一种高压输电线螺栓紧固无人机挂载机器人作业系统的制作方法
本发明涉及输电线维修设备,尤其涉及一种高压输电线螺栓紧固无人机挂载机器人作业系统。
背景技术:
1、三角、水平排列双分裂导线是常用的输电线分布方式,螺栓以其结构简单、成本低廉的特点,成为了输电线路上广泛应用的连接构件。由于输电线路位于户外,复杂的气候条件会引起输电线路震动、膨胀或收缩,从而导致螺栓松动,造成输电线路安全隐患。目前,输电线路螺栓紧固基本仍由人工带电作业来完成,在高空、高电压、环境恶劣的高危条件下,人工作业效率低下,且由于特高压电网和多回路杆塔的广泛应用,电压等级越来越高、相间距离越来越近,人工带电作业极为危险,亟需研发螺栓紧固机器人替代人工实现线路的安全高效带电作业。
2、现有技术使用采用无人机-机器人结合的形式代替人工进行螺栓拧紧工作,但是现有的无人机对机器人或机器人辅助上线装置在输电线路上的不能精准放置,现有的采用螺栓紧固机器人替代人工带电作业的机器人过于笨重、对于拧紧螺栓的操作不灵活,会有意外掉落的情况出现。
技术实现思路
1、鉴于上述现有高压输电线螺栓紧固无人机挂载机器人作业系统存在的问题,提出了本发明。
2、因此,本发明目的是提供一种高压输电线螺栓紧固无人机挂载机器人作业系统,其目的在于:解决人工带电作业的机器人过于笨重、对于拧紧螺栓的操作不灵活,会有意外掉落的情况出现。
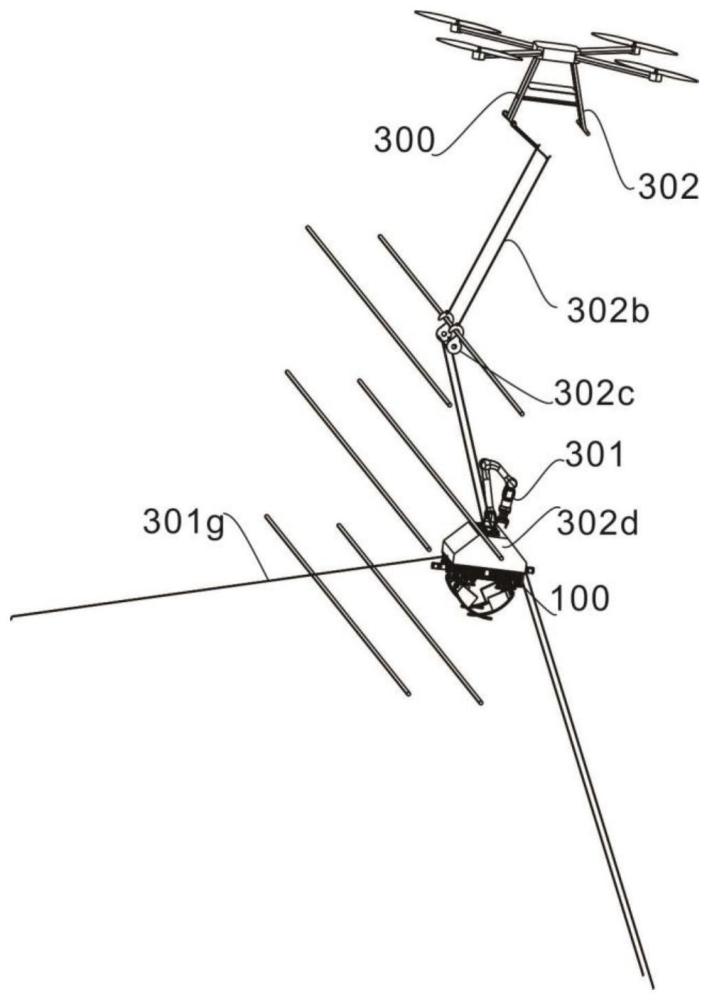
3、为解决上述技术问题,本发明提供如下技术方案:一种高压输电线螺栓紧固无人机挂载机器人作业系统,包括上线部件,包括防脱件,所述防脱件一侧安装有导向条,所述防脱件一侧安装有支撑架,所述防脱件一侧安装有导线平移件,调节部件,位于所述上线部件的一侧,所述调节部件包括行走件,所述行走件上安装有升降件,所述行走件一侧安装有行走轮,所述升降件上安装有伸缩臂,安装部件,位于所述上线部件的一侧,所述安装部件包括机械手,所述机械手上固定连接有夹爪,所述安装部件还包括无人机。
4、作为本发明所述高压输电线螺栓紧固无人机挂载机器人作业系统的一种优选方案,其中:所述导向条上安装有用于供电的电池,所述导向条一侧固定连接有转动杆,所述转动杆上固定连接有三组风叶,所述转动杆一侧固定连接有伸缩杆,所述伸缩杆上固定连接有棘轮,所述伸缩杆一端呈圆形,所述转动杆转动连接有滑动限位杆,所述滑动限位杆两侧滑动连接有u形支撑滑杆,所述u形支撑滑杆上固定连接有限位柱,所述u形支撑滑杆上固定连接有棘齿条,所述转动杆两侧安装有滑块,所述滑块两侧固定连接有磁铁,所述伸缩杆两侧固定连接有凸块,所述滑动限位杆内部开设有两个半圆弧槽,所述滑动限位杆上的半圆弧槽两端固定连接有圆环状磁铁,所述滑动限位杆上的圆环状磁铁内部滑动连接有顶杆,所述顶杆两端为斜面。
5、作为本发明所述高压输电线螺栓紧固无人机挂载机器人作业系统的一种优选方案,其中:所述导线平移件包括安装板和两个第一固定座,所述第一固定座固定于所述支撑架上,所述第一固定座上固定连接有平移电机,每个所述第一固定座上安装有第一轴承,所述平移电机的输出轴固定连接有第一丝杆,所述第一丝杆两侧滑动连接有第一滑块,所述第一滑块底部固定连接有第一连接座,所述第一连接座的底部固定连接有线轮,所述支撑架上开设有供所述第一滑块滑动的第一滑孔;所述第一滑孔的两侧安装有第一滑轨,所述第一连接座上设有与两个与所述第一滑轨对应的第一滑槽,所述第一连接座通过第一滑槽滑动连接于所述第一滑轨上。
6、作为本发明所述高压输电线螺栓紧固无人机挂载机器人作业系统的一种优选方案,其中:所述行走件包括行走电机,所述行走轮外侧安装有u型安装座,所述行走电机固定安装在所述u型安装座的底部,所述行走电机的输出轴穿过所述u型安装座与所述行走轮连接,所述u型安装座顶部安装有行走座板,所述行走座板固定于所述支撑架的下方,所述行走座板的两侧固定连接有第三固定座,所述第三固定座上均设有第三轴承,所述第三固定座上的第三轴承上固定连接有第三丝杆,所述第三丝杆一端固定连接有调节电机,所述行走座板的两侧开设有第二滑孔,所述第三丝杆一端转动连接有第二滑块,所述第二滑块一端安装有第二连接座,所述行走座板的底部安装有两根第三滑轨,所述第二连接座上开设有与所述第三滑轨对应的第三滑槽,所述第二滑孔之间开设有穿孔。
7、作为本发明所述高压输电线螺栓紧固无人机挂载机器人作业系统的一种优选方案,其中:所述支撑架上固定连接有臂架,所述伸缩臂固定连接有所述安装板,所述升降件还包括升降电机,所述升降电机固定连接有第二丝杆,所述第二丝杆的两端固定连接有第二轴承,所述第二丝杆上的第二轴承上安装有两个第二固定座,所述第二丝杆转动连接有连接板,所述伸缩臂的两侧安装有第二滑轨,所述臂架的内侧开设有与所述第二滑轨对应的第二滑槽,所述第二滑轨滑动于第二滑槽上。
8、作为本发明所述高压输电线螺栓紧固无人机挂载机器人作业系统的一种优选方案,其中:所述无人机包括机架,所述机架上安装有电控插销,所述机架固定连接有牵引绳以及挂钩,所述挂钩的顶部通过所述牵引绳与电控插销连接,所述挂钩的底部通过另一根所述牵引绳与保护壳的顶部连接。
9、作为本发明所述高压输电线螺栓紧固无人机挂载机器人作业系统的一种优选方案,其中:所述机械手底部开设有凹槽,所述机械手底部的凹槽内滑动连接有横移滑轨,所述机械手一侧安装有横移电机,所述机械手的底部固定连接有移动块,所述移动块螺纹连接有第四固定座,所述第四固定座的轴承啮安装有第四丝杆,所述横移电机固定连接有所述第四丝杆,所述支撑架的底部固定连接有若干辅助拉线。
10、本发明的有益效果:本发明中通过无人机将高压输电线螺栓紧固挂载机器人稳定的传送至输电线上,使得机器人组件平稳精准的挂在输电线且能够平稳的在导线上移动作业,最后通过可自由滑动的机械手上的夹爪对松动螺栓进行拧紧工作,通过升降组件来控制伸缩臂的上下活动,通过导线平移部上的线轮配合行走轮对导线形成夹持,将支撑架精准的悬挂在于导线上,并且通过行走轮使得本装置能够在导线上自由行走,对螺栓松动的位置进行精准定位,通过在行走轮的外侧设置有弧形导向条,可沿支撑架在导线上横向移动,有助于将上线装置引导上线,通过导向条的转动,保护高压输电线螺栓紧固挂载机器人由于极端天气等意外情况脱落造成损伤。
11、鉴于上述现有高压输电线螺栓紧固无人机挂载机器人作业系统存在的问题,提出了本发明。
12、为解决上述技术问题,本发明还提供如下技术方案:一种高压输电线螺栓紧固无人机挂载机器人作业方法,包括通过无人机与辅助拉线将装置移动至高压线上,通过导向条的设置将装置更便捷的移动至两条线上,通过升降件实现将装置移动至方便夹持的位置,通过导线平移件与行走件使得对两条高压线进行夹紧同时在线上行走。
13、本发明的有益效果:使用无人机和辅助拉线将高压输电线螺栓紧固挂载机器人移动至高压线上。设置导向条,使装置更便捷地移动到两条高压线上。使用升降件将装置移动至方便夹持的位置。使用导线平移件和行走件夹紧两条高压线并同时在上行走。使用防脱件旋转,方便夹持电线并防止装置意外掉落。使用机械手调节电线旋紧螺栓的位置并紧固电线螺栓。
- 还没有人留言评论。精彩留言会获得点赞!