异步电机静态参数辨识方法与流程
本发明属于电机参数辨识,尤其涉及一种异步电机静态参数辨识方法。
背景技术:
1、异步电机结构简单、成本低、广泛应用于电气传动领域。随着变频器的发展及在调速和节能方面的优势,新的、不同的应用场合对电机控制性能提出了更高的要求,矢量控制技术被广大用户所认可。
2、矢量控制基于电机数学模型,依赖电机参数,电机参数不准,会严重降低控制性能。目前识别电机参数的异步离线辨识方法中,离线参数辨识是指在电机运行之前,对其施加一系列激励信号,通过检测电机响应来获得电机的相关参数。一般通用控制器的电机参数自整定功能采用的都是传统的离线辨识方法,需要对电机进行堵转试验和空转试验,但对于部分特定工作环境、大功率电机、特别是高压电机而言,上述两个实验都难以进行。
3、如公开号为cn102710209a的中国发明申请公开的交流异步电机离线静态参数辨识方法,其通过直流伏安法测得定子电阻,通过堵转试验计算出定子电感、转子电感和转子电阻,然后基于工程经验公式计算出空载电流、直流磁化时间和消磁时间。该方法的实现需要基于较高的采样计算速率与fft算法,在实际的工程应用中,fft算法程序占用计算资源严重,导致中断时间加长或中断溢出,不利于工程化实现。另外,公告号为cn108183647b的中国发明专利公开了通过向电机输入两组不同频率的单相交流电流,采样电机输入端的电压电流,然后进行fft分析计算电机输入端的阻抗的实部与虚部,然后通过等效电路反算出电机的参数。同样依赖fft算法来取得电机等效电路的功率因数角,从而进行等效电路的参数计算,同时,需要增加异步电机输入端的电压传感器,增加系统成本,也不利于工程化实现。
技术实现思路
1、本发明旨在解决上述技术问题之一,提出一种异步电机静态参数辨识方法,该方法基于二阶广义积分器对施加的交流电压矢量进行定向,然后对电流坐标变换获得了参数辨识需要的功率因数角,相比传统的fft算法,能够节省有效控制芯片的计算资源,而且具有较高的辨识精度,有利于工程化实现,具有较高的工程应用价值。
2、为了实现上述目的,本发明提供了一种异步电机静态参数辨识方法,包括以下步骤:
3、定子电阻辨识步骤:向异步电机的任意两相绕组注入第一直流电流及第二直流电流,依据直流实验辨识出定子电阻rs;
4、转子电阻与定转子漏感辨识步骤:
5、向异步电机的任意两相绕组施加单相固定频率的第一交流激励信号,并在该激励信号达到稳态时,获取所述异步电机的定子电压us以及定子电流is;
6、所述定子电压us经过二阶广义积分器以及锁相环获得施加的激励信号的相位角θ,基于该相位角θ获得旋转坐标系下定子电流的d轴、q轴直流电流分量id、iq,并根据id、iq获得功率因数角
7、根据us、is、功率因数角定子电阻rs以及等效电路计算转子电阻rr以及定子漏感lls以及转子漏感llr。
8、本技术方案在转子电阻与定转子漏感辨识步骤中,利用二阶广义积分器产生激励信号的交流电压矢量的正交分量,然后通过锁相环pll将电压矢量定位于旋转坐标系的d轴,从而获得施加的激励信号的交流电压矢量的角度即相位角,基于该相位角对电机电流进行分解即可获得d轴、q轴直流电流分量即电流的有功分量与无功分量,从而获得此时回路的功率因数角。本方法中功率因数角的获取避免了只能在通入三相交流电下才能完成的一些参数辨识工作,能够有效降低静态参数辨识对控制器采样、计算能力等方面的要求,具有较高的工程应用价值。
9、本技术其他一些实施例中,异步电机静态参数辨识方法还包括互感辨识步骤:向异步电机的任意两相绕组施加单相低频的第二交流激励信号,并在该激励信号达到稳态时,根据等效电路计算等效阻抗req与等效感抗xeq,并根据该激励信号下的功率因数角定子电阻rs、转子电阻rr以及所述等效阻抗、等效感抗计算互感。
10、本技术方案在电机的互感辨识中,仍基于二阶广义积分器以及锁相环pll从而获得施加的相应的单相交流电压矢量的角度,并基于该角度对电机电流进行分解获得此时回路的功率因数角,此时,对系统等效电路进行分析,即可计算出回路的等效阻抗与等效感抗,当施加激励信号的频率较低时,系统回路的感抗主要来自于互感,阻抗来自于定转子电阻,从而可以实现在电机处于静止条件下对电机互感进行辨识,方法简单且辨识精度高。
11、本技术其他一些实施例中,所述定子电阻辨识步骤中,在注入所述第一直流电流记录所述异步电机的第一输出电压u1及第一输出电流i1,并在注入所述第二直流电流时记录所述异步电机的第二输出电压u2及第二输出电流i2;
12、依据直流实验辨识出定子电阻rs:
13、
14、其中,rs为所述定子电阻。
15、本技术方案中通过直流实验辨识出定子电阻,辨识步骤简单且方便操作。
16、本技术其他一些实施例中,所述转子电阻与定转子漏感辨识步骤中:
17、所述定子电压us经过所述二阶广义积分器产生正交分量uα、uβ,其中,
18、
19、所述uα、uβ经过所述锁相环获得所述相位角θ,所述定子电流is经过所述二阶广义积分器产生正交分量iα、iβ,根据iα、iβ计算以相位角θ为基础的同步旋转坐标系下的所述id、iq,并根据获得功率因数角。
20、本技术方案中功率因数角获取过程能够有效降低静态参数辨识对控制器采样、计算能力等方面的要求,具有较高的工程应用价值。
21、本技术其他一些实施例中,计算所述转子电阻以及定转子漏感包括:所述等效电路为t型等效电路,根据所述t型等效电路可根据下式获得等效阻抗与等效感抗:
22、
23、其中,单相固定频率为电机额定频率时,lr≈lm,ωlm远大于定子电阻、转子电阻与漏抗,将其带入式(1)可得式(2):
24、
25、根据所述功率因数角,可由下式(3)计算等效阻抗与等效电抗:
26、
27、其中,rr为转子电阻,req为等效阻抗,xeq为等效感抗,leq为等效电抗,lls为定子漏感,ωn=2π*fn*kc,fn为电机额定频率,kc为激励信号的频率比例系数,ω为所施加的单相的交流激励信号对应的角频率,根据等效阻抗与定子电阻可计算得出转子电阻,llr为转子漏感,lr为转子电感,根据式(3)以及lls=llr=leq/2计算定转子漏感。
28、本技术其他一些实施例中,所述互感辨识步骤中,当施加单相低频的第二交流激励信号时,定转子漏抗约等于零,在第二交流激励信号达到稳态时,获取所述异步电机的定子电压us以及定子电流is,根据所述转子电阻与定转子漏感辨识步骤中的方式获得在第二交流激励信号下回路的功率因数角,并根据下式(4)计算互感lm:
29、
30、其中,req为等效阻抗,xeq为感抗,rr为转子电阻,lls为定子漏感,llr为转子漏感,rr为转子电阻,lls为定子漏感,llr为转子漏感,lr为转子电感,ω为对应所施加的单相的交流激励信号对应的角频率。
31、本技术其他一些实施例中,所述第一直流电流的目标值为0.5in,所述第二直流电流的目标值为0.8in,其中,in为所述异步电机的额定电流,通过调节电流环pi控制电流稳定在目标值,并在两次到达目标值后分别记录实际电压所述u1、u2以及相应的电流所述i1与i2。
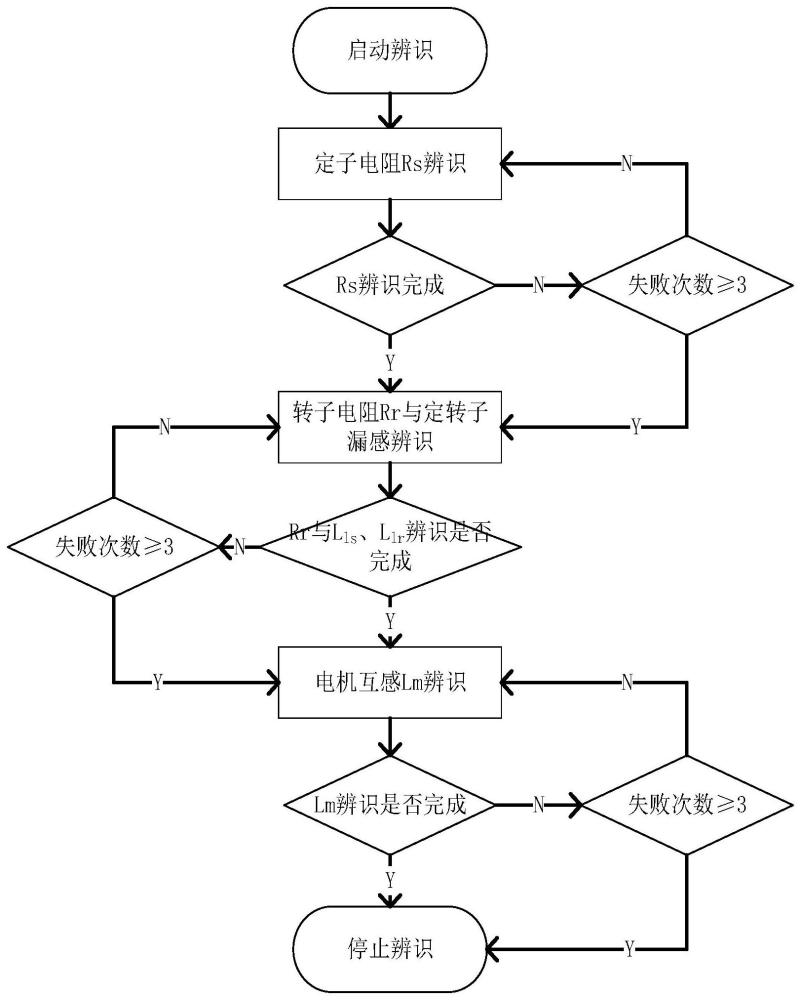
32、本技术其他一些实施例中,所述辨识方法执行时,首先进行所述定子电阻辨识步骤,根据辨识结果与所述异步电机的铭牌值的误差范围判别本次辨识是否完成,若完成则执行转子电阻与定转子漏感辨识步骤,若未完成,则判别辨识失败次数是否满足预设条件,若未满足预设条件,则继续执行所述定子电阻辨识步骤,否则,则跳过本步骤执行转子电阻与定转子漏感辨识步骤。
33、本技术其他一些实施例中,所述转子电阻与定转子漏感辨识执行时,根据辨识结果与所述异步电机的铭牌值的误差范围判别本次辨识是否完成,若完成则执行互感辨识步骤,若未完成,则判别辨识失败次数是否满足预设条件,若未满足预设条件,则继续执行本步骤,否则,则跳过本步骤执行互感辨识步骤。
34、本技术其他一些实施例中,执行互感辨识步骤时,根据辨识结果与所述异步电机的铭牌值的误差范围判别本次辨识是否完成,若完成则停止辨识;若未完成,则判别辨识失败次数是否满足预设条件,若未满足预设条件,则继续执行本步骤,否则,则停止辨识并汇总辨识成功参数进行显示。
- 还没有人留言评论。精彩留言会获得点赞!