基于改进增量型PID的PG电机控制方法与流程
本发明涉及电机控制,特别是一种基于改进增量型pid的pg电机控制方法。
背景技术:
1、在电机调速控制领域,为能够快速、精确地控制电机速度,通常会通过速度反馈信号来改变电机驱动能力的大小。pg电机的位置传感器一般为霍尔传感器,常用的pg电机通常为三个霍尔传感。霍尔传感器可以通过电磁感应,输出“0”和“1”两种位置信息,pg电机的三个霍尔传感器可将电机的一个旋转周期分为三份,并在每个传感器位置轮询输出“1”作为反馈当前的位置信息。
2、通常情况下,为了通过霍尔传感器估算到电机转速,一般在固定的单位时间内采集传感器触发次数作为电机转速,电机旋转一圈,所经过的霍尔传感器越多,对于速度的估计就越准确。常见的用于控制电机转速的pid算法包括:位置型、增量型、积分分离等多种具体实现方法。增量型pid主要是通过计算目标值与设定值的当前误差、上次误差、上上次误差,通过这种误差来调节电机的驱动能力,从而使转速能够快速达到期望。
技术实现思路
1、为解决现有技术中存在的问题,本发明的目的是提供一种基于改进增量型pid的pg电机控制方法,本发明能更快更稳达到目标速度。
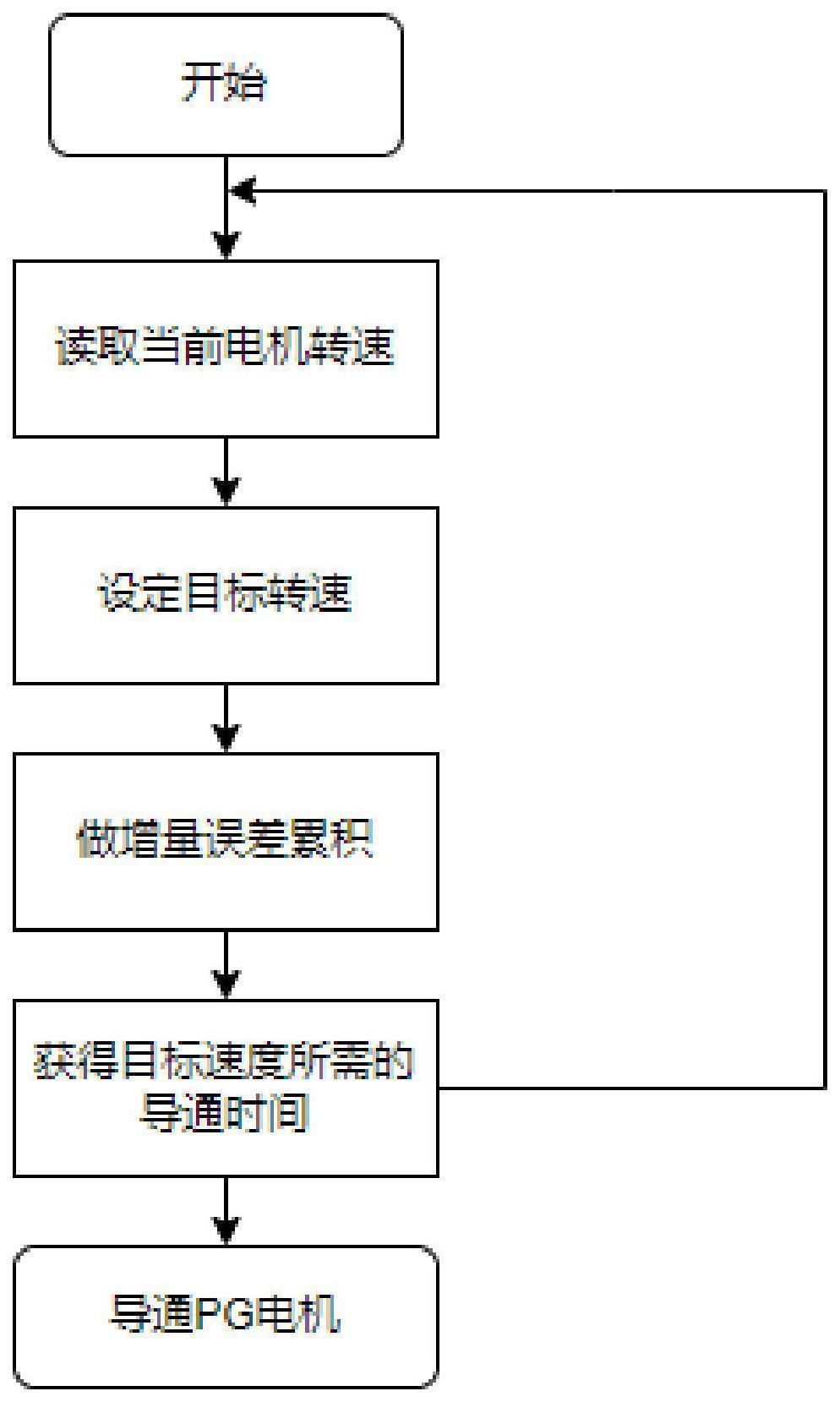
2、为实现上述目的,本发明采用的技术方案是:一种基于改进增量型pid的pg电机控制方法,包括转速反馈模块、pid运算模块和电机驱动模块,所述的控制方法包括以下步骤:
3、步骤1、转速反馈模块计算pg电机转速,通过单位时间内转速反馈模块计数差值得到当前的转速;
4、步骤2、将得到的转速反馈信号传入pid运算模块,pid运算模块根据当前值与目标值的误差,计算出得到目标速度所需要增量;
5、步骤3、将增量传入电机驱动模块,控制pg电机的导通时间,从而使电机转速提升或降低至所设定的目标速度,同时检测当前pg电机转速并传入pid运算模块,重复步骤1-步骤3。
6、作为本发明的进一步改进,所述转速反馈模块为霍尔传感器。
7、本发明的有益效果是:
8、本发明可实现pg电机转速的全自动控制,一旦p、i、d参数整定成功,仅需设定当前需要的转速,整个转速控制过程将无需外部介入。除此之外,采用该模型控制的电机,可以在极短的时间内,快速从较低的当前速度,累加到所需要的目标速度,在更短时间内实现转速的大跨度改变并迅速稳定到目标转速,在时间效率方面,较传统pg电机控制方法能更快更稳达到目标速度。
技术特征:
1.一种基于改进增量型pid的pg电机控制方法,其特征在于,包括转速反馈模块、pid运算模块和电机驱动模块,所述的控制方法包括以下步骤:
2.根据权利要求1所述的基于改进增量型pid的pg电机控制方法,其特征在于,所述转速反馈模块为霍尔传感器。
技术总结
本发明公开了一种基于改进增量型PID的PG电机控制方法,包括转速反馈模块、PID运算模块和电机驱动模块,所述的控制方法包括:转速反馈模块计算PG电机转速,通过单位时间内转速反馈模块计数差值得到当前的转速;将得到的转速反馈信号传入PID运算模块,PID运算模块根据当前值与目标值的误差,计算出得到目标速度所需要增量;将增量传入电机驱动模块,控制PG电机的导通时间,从而使电机转速提升或降低至所设定的目标速度,同时检测当前PG电机转速并传入PID运算模块;本发明能更快更稳达到目标速度。
技术研发人员:田运糖
受保护的技术使用者:四川奥库科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!