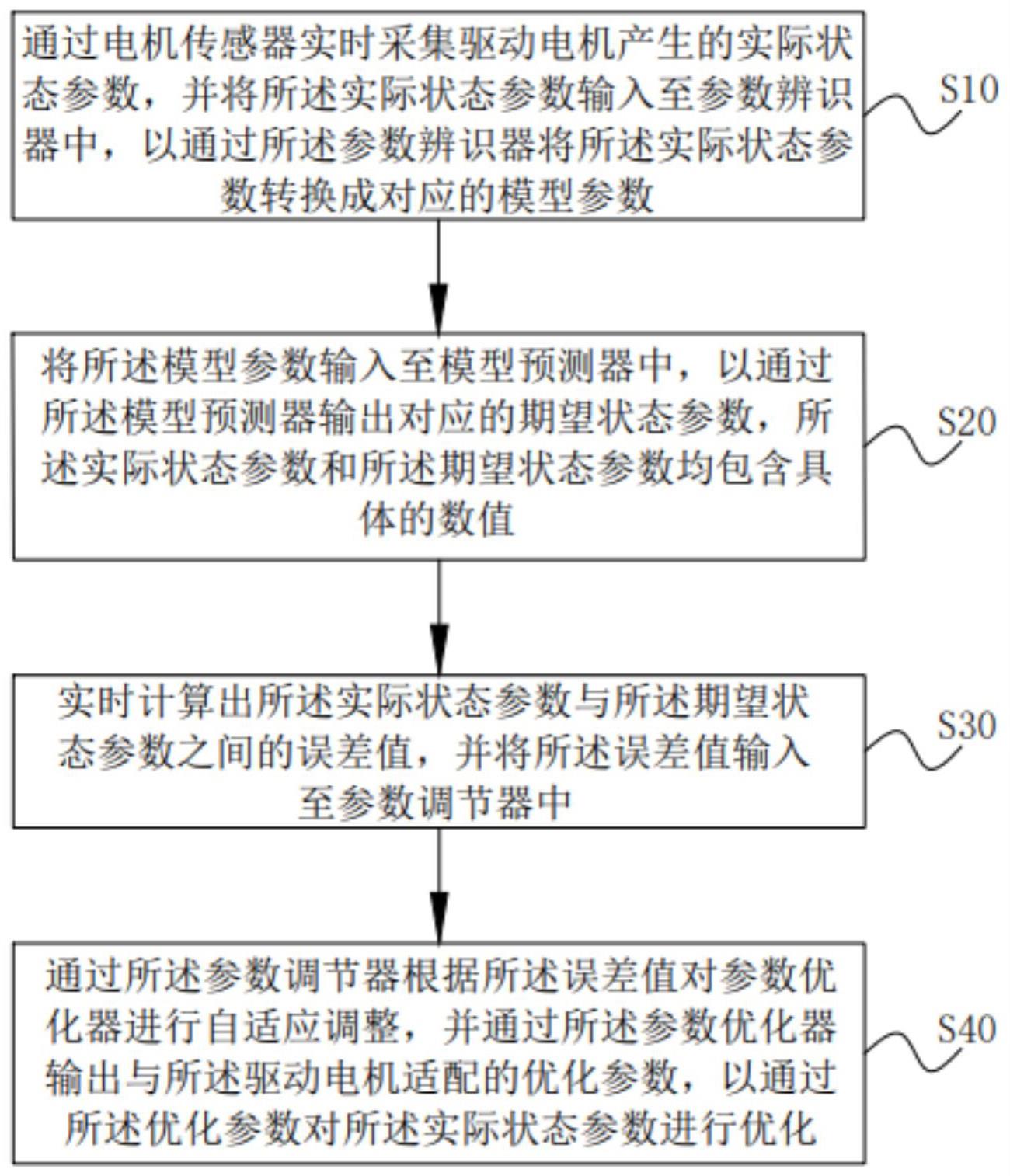
4、通过电机传感器实时采集驱动电机产生的实际状态参数,并将所述实际状态参数输入至参数辨识器中,以通过所述参数辨识器将所述实际状态参数转换成对应的模型参数;
5、将所述模型参数输入至模型预测器中,以通过所述模型预测器输出对应的期望状态参数,所述实际状态参数和所述期望状态参数均包含具体的数值;
6、实时计算出所述实际状态参数与所述期望状态参数之间的误差值,并将所述误差值输入至参数调节器中;
7、通过所述参数调节器根据所述误差值对参数优化器进行自适应调整,并通过所述参数优化器输出与所述驱动电机适配的优化参数,以通过所述优化参数对所述实际状态参数进行优化。
8、本发明的有益效果是:通过实时获取到的实际状态参数能够进一步转换成模型预测器能够识别的模型参数,基于此,就能够进一步通过该模型预测器输出与当前驱动电机适配的期望状态参数,即能够使驱动电机处于高性能的状态参数,进一步的,计算出需要的误差值,并最终根据该误差值获取到当前驱动电机需要的优化参数,从而能够自动使驱动电机持续的处于高效的工作状态,对应提升了用户的使用体验。
9、进一步的,所述通过所述参数辨识器将所述实际状态参数转换成对应的模型参数的步骤包括:
10、当获取到所述实际状态参数时,对所述实际状态参数进行预处理,并根据预处理后的实际状态参数生成对应的参数曲线图;
11、计算出所述参数曲线图中的曲率半径,并将所述曲率半径输入至所述参数辨识器中,以对应生成所述模型参数。
12、进一步的,所述将所述曲率半径输入至所述参数辨识器中,以对应生成所述模型参数的步骤包括:
13、当获取到所述曲率半径时,将所述曲率半径输入至所述参数辨识器的转换层中,以通过所述转换层将所述曲率半径转换成对应的曲率矩阵;
14、将所述曲率矩阵输入至所述参数辨识器的计算层中,以通过所述计算层中的最小二乘算法对所述曲率矩阵进行收敛处理,以对应生成所述模型参数。
15、进一步的,所述通过所述参数调节器根据所述误差值对参数优化器进行自适应调整的步骤包括:
16、当获取到所述误差值时,通过预设dtw算法对所述误差值进行序列化处理,以生成若干对应的特征序列,并提取出所述特征序列中包含的若干特征值,每一所述特征值均具有唯一性;
17、将若干所述特征值输入至所述参数优化器中,以完成对所述参数优化器的自适应调整。
18、进一步的,所述将若干所述特征值输入至所述参数优化器中,以完成对所述参数优化器的自适应调整的步骤包括:
19、当获取到若干所述特征值时,提取出所述参数优化器中存储的优化网络,并检测出所述优化网络中包含的若干网络节点;
20、识别出若干所述特征值之间的第一序列,并检测出若干所述网络节点之间的第二序列;
21、根据所述第一序列以及所述第二序列构建出对应的映射关系,并基于所述映射关系对所述参数优化器进行自适应调整。
22、进一步的,所述基于所述映射关系对所述参数优化器进行自适应调整的步骤包括:
23、逐一提取出每一所述网络节点中分别存储的原始网络参数,并基于所述映射关系将每一所述原始网络参数逐一替换为每一所述特征值,所述映射关系具有唯一性。
24、进一步的,所述方法还包括:
25、当通过所述特征值完成对所述参数优化器的调整时,通过所述参数优化器输出所述优化参数,并将所述优化参数输入至整车控制器中,以通过所述整车控制器根据所述优化参数对所述驱动电机进行优化控制。
26、本发明实施例第二方面提出了:
27、一种驱动电机控制系统,其中,所述系统包括:
28、采集模块,用于通过电机传感器实时采集驱动电机产生的实际状态参数,并将所述实际状态参数输入至参数辨识器中,以通过所述参数辨识器将所述实际状态参数转换成对应的模型参数;
29、预测模块,用于将所述模型参数输入至模型预测器中,以通过所述模型预测器输出对应的期望状态参数,所述实际状态参数和所述期望状态参数均包含具体的数值;
30、计算模块,用于实时计算出所述实际状态参数与所述期望状态参数之间的误差值,并将所述误差值输入至参数调节器中;
31、优化模块,用于通过所述参数调节器根据所述误差值对参数优化器进行自适应调整,并通过所述参数优化器输出与所述驱动电机适配的优化参数,以通过所述优化参数对所述实际状态参数进行优化。
32、进一步的,所述采集模块具体用于:
33、当获取到所述实际状态参数时,对所述实际状态参数进行预处理,并根据预处理后的实际状态参数生成对应的参数曲线图;
34、计算出所述参数曲线图中的曲率半径,并将所述曲率半径输入至所述参数辨识器中,以对应生成所述模型参数。
35、进一步的,所述采集模块还具体用于:
36、当获取到所述曲率半径时,将所述曲率半径输入至所述参数辨识器的转换层中,以通过所述转换层将所述曲率半径转换成对应的曲率矩阵;
37、将所述曲率矩阵输入至所述参数辨识器的计算层中,以通过所述计算层中的最小二乘算法对所述曲率矩阵进行收敛处理,以对应生成所述模型参数。
38、进一步的,所述优化模块具体用于:
39、当获取到所述误差值时,通过预设dtw算法对所述误差值进行序列化处理,以生成若干对应的特征序列,并提取出所述特征序列中包含的若干特征值,每一所述特征值均具有唯一性;
40、将若干所述特征值输入至所述参数优化器中,以完成对所述参数优化器的自适应调整。
41、进一步的,所述优化模块还具体用于:
42、当获取到若干所述特征值时,提取出所述参数优化器中存储的优化网络,并检测出所述优化网络中包含的若干网络节点;
43、识别出若干所述特征值之间的第一序列,并检测出若干所述网络节点之间的第二序列;
44、根据所述第一序列以及所述第二序列构建出对应的映射关系,并基于所述映射关系对所述参数优化器进行自适应调整。
45、进一步的,所述优化模块还具体用于:
46、逐一提取出每一所述网络节点中分别存储的原始网络参数,并基于所述映射关系将每一所述原始网络参数逐一替换为每一所述特征值,所述映射关系具有唯一性。
47、进一步的,所述驱动电机控制系统还包括控制模块,所述控制模块具体用于:
48、当通过所述特征值完成对所述参数优化器的调整时,通过所述参数优化器输出所述优化参数,并将所述优化参数输入至整车控制器中,以通过所述整车控制器根据所述优化参数对所述驱动电机进行优化控制。
49、本发明实施例第三方面提出了:
50、一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时实现如上面所述的驱动电机控制方法。
51、本发明实施例第四方面提出了:
52、一种可读存储介质,其上存储有计算机程序,其中,该程序被处理器执行时实现如上面所述的驱动电机控制方法。
53、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!