基于非奇异快速积分型终端滑模的永磁同步电机控制方法
本发明涉及电机控制,尤其涉及一种基于非奇异快速积分型终端滑模的永磁同步电机控制方法。
背景技术:
1、永磁同步电机具有气隙磁通密度高、功率密度高、结构紧凑、扭矩惯量比高和较好的鲁棒性能等优点而获得快速发展,常被用在光电稳定平台、机器人、机械臂等诸多领域。在对永磁同步电机的控制领域常用的为pi控制,但因其鲁棒性低且较易收到外界干扰而无法进行精密伺服控制。与其相比,滑模控制具有快速响应、对参数变化和扰动不灵敏的高鲁棒性、无须系统在线辨识、物理实现简单等优点,适于在控制精度要求较高的平台使用。
2、近些年来相关的研究人员提出了多种滑模控制器模型及其变种,来达到对永磁同步电机的精密伺服控制,如高阶滑模控制(hosmc)、自适应滑模控制(asmc)、分数阶滑模控制(fosmc)和终端滑模控制(tsmc)等。由于滑模控制的状态轨迹到达滑动模态面后,难以严格沿着滑动模态面向平衡点滑动,而是在其两侧来回穿越地趋近平衡点,从而对控制器产生抖振问题并且随着滑模控制器形式的复杂多变也易促使奇异值产生,其中终端滑模控制策略则更易产生奇异值问题。因此,亟需一种永磁同步电机控制方法,抑制滑模抖振并减少奇异值的产生,从而提高永磁同步电机的转速控制精度。
技术实现思路
1、本发明的目的是提出一种基于非奇异快速积分型终端滑模的永磁同步电机控制方法,以解决现有终端滑模速度控制器高抖振、易产生歧义值的问题。
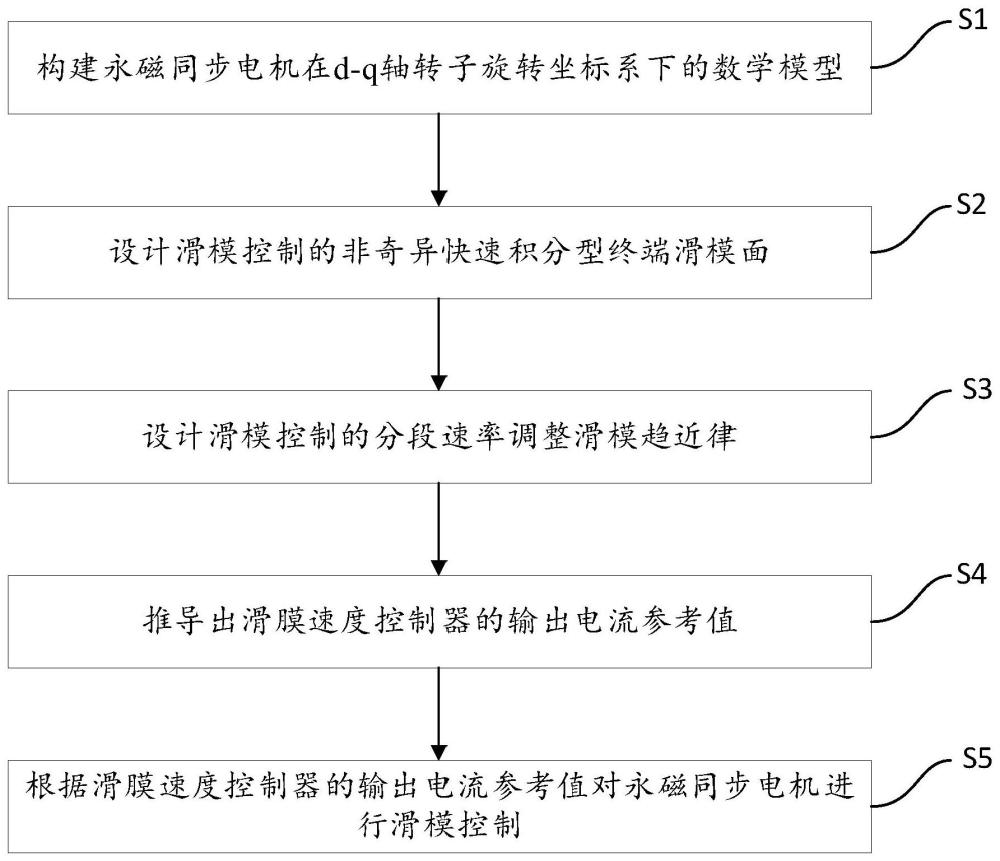
2、本发明提供一种基于非奇异快速积分型终端滑模的永磁同步电机控制方法,包括如下步骤:
3、s1、构建永磁同步电机在d-q轴转子旋转坐标系下的数学模型;
4、数学模型包括定子电压方程、电磁转矩方程和机械运动方程;其中,
5、定子电压方程如下:
6、
7、
8、其中,ud为d轴定子电压,uq为q轴定子电压,id为d轴定子电流,iq为q轴定子电流,ld为d轴电感,lq为q轴电感,ωe为转子电角速度,rs为定子电阻,ψf为转子磁链;
9、电磁转矩方程如下:
10、
11、其中,te为电磁转矩,pn为电机极对的数量;
12、机械运动方程如下:
13、
14、其中,j为惯性矩,ωm为转子机械角速度,tl为负载转矩,b为粘性摩擦系数;
15、根据式(1)-(4),当ld=lq时,te=3pnψfiq/2,得出:
16、
17、
18、其中,为ωm的导数;
19、考虑参数摄动和外界扰动,则将式(6)改写为:
20、
21、其中,δψf、δk、δb为参数摄动误差值,δa、δb、δz为参数摄动项;
22、定义系统总扰动d(t)为系统内部参数扰动和外部负载扰动,且假设满足|d(t)|≤l,l为干扰上界,则系统总扰动d(t)的表达式如下:
23、
24、其中,为电流参考值;
25、联立式(8)和式(7),可得:
26、
27、s2、设计滑模控制的非奇异快速积分型终端滑模面;其中,非奇异快速积分型终端滑模面s(t)的表达式如下:
28、
29、其中,k1和k2为滑模面常数参数,且k1和k2>0,q1和q2为满足q2>q1>0的奇整数,e(t)为速度误差,e(t)=ωr-ωm,ωr为速度参考值,e(τ)为误差积分项函数,sign(e(τ))为误差积分项的符号函数;
30、非奇异快速积分型终端滑模面的导数为:
31、
32、s3、设计滑模控制的分段速率调整滑模趋近律;其中,分段速率调整滑模趋近律的表达式如下:
33、
34、其中,m、n、ε、s0、λ为趋近率参数,m、n、ε、s0>0,0<λ<1,tanh(·)为双曲正切函数,h(·)在公式中已有定义,sign(·)为符号函数,|s|为s的绝对值,s为非奇异快速积分型终端滑模面;
35、s4、根据式(9)-(12)推导出滑膜速度控制器的输出电流参考值其中,滑膜速度控制器的输出电流参考值的表示式如下:
36、
37、其中,为ωr的导数;
38、s5、根据滑膜速度控制器的输出电流参考值对永磁同步电机进行滑模控制。
39、优选地,在步骤s4之后与步骤s5之前,还包括如下步骤:
40、设计滑模扰动观测器,将滑模扰动观测器观测到的扰动值作为前馈信号,对滑模速度控制器的输出进行自适应补偿。
41、优选地,将式(9)改写为以下形式:
42、
43、针对式(14),将滑模扰动观测器设计为以下形式:
44、
45、式中,为ωm的估计值,g为观测增益值,为系统总扰动估计值,usmdo为滑模扰动观测器误差的滑模率,为的导数,令速度估计误差值扰动估计误差值则将式(14)与式(15)作差,得到:
46、
47、滑模扰动观测器采用的积分型滑模面sω为:
48、
49、滑模扰动观测器的滑模趋近律为:
50、
51、式中,m1和n1为正常数,且0<λ1<1;
52、通过联立式(16)-式(18),可得到滑模扰动观测器的扰动估计值,且忽略其内部扰动项ed,则:
53、
54、利用滑模扰动观测器,将系统总扰动估计值补偿到滑膜速度控制器的输出电流参考值中,并将滑膜速度控制器的输出电流参考值重写为:
55、
56、将式(19)代入式(15)获得系统总扰动估计值将系统总扰动估计值代入式(20),获得补偿后的滑模控制率。
57、本发明提出的基于分段速率调整滑模趋近律的非奇异快速积分型终端滑模控制方法相较传统终端滑模控制能有效避免奇异值的产生且具有更快的收敛性和更小的抖振。
技术特征:
1.一种基于非奇异快速积分型终端滑模的永磁同步电机控制方法,其特征在于,包括如下步骤:
2.根据权利要求1的基于非奇异快速积分型终端滑模的永磁同步电机控制方法,其特征在于,在步骤s4之后与步骤s5之前,还包括如下步骤:
3.根据权利要求2的基于非奇异快速积分型终端滑模的永磁同步电机控制方法,其特征在于,将式(9)改写为以下形式:
技术总结
本发明涉及电机控制技术领域,尤其涉及一种基于非奇异快速积分型终端滑模的永磁同步电机控制方法,包括如下步骤:S1、构建永磁同步电机在d‑q轴转子旋转坐标系下的数学模型;S2、设计滑模控制的非奇异快速积分型终端滑模面;S3、设计滑模控制的分段速率调整滑模趋近律;S4、根据数学模型、非奇异快速积分型终端滑模面与分段速率调整滑模趋近律推导出滑膜速度控制器的输出电流参考值;S5、根据滑膜速度控制器的输出电流参考值对永磁同步电机进行滑模控制。本发明提出的基于分段速率调整滑模趋近律的非奇异快速积分型终端滑模控制方法相较传统终端滑模控制能有效避免奇异值的产生且具有更快的收敛性和更小的抖振。
技术研发人员:霍子民,储海荣,王福超,沈宏海
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!