一种航线自适应转换多机型适用的线路巡检方法及系统与流程
本发明涉及电力线路运维,具体为一种航线自适应转换多机型适用的线路巡检方法。
背景技术:
1、在电力线路巡检的领域,近年来随着技术的发展,智能化、自动化和数字化的趋势日益明显,特别是无人机(uav)技术的引入,为电力线路的巡检工作带来了革命性的改变,无人机巡检技术以其高效率、低成本和灵活性,成为电力线路巡检的重要工具,极大地推动了电力线路运维工作的智能化和自动化,无人机巡检相比传统的人工巡检方式,具有显著的优势,首先,无人机能够快速覆盖大面积的电力线路,对于遥远或地形复杂的区域尤为有效。其次,无人机搭载的高清摄像头和传感器可以捕捉到高质量的影像和数据,有助于及时发现和定位电力线路的潜在问题,从而提前进行维护和修复,降低了故障风险,此外,无人机巡检还显著降低了人力成本和安全风险,尤其是在高压线路和难以接近的地区,然而,随着无人机技术的快速发展和应用,也出现了一些新的挑战,一个主要的问题是,无人机的迭代升级和机型更换速度非常快,不同厂家和型号的无人机在接口和操作系统上存在差异,这导致了移动终端(如控制器和数据处理系统)很难与多种机型的无人机兼容,电力公司或巡检服务提供商需要为不同的无人机型号配置多种移动终端,增加了设备成本和操作复杂性,另一个关键问题是航线格式的不兼容性,不同机型的无人机通常使用不同的航线格式,这意味着现有的航线数据往往无法直接应用于新机型,因此,每当引入新的无人机机型时,都需要重新规划航线,这不仅增加了人力资源的投入,也延长了巡检准备的时间,此外,航线规划本身是一个复杂的过程,需要考虑到各种飞行参数和地理环境因素,对操作人员的专业知识和经验要求较高。
技术实现思路
1、鉴于上述存在的问题,提出了本发明。
2、因此,本发明解决的技术问题是:现有的电力线路巡检方法存在兼容性较差,操作复杂,人力成本较高,以及如何适配多种机型且航线自动转换的优化问题。
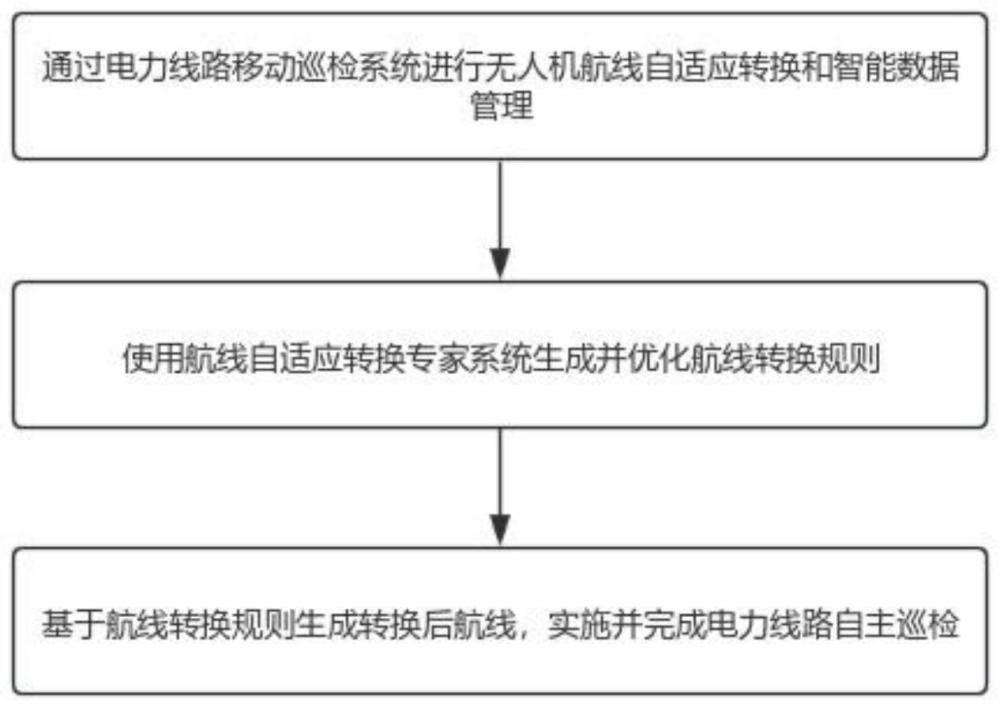
3、为解决上述技术问题,本发明提供如下技术方案:一种航线自适应转换多机型适用的线路巡检方法,包括通过电力线路移动巡检系统进行无人机航线自适应转换和智能数据管理;使用航线自适应转换专家系统生成并优化航线转换规则;基于航线转换规则生成转换后航线,实施并完成电力线路自主巡检。
4、作为本发明所述的航线自适应转换多机型适用的线路巡检方法的一种优选方案,其中:所述电力线路移动巡检系统包括接口单元和主应用单元,接口单元轮询式调用不同机型接口库与无人机进行连接,当与无人机连接成功时,获取无人机型号并确定接口库版本,向主应用单元发送无人机型号和接口库版本的消息,主应用单元接收到无人机型号和接口库版本后执行系统配置文件,调用与机型适配的应用入口运行主程序,自动跳转至与机型适配的应用界面,完成机型的适配使用。
5、作为本发明所述的航线自适应转换多机型适用的线路巡检方法的一种优选方案,其中:所述电力线路移动巡检系统还包括网络传输单元和航线转换单元,使用者在电力线路移动巡检系统的巡检任务界面通过网络传输单元从无人机管控平台获取使用者的巡检工单列表,在巡检工单列表中点击巡检工单,通过网络传输单元从无人机管控平台下载当前工单的巡检航线,航线转换单元对下载的航线与当前连接的无人机型号校对并使用基于航线自适应转换专家系统对航线的格式和内容属性参数进行转换。
6、作为本发明所述的航线自适应转换多机型适用的线路巡检方法的一种优选方案,其中:所述航线自适应转换专家系统包括在人机接口输入每种塔型使用不同机型巡检的实用航线,输入每种型号无人机的参数特性,通过人机接口获取航线点数、航点拍摄部位名称、航点属性值、无人机不同属性范围值和限值的知识数据,转换数据形式并存入知识库,知识库结合每种机型属性参数的特性差异及对每种塔型进行巡检时的特性差异产生航线转换规则,并通过知识数据不断优化转换规则。
7、作为本发明所述的航线自适应转换多机型适用的线路巡检方法的一种优选方案,其中:所述航线转换规则包括通过格式转换规则,系统配置格式映射文件,从接口模块获取连接的机型代入映射关系,得到输出的格式,格式转换函数表示为:
8、
9、其中,fi为航线转换前的格式,m(fi)为航线转换后的格式,m为映射关系函数,若输入格式与输出格式相同则不进行格式转换,若输入格式与输出格式不同,则进行格式转换,通过坐标转换规则适配使用的属性参数,使用wgs84坐标系和c2000坐标系之间的互转方法进行坐标数据转换,坐标转换函数表示为:
10、c(clat,clon)=(f(clat),g(clon))
11、其中,clat,clon分别为纬度和经度坐标,若坐标系相同则不进行转换,通过高度转换规则适配使用的属性参数,使用椭球高和海拔高之间的互转方法实现高度数据转换,高度转换函数表示为:
12、
13、其中,hi为输入高度,ho为输出高度,若高程系相同则不进行转换。
14、作为本发明所述的航线自适应转换多机型适用的线路巡检方法的一种优选方案,其中:所述航线转换规则还包括通过数值型转换规则适配使用的属性参数,计算加权平均值,表示为:
15、
16、其中,a,b分别为积分上下限,n为归一化系数,p(x)为属性参数函数,δ(x)为权重因子函数,数值型参数转换函数表示为:
17、
18、其中,pi为输入属性参数值,pmin,pmax分别为属性参数的样本最小值和最大值,通过枚举型转换规则,比较输入属性参数值是否在输出属性参数范围值内,枚举型转换函数表示为:
19、
20、其中,ei为输入枚举型参数值集合,eo为输出枚举型参数值集合,ed为默认值,用于替换不在输出枚举型参数值集合中的输入值,n为枚举型参数值的数量,若输入属性参数值在输出属性参数范围值内则不进行转换,若输入属性参数值不在输出属性参数范围值内,则使用输出属性参数的默认值作为转换后数值。
21、作为本发明所述的航线自适应转换多机型适用的线路巡检方法的一种优选方案,其中:所述完成电力线路自主巡检包括基于知识库的航线转换规则生成转换后的航线,记录航线转换的过程和步骤及转换结果,形成反馈机制优化航线转换规则,电力线路移动巡检系统将转换后的航线上传至无人机终端,实施并完成电力线路自主巡检,电力线路移动巡检系统保存线路自主巡检结果,通过网络传输单元向无人机管控平台上传巡检结果。
22、本发明的另外一个目的是提供一种航线自适应转换多机型适用的线路巡检系统,其能通过巡检系统模块对不同机型无人机进行应用程序适配,解决了目前的不同无人机机型间接口不兼容的问题。
23、作为本发明所述的航线自适应转换多机型适用的线路巡检系统的一种优选方案,其中:包括巡检系统模块、航线转换模块、自主巡检模块;所述巡检系统模块用于确保电力线路移动巡检系统能够与各种无人机机型连接并适配;所述航线转换模块用于获取并存储航线的属性参数,结合不同机型和塔型的特性差异产生航线转换规则;所述自主巡检模块基于航线转换规则生成转换后的航线,并通过无人机实施电力线路自主巡检。
24、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序是实现航线自适应转换多机型适用的线路巡检方法的步骤。
25、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现航线自适应转换多机型适用的线路巡检方法的步骤。
26、本发明的有益效果:本发明提供的航线自适应转换多机型适用的线路巡检方法对所有无人机机型适配,解决了不同厂家机型无法兼容的问题,使得电力巡检运维人员在使用不同机型时,避免了需要安装多个移动终端,并对当前所有无人机机型用到的航线格式和内容属性参数做到自适应适配转换,解决了大量存量航线无法适配其他机型造成需要耗费大量人力进行重新规划航线的问题,当出现电量不足、机器故障等问题时若现场无相同机型可就地更换其他可用机型继续进行巡检,无需根据机型重新规划路线,解决现场巡检任务紧张,场地来回偏远,更换同类机型耗时过长的问题,有效提高巡检效率,本发明在人力成本、巡检耗时和巡检效率方面都取得更加良好的效果。
- 还没有人留言评论。精彩留言会获得点赞!