四开关Buck-Boost变换器及其控制方法与流程
本发明实施例涉及电力电子,尤其涉及一种四开关buck-boost变换器及其控制方法。
背景技术:
1、随着新能源技术的发展,dc/dc变换器在电动汽车功率变换、光伏系统、储能系统、直流微电网等领域有着广泛的应用。
2、目前,在非隔离dc/dc变换器中,四开关buck-boost变换器具有宽电压范围、输入输出同极性、既可以升压又可以降压、能量双向流动等特点,相较于其他非隔离dc/dc变换器,四开关buck-boost变换器更适用于宽范围电压变化的场合。
3、但是,现有技术中对四开关buck-boost变换器的控制方式较为复杂、功耗大、在模式切换时系统波动大,不利于四开关buck-boost变换器的运行。
技术实现思路
1、本发明实施例提供了一种四开关buck-boost变换器及其控制方法,以解决四开关buck-boost变换器在模式切换时不稳定的问题。
2、根据本发明的一方面,提供了一种四开关buck-boost变换器的控制方法,所述四开关buck-boost变换器由buck单元和boost单元构成,所述四开关buck-boost变换器包括4个开关管和1个电感,所述控制方法包括:
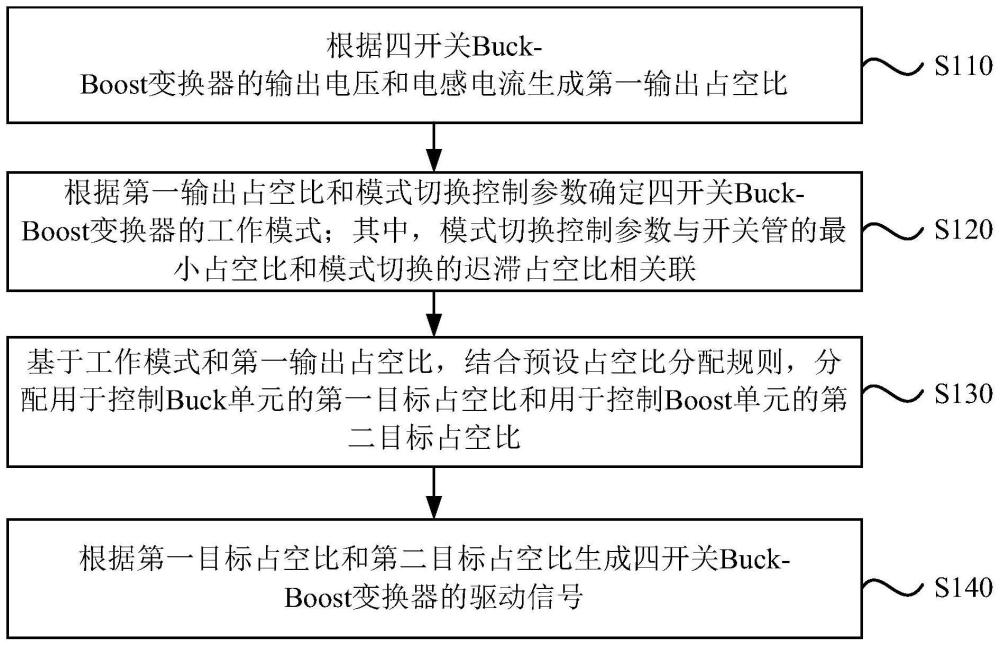
3、根据所述四开关buck-boost变换器的输出电压和电感电流生成第一输出占空比;
4、根据所述第一输出占空比和模式切换控制参数确定所述四开关buck-boost变换器的工作模式;其中,所述模式切换控制参数与所述开关管的最小占空比和模式切换的迟滞占空比相关联;
5、基于所述工作模式和所述第一输出占空比,结合预设占空比分配规则,分配用于控制所述buck单元的第一目标占空比和用于控制所述boost单元的第二目标占空比;
6、根据所述第一目标占空比和所述第二目标占空比生成所述四开关buck-boost变换器的驱动信号。
7、可选地,在确定所述四开关buck-boost变换器的工作模式之前,还包括:
8、根据所述四开关buck-boost变换器的输入电压和所述输出电压计算前馈信号;
9、所述根据所述第一输出占空比和模式切换控制参数确定所述四开关buck-boost变换器的工作模式包括:
10、根据所述第一输出占空比和所述前馈信号生成第二输出占空比;
11、以所述第二输出占空比为模式判别的输入信号,结合所述模式切换控制参数确定所述四开关buck-boost变换器的工作模式;
12、所述基于所述工作模式和所述第一输出占空比,结合预设占空比分配规则,分配用于控制所述buck单元的第一目标占空比和用于控制所述boost单元的第二目标占空比包括:
13、根据所述第一输出占空比和所述前馈信号生成第二输出占空比;
14、根据所述工作模式和所述第二输出占空比,结合预设占空比分配规则,分配用于控制所述buck单元的第一目标占空比和用于控制所述boost单元的第二目标占空比。
15、可选地,所述以所述第二输出占空比为模式判别的输入信号,结合所述模式切换控制参数确定所述四开关buck-boost变换器的工作模式包括:
16、当所述四开关buck-boost变换器当前的工作模式为buck模式时:
17、若所述第二输出占空比大于第三预设占空比,则确定所述工作模式由所述buck模式切换为boost模式;
18、若所述第二输出占空比大于第一预设占空比,且小于或等于所述第三预设占空比,则确定所述工作模式由所述buck模式切换为buck-boost模式;
19、当所述四开关buck-boost变换器当前的工作模式为buck-boost模式时:
20、若所述第二输出占空比小于第二预设占空比,则确定所述工作模式由所述buck-boost模式切换为buck模式;
21、若所述第二输出占空比大于所述第三预设占空比,则确定所述工作模式由所述buck-boost模式切换为boost模式;
22、当所述四开关buck-boost变换器当前的工作模式为boost模式时:
23、若所述第二输出占空比小于所述第二预设占空比,则确定所述工作模式由所述boost模式切换为buck模式;
24、若所述第二输出占空比大于或等于所述第二预设占空比,且小于第四预设占空比,则确定所述工作模式由所述boost模式切换为buck-boost模式;
25、所述第一预设占空比、所述第二预设占空比、所述第三预设占空比和所述第四预设占空比满足如下条件:
26、
27、其中,d_buck_hi为所述第一预设占空比,d_buck_lo为所述第二预设占空比,d_boost_hi为所述第三预设占空比,d_boost_lo为所述第四预设占空比,dmin为所述最小占空比,dhyst为所述迟滞占空比。
28、可选地,所述预设占空比分配规则包括:
29、
30、
31、其中,d1为所述第一目标占空比,d2为所述第二目标占空比,d为所述第二输出占空比,d2buck-boost=2*dmin+dhyst。
32、可选地,所述预设占空比分配规则包括:
33、
34、
35、其中,dclamp为修正系数,dclamp=min(max(d,d_buck_lo),d_boost_lo)。
36、可选地,所述预设占空比分配规则包括:
37、
38、
39、其中,d1buck-boost=1-2*dmin-dhyst。
40、可选地,所述控制方法还包括:
41、在持续预设时间内,当所述输出电压与所述输入电压之间的差值的绝对值小于预设电压,所述电感电流大于负向电流限制值与电流迟滞量之和,并且所述电感电流小于正向电流限制值与所述电流迟滞量的差值时,所述四开关buck-boost变换器的工作模式由开关模式切换至直通模式;
42、所述控制方法还包括:
43、当所述电感电流大于等于所述正向电流限制值,或者小于等于所述负向电流限制值时,所述四开关buck-boost变换器的工作模式由所述直通模式切换至所述开关模式;
44、在所述直通模式下,所述第一目标占空比为1,所述第二目标占空比为0;
45、其中,所述开关模式包括buck模式、buck-boost模式或boost模式中的一种。
46、可选地,所述根据所述第一目标占空比和所述第二目标占空比生成所述四开关buck-boost变换器的驱动信号包括:
47、根据所述第一目标占空比生成所述buck单元的第一驱动信号和第二驱动信号,根据所述第二目标占空比生成所述boost单元的的第三驱动信号和第四驱动信号;
48、其中,所述第一驱动信号和所述第二驱动信号为互补信号,所述第三驱动信号和所述第四驱动信号为互补信号,所述第一驱动信号与所述第三驱动信号的相位相差180°。
49、根据本发明的另一方面,提供了一种四开关buck-boost变换器,包括第一开关管、第二开关管、第三开关管、第四开关管、电感、电容和控制模块;所述第一开关管的第一极为所述变换器的第一输入端,所述第一开关管的第二极经所述电感与所述第四开关管的第一极连接,所述第四开关管的第二极为所述变换器的第一输出端,所述第二开关管的第一极与所述第一开关管的第二极连接,所述第二开关管的第二极为所述变换器的第二输入端,所述第三开关管的第一极与所述第四开关管的第一极连接,所述第三开关管的第二极为所述变换器的第二输出端,所述电容连接于所述变换器的第一输出端和第二输出端之间;
50、所述控制模块包括:
51、信号处理单元,用于采集所述变换器的输入电压、输出电压和电感电流;
52、采样单元,用于将所述信号处理单元输出的所述输入电压、所述输出电压和所述电感电流分别转换为对应的数字信号;
53、反馈控制单元,用于根据所述输出电压的数字信号和所述电感电流的数字信号生成第一输出占空比;
54、模式判别单元,用于根据所述第一输出占空比和模式切换控制参数确定所述四开关buck-boost变换器的工作模式;其中,所述模式切换控制参数由所述开关管的最小占空比和模式切换的迟滞占空比共同决定;
55、占空比分配单元,用于根据所述工作模式和所述第一输出占空比,结合预设占空比分配规则,分配用于控制所述第一开关管和所述第二开关管的第一目标占空比,以及用于控制所述第三开关管和所述第四开关管的第二目标占空比;
56、驱动信号生成单元,用于根据所述第一目标占空比和所述第二目标占空比生成第一驱动信号、第二驱动信号、第三驱动信号和第四驱动信号;其中,所述第一驱动信号接入所述第一开关管的栅极,所述第二驱动信号接入所述第二开关管的栅极,所述第三驱动信号接入所述第三开关管的栅极,所述第四驱动信号接入所述第四开关管的栅极。
57、可选地,所述控制模块还包括占空比前馈计算单元和加法器,所述加法器连接于所述反馈控制单元的输出端和所述占空比分配单元的输入端之间;
58、所述占空比前馈计算单元与所述加法器连接,所述占空比前馈计算单元用于根据所述输入电压的数字信号和所述输出电压的数字信号计算得到前馈信号,所述加法器用于将所述前馈信号和所述第一输出占空比叠加,得到第二输出占空比;
59、所述反馈控制单元包括电流内环控制单元和电压外环控制单元。
60、本发明实施例提供的四开关buck-boost变换器及其控制方法,根据四开关buck-boost变换器的输出电压和电感电流生成第一输出占空比,根据第一输出占空比和模式切换控制参数确定四开关buck-boost变换器的工作模式;其中,模式切换控制参数与开关管的最小占空比和模式切换的迟滞占空比相关联;基于工作模式和第一输出占空比,结合预设占空比分配规则,分配用于控制buck单元的第一目标占空比和用于控制boost单元的第二目标占空比;然后根据第一目标占空比和第二目标占空比生成四开关buck-boost变换器的驱动信号。本方案基于最小占空比和迟滞占空比,并结合预设占空比分配规则得到第一目标占空比和第二目标占空比,以控制四个开关管,通过在工作模式切换的触发条件中设置了开关管的最小占空比,以避免开关管工作在临界条件时造成增益非线性,同时设置迟滞占空比,来避免系统在临界点出现工作模式频繁切换的现象,有利于提高系统的工作稳定性。
61、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!