一种永磁同步电机无位置传感器控制系统及方法与流程
本发明涉及永磁同步电机控制,具体涉及一种永磁同步电机无位置传感器控制系统及方法。
背景技术:
1、相比于感应电机,永磁同步电机具有功率密度高、效率高和功率因数高等优势,在电力传动尤其是高性能电力驱动领域已得到广泛应用。永磁同步电机高性能运行必须以来准确的转子位置反馈,常常采用光电码盘、旋转变压器等测量永磁同步电机的位置信号。但是在一些工况复杂环境,位置测量装置易损坏,位置测量信号易受到干扰。另一方面,在一些低成本应用场景下,为了节约成本,同时省去位置传感器。在这种情况下,需要依赖永磁同步电机采用无位置传感器的控制策略,即通过电机电压、电流信号来观测永磁同步电机的转子位置信号,用于电机控制。
2、因为永磁同步电机的反电势波形反映了电机转子信息,因此常常通过电机反电势来观测电机转子信息。但是,由于永磁同步电机在零低速时,电机的反电动势很小,难以准确稳定地提取电机反电动势。因此,为了解决永磁同步电机零低速时转子位置估计困难的问题,基于高频信号注入的零低速无位置控制方法得到充足发展。高频注入法有高频电压注入法和高频电流注入法,根据注入信号在电机模型坐标系中的位置不同,可以分为旋转高频注入法和脉振高频注入法。基于高频信号注入的无位置传感器控制方法,通过在电机中注入高频电压或电流信号,基于电机高频网络,产生高频响应信号。进而通过检测电机包含电机位置信息的高频电压和电流响应信号获取电机转子位置信息。但是传统的基于高频信号注入的无位置传感器控制方法不仅依赖较高的开关频率,注入高频信号的频率数值受开关频率影响较低,而且需要低通或高通滤波器来获取电机高频响应信号,常引起延迟和信号衰减问题。针对该问题,本发明提出了基于正交方波电压注入的三电平逆变器供电永磁同步电机无位置传感器控制方法,可以采用较低的开关频率,并且避免信号处理过程中低通滤波器的使用,减小了位置信号处理过程中的延迟效应,提高了转子位置观测精度。同时,高频电压注入无需考虑高频电流注入中信号跟踪性能,也降低了电流控制器设计的难度。
技术实现思路
1、针对现有技术中的上述不足,本发明提供了一种永磁同步电机无位置传感器控制系统及方法。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、第一方面,本发明提出了一种永磁同步电机无位置传感器控制系统,包括:
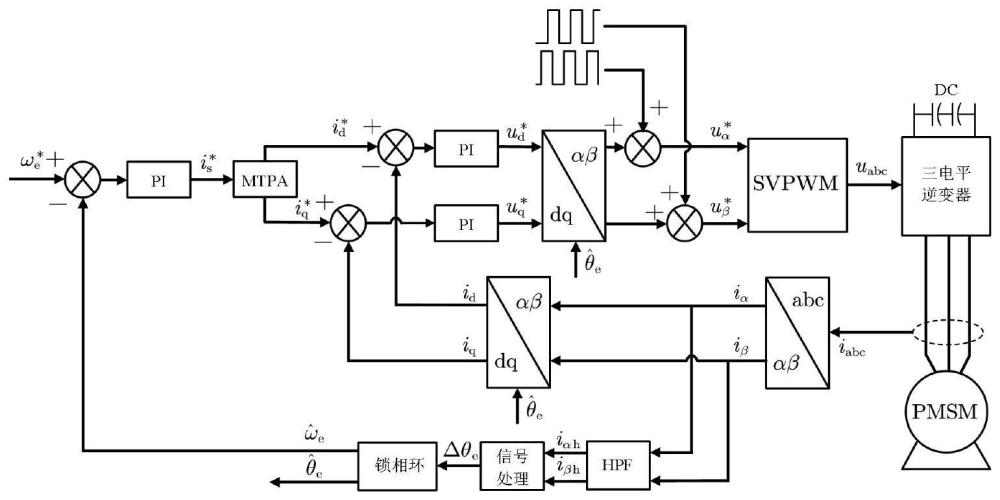
4、转速电流双闭环控制器,用于对输入的转速参考值和锁相环模块输出的转速观测值以及坐标变换模块输出的d-q轴电流值进行转速电流双闭环控制,输出α-β轴参考电压矢量;
5、高频正交方波注入模块,用于在两相静止坐标系处注入高频正交方波,将高频正交方波叠加在转速电流双闭环控制器输出的α-β轴参考电压矢量上;
6、空间矢量调制模块,用于对叠加高频正交方波的α-β轴参考电压矢量进行三电平空间矢量调制,输出三相驱动信号;
7、三相三电平逆变器,用于根据空间矢量调制模块输出的三相驱动信号,控制三相桥臂各个开关器件通断,对三相永磁同步电机进行无位置传感器控制;
8、坐标变换模块,用于接收三相永磁同步电机输出的三相电流,对三相电流进行坐标变换,输出当前时刻的d-q轴及α-β轴电流值;
9、高通滤波器模块,用于对坐标变换模块输出的当前时刻的α-β轴电流值进行高通滤波,输出高频电流信号;
10、高频信号处理模块,用于对高通滤波器模块输出的高频电流信号进行处理,得到包含转子位置信息的位置误差信号;
11、锁相环模块,用于对高频信号处理模块输出的包含转子位置信息的位置误差信号进行调节,得到转子位置观测值和转速观测值。
12、进一步地,所述高频正交方波注入模块在两相静止坐标系处注入高频正交方波时,在单采样单更新系统中,所注入高频正交方波的频率不超过采样频率的1/4;在双采样双更新系统中,所注入高频正交方波的频率不超过采样频率的1/2。
13、进一步地,所述高频正交方波注入模块在两相静止坐标系处注入高频正交方波时,所注入高频正交方波的幅值与频率呈正相关关系。
14、进一步地,所述高频正交方波注入模块在两相静止坐标系处注入高频正交方波时,采用随机频率注入的方式,按照一定周期切换所注入高频正交方波的频率,并且高频正交方波的幅值与频率的比值固定。
15、进一步地,所述高频信号处理模块对高通滤波器模块输出的高频电流信号进行处理,得到包含转子位置信息的位置误差信号,具体包括:
16、将当前时刻与前一时刻的高频电流信号相加,分离高频响应信号在离散域下的高频分量和包含转子位置信息的两倍基频分量,再对高频分量和两倍基频分量进行归一化操作和三角函数运算,得到包含转子位置信息的位置误差信号。
17、进一步地,所述转速电流双闭环控制器具体包括:
18、转速闭环pi控制器,用于对输入的转速参考值和锁相环模块输出的转速观测值进行转速闭环pi控制,输出电流矢量幅值参考值;
19、最大转矩电流比控制模块,用于对转速闭环pi控制器输出的电流矢量幅值参考值进行最大转矩电流比控制,输出d轴电流参考值和q轴电流参考值;
20、第一电流闭环pi控制器,用于对最大转矩电流比控制模块输出的d轴电流参考值进行电流闭环pi控制,输出d轴电压参考值;
21、第二电流闭环pi控制器,用于对最大转矩电流比控制模块输出的q轴电流参考值进行电流闭环pi控制,输出q轴电压参考值;
22、旋转变换模块,用于对第一电流闭环pi控制器输出的d轴电压参考值和第二电流闭环pi控制器输出的q轴电压参考值进行旋转变换,输出α-β轴参考电压矢量。
23、进一步地,所述最大转矩电流比控制模块对转速闭环pi控制器输出的电流矢量幅值参考值进行最大转矩电流比控制,输出d轴电流参考值和q轴电流参考值,具体为:
24、
25、
26、其中,为d轴电流参考值,为q轴电流参考值,ψf为永磁体磁链,ld、lq分别为d-q坐标系下直轴等效电感和交轴等效电感,为转速闭环pi控制器生成的电流矢量幅值参考值。
27、进一步地,所述锁相环模块对高频信号处理模块输出的包含转子位置信息的位置误差信号进行调节,得到转子位置观测值和转速观测值,具体为:
28、构建锁相环特征方程为:
29、
30、将特征方程的根配置在同一点进行简化,得到pid参数为:
31、kp3α
32、其中,s为拉普拉斯变换算子,kd为微分系数,p为电机极对数,kp为比例系数,j为电机转动惯量,ki为积分系数,α为极点。
33、第二方面,本发明提出了一种应用于上述系统的永磁同步电机无位置传感器控制方法,包括以下步骤:
34、s1、通过相电流传感器和直流母线电压传感器,获取相电流值和直流母线中点电位值;
35、s2、根据锁相环模块得到的转子位置观测值和转速观测值,通过转速闭环pi控制器及最大转矩电流比控制模块,获取d-q轴电流参考值;
36、s3、根据坐标变换模块得到的d-q轴电流值和最大转矩电流比控制模块得到的d-q轴电流参考值,通过第一电流闭环pi控制器和第二电流闭环pi控制器,获取d-q轴参考电压矢量;
37、s4、对d-q轴参考电压矢量进行旋转坐标变换,得到两相静止坐标系下的α-β轴参考电压矢量;
38、s5、采用三电平空间矢量调制算法对α-β轴参考电压矢量进行调制,得到三相驱动信号;
39、s6、利用三相驱动信号控制三相桥臂各个开关器件通断,对三相永磁同步电机进行无位置传感器控制。
40、本发明具有以下有益效果:
41、(1)本发明通过高频正交方波注入的无位置传感器控制方法,可以满足其重载启动的动态性能和稳态精度的要求,实现无位置传感器的大转矩带载启动;
42、(2)本发明通过高频正交方波注入的无位置传感器控制方法,使用随机频率注入的形式,降低了高频信号的等效幅值,可以有效降低高频噪声;
43、(3)本发明通过高频正交方波注入的无位置传感器控制方法,在高频信号处理过程中,不使用低通滤波器,提高了位置观测精度和动态性能;
44、(4)本发明通过高频正交方波注入的无位置传感器控制方法,使用一种基于电机运动学方程的带有负载转矩前馈的pid控制器作为锁相环,提高了位置观测的动态性能。
- 还没有人留言评论。精彩留言会获得点赞!