一种随机频率注入最大转矩电流比控制系统及方法
本发明属于内置式永磁同步电机领域,尤其是涉及一种随机频率注入最大转矩电流比控制系统及方法。
背景技术:
1、内置式永磁同步电机(interior permanent magnet synchronous motor,ipmsm)具有高转矩密度、高效率、体积小等优点,已广泛应用于电动汽车、舰艇推进、航空航天等高端领域。针对ipmsm的结构特性,id=0控制没有利用磁阻转矩,不利于电机效率的提高。为了在输出相同的电磁转矩下使定子电流幅值最小,最大转矩电流比(maximum torque perampere,mtpa)控制受到越来越多的学者关注。
2、然而电机参数会随着工况的不同而发生变化,所以不能直接将电机铭牌上的参数代入公式中进行计算从而进行控制,这将会影响mtpa控制的精度。本发明采用rnn算法用于预测电机的输出转速或输出转矩,有助于实现精确的电机控制,确保电机在不同负载和工作条件下保持稳定的运行,提高系统性能和效率。在此基础上,采用信号注入法,通过向电流矢量角中注入高频正弦或方波信号,构建注入信号后的模型,将反馈信号进行解调和分析,实现高精度的mtpa控制。
3、通过信号注入法实现mtpa控制尽管可以实现无需参数的控制,然而由于向电流中注入了高频信号,会因此产生高频电流响应,从而产生额外的振动和噪声,对于电机而言,会影响其运行的稳定性和安全性。
技术实现思路
1、为摆脱内置式永磁电机mtpa控制参数依赖性,并在实现信号注入法mtpa控制的同时降低其产生的额外振动和噪声。本发明公开了一种随机频率注入mtpa控制系统及其方法,能够减少电机能量损耗,提高系统效率,并且提升控制系统稳定性和可靠性。
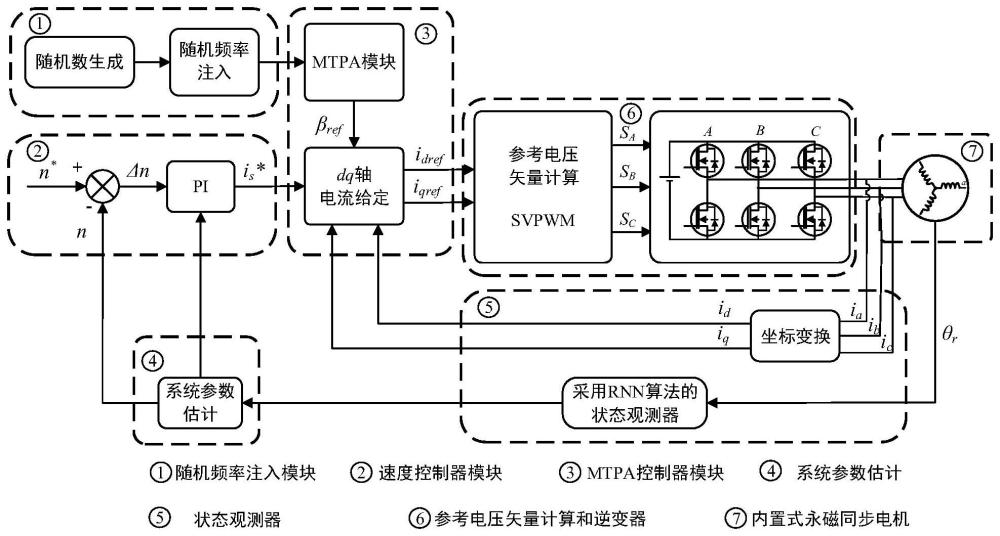
2、技术方案为:一种随机频率注入最大转矩电流比控制系统,控制系统包含随机频率注入模块、速度控制器模块、mtpa控制器模块、系统参数估计模块、状态观测器模块、参考电压矢量计算和逆变器及内置式永磁同步电机;
3、所述速度控制器模块输入为实际转速和给定转速,输出参考电流到dq轴电流给定模块;
4、所述随机频率注入模块包含随机数生成和随机频率注入两部分,输出为注入的随机频率;
5、所述mtpa控制器模块输入为注入的随机频率,输出分配dq轴电流的参考电流矢量角到dq轴电流给定模块;
6、所述系统参数估计模块引入em算法进行控制系统参数估计,通过对隐变量的估计,输出电机的电感参数、控制器的增益参数、观测器的参数、混合高斯模型的参数、高频噪声参数以及观测误差参数;
7、所述状态观测器模块包含采用rnn算法的状态观测器以及坐标变换系统,输入为传感器数据分别是电机转子位置角和三相电流,rnn算法输出电机当前的的转矩和电流矢量角,坐标变换系统将旋转坐标系下的dq轴电流送入dq轴电流给定模块;
8、dq轴电流给定模块将输出参考dq轴电流到参考电压矢量计算模块,所述参考电压矢量计算模块和逆变器输入为参考dq轴电压矢量,经过坐标变换转换成自然坐标系通过选择扇区输出电压矢量,由逆变器输出开关信号;
9、所述内置式永磁同步电机,其dq轴电感不相等,具有凸极效应。
10、进一步,内置式永磁同步电机利用其凸极性,在相同电流幅值情况下能输出最大转矩,能够降低系统铜耗,能够摆脱电机参数随工况的影响,实现无需参数更鲁棒的最大转矩电流比控制。
11、进一步,通过将高频噪声随机分配至不同频率,在实现信号注入mtpa控制的同时,降低了其噪声峰值。
12、本发明的一种随机频率注入最大转矩电流比控制系统的方法,包含以下实施步骤:
13、步骤1:状态观测器模块根据位置信号传感器得到得位置信息计算出电机实时转速,根据电流传感器采集得到得电流信号以及位置信号传感器得到得位置信息计算出三相绕组电流和位置信号,根据rnn算法得到预测电机的最佳电流注入策略;
14、步骤2:系统参数估计模块根据em算法通过对隐变量的估计,估计出电机的电感参数、控制器的增益参数、观测器的参数、混合高斯模型的参数、高频噪声参数以及观测误差参数;
15、步骤3:通过线性同余法,得出一个范围内的随机数,其基本原理是通过对前一个数进行线性运算并取模从而得到下一个数,递归公式为:
16、
17、其中xn+1是递归前项,yn+1是递归后项,a称为乘数,c称为增量,m称为模数,乘数、增量和模数的选取可以多种多样,为保证产生的随机数有较好的均匀性和随机性,本发明采用m=2km=2k的混合同余法;线性同余法的最大周期是m,但一般情况下会小于m,要使周期达到最大,应该满足以下条件:
18、(1)c和m互质;
19、(2)m的所有质因子的积能整除a-1;
20、(3)若m是4的倍数,则a-1也是;
21、(4)a,c(初值,一般即种子)都比m小;
22、(5)a,c是正整数;
23、生成所得随机数yn+1后,根据当前电机转速分配注入电流矢量角的频率,为保证注入频率有效,但同时也要保证噪声尖峰降低效果;
24、步骤4:向电流矢量角上注入步骤3中选择的随机频率信号,计算出相应的功率解调后实现mtpa控制,降低系统铜耗从而提升系统效率,ipmsm在dq轴同步坐标系下的转矩te方程可以表示为:
25、
26、
27、式中,te是电机输出转矩,ψf是永磁体磁链,is是由pi控制器输出的参考定子电流幅值,β是定子电流矢量角,ld、lq是电机dq轴电感,id、iq分别是电机dq轴电流,p是电机极对数;由以上等式可知,在满足稳态输出转矩的条件下,存在唯一的β,也就是dq轴电流的参考电流矢量角,使定子电流幅值最小,即mtpa工作点;令转矩表达式对电流矢量角的导数等于零,可以求得电机运行在mtpa工作点时的最佳电流矢量角:
28、
29、向当前电流矢量角β中注入高频信号βh=sinωht,其中ωh是注入信号的频率,此时含有高频信号的dq轴电流可以表示为:
30、
31、idh、iqh分别是注入信号后的电机dq轴电流,a为系数,相应的含有高频信号响应的电磁转矩可以表示为:
32、
33、其中,δβ是注入的电流角,通过滤波器滤除式(5)中的直流分量和频率为2ωh的分量,得到:
34、
35、tehbpf是经过带通滤波器后的电机转矩,再将上式再乘以sinωht,并经过滤波器处理后得:
36、
37、te0是最终经过滤波器含有电流矢量角的量,对比式(4)和式(7),可以发现te0正比于dte/dβ,通过pi调节器调节电流矢量角令dte/dβ为零,即可得到mtpa时的最佳电流角。
38、进一步,步骤1具体包含以下实施步骤:
39、步骤1.1:收集来自多种传感器的数据,包括电流传感器和位置传感器,这些传感器会捕捉电机的电流、位置和速度信息;
40、步骤1.2:对采集的数据进行预处理;
41、步骤1.3:提取有关电机性能的相关特征,包括电流波形的频谱特征、电机位置的角度特征;
42、步骤1.4:根据问题的性质,选择递归神经网络(rnn)算法对于时间序列数据和控制问题,其具体过程为:
43、输入数据:在每个时间步有以下输入数据:
44、电流数据:i(t)
45、位置数据:θ(t)
46、rnn模型:模型接受当前时间步的电流和位置信息,然后输出预测下一个时间步的电流注入策略,模型公式为:
47、输入层:x(t)=[i(t),θ(t)]
48、隐藏层:h(t)=tanh(wh*h(t-1)+wx*x(t)+bh)
49、输出层:y(t)=σ(wy*h(t)+by)
50、其中,wh、wx、wy是权重矩阵,bh、by是偏差项,σ是激活函数,采用sigmoid函数;y(t)为输出转矩te和参考电流矢量角β;
51、损失函数:通过定义一个损失函数为交叉熵损失函数,以测量模型预测的电流注入策略与实际电机性能的差异;
52、训练模型:使用训练数据集,通过反向传播算法来调整模型的权重和偏差,以最小化损失函数;
53、步骤1.5:将准备好的数据划分为训练集和测试集,然后使用训练集来训练机器学习模型,在这个过程中,模型将学习如何根据传感器数据来预测最佳的电流注入策略以实现mtpa控制;
54、步骤1.6:进行模型验证和优化,在测试集上验证模型的性能,并进行必要的调整和优化,以确保模型的准确性和鲁棒性,一旦训练好的模型准备就绪,将其部署到实际电机系统中,模型将实时接收传感器数据,并预测最佳的电流注入策略,以实现mtpa控制。
55、进一步,步骤2的具体实施过程如下:
56、步骤2.1:首先明确定义解决的问题,以及哪些参数需要估计,需要估计的参数具体包括:
57、电机的电感参数:电机的dq轴电感参数,包括d轴电感和q轴电感,这些参数会影响电机的动态响应;
58、控制器的增益参数:控制系统的速度控制器和mtpa控制器的增益参数,包括比例增益和积分增益;
59、观测器的参数:观测器模块中的参数,包括旋转坐标系下的dq轴电流和电机转速的观测器参数;
60、混合高斯模型的参数:如果控制系统采用混合高斯模型来描述某些随机性,那么混合高斯模型的参数,包括高斯分布的均值和方差,也可以是隐变量;
61、开关信号相关参数:与逆变器相关的参数,包括开关频率、占空比,也会影响系统的性能;
62、高频噪声参数:与高频噪声相关的参数,包括高频噪声的分布参数,以及分配高频噪声到不同频率的参数;
63、观测误差参数:观测器模块的误差参数,包括转子位置角和电流测量误差;
64、步骤2.2:收集必要的数据来进行估计,包括观测器模块输出的电机转子位置角、三相电流、速度;
65、步骤2.3:定义隐变量,隐变量是步骤2.1中需要估计的参数;假设有一组数据x={x1,x2,...,xn},这些数据来自一个混合高斯模型,模型包括k个高斯分布,目标是估计每个高斯分布的参数,包括均值μk和方差σk2,以及每个数据点属于每个高斯分布的概率:包括隐变量zik;
66、步骤2.4:初始化需要估计的参数;
67、步骤2.5:e步骤:在e步骤中,计算隐变量的后验分布,给定当前参数估计,这可以通过观测数据和当前参数的条件概率分布来完成,计算每个数据点属于每个高斯分布的概率zik,根据当前参数估计,使用贝叶斯公式:
68、
69、其中,πk是混合系数,表示数据点属于第k个高斯分布的先验概率,zik:这个符号表示数据点xi属于第k个高斯分布的概率,它是一个隐变量,表示数据点xi的分配情况,在e步骤中,它的计算表示了数据点对于每个高斯分布的归属度;
70、步骤2.6:m步骤:在m步骤中,根据e步骤得到的隐变量后验分布,更新参数的估计值;
71、
72、这通常涉及最大化一个似然函数,根据隐变量的期望值来实现;
73、重复e步骤和m步骤:重复e步骤和m步骤,直到参数的估计值收敛或达到预定的迭代次数,最终的参数估计可以用于控制系统的改进、优化,或者其他相关的应用。
74、本发明的有益效果为:
75、本发明将随机频率注入电机运行电流矢量角,产生一系列的激励信号;通过对信号的调制和解调,判断出mtpa控制的运行依据;根据mtpa参考控制电流角,生成参考电压矢量输出。本发明克服了电机参数随运行工况变化的影响,实现了内置式永磁电机mtpa的精确控制,并且本发明通过随机频率注入,显著降低了信号注入法对谐波和噪声的影响。
76、本发明的rnn用于预测电机的输出转矩te和参考电流矢量角β,有助于实现精确的电机控制,确保电机在不同负载和工作条件下保持稳定的运行,提高系统性能和效率。rnn用于mtpa控制可以用来预测和优化电机的最佳电流注入策略,以实现mtpa工作点。这有助于最大化电机的输出转矩,减少电流消耗,从而提高效率。em算法可能在该发明中用于解决参数估计问题。通过对隐变量的估计,可以提高对系统参数或电机特性的认识。通过更精确地估计控制系统的参数实现更优化的电机控制,更好地了解电机参数有助于减少能量损耗,提高系统效率。
- 还没有人留言评论。精彩留言会获得点赞!