一种无刷电机驱动器快速制动控制电路的制作方法
本发明属于电机快速制动控制电路,具体涉及一种全数字直流无刷电机驱动器。
背景技术:
1、电机是电动执行机构的动力来源。目前,电动执行机构的电机普通采用的是单相交流伺服电机和三相鼠笼感应电机。电动执行机构一旦投入运行后,电机将长期在频繁可逆运转状态下工作。所以要求电机的起动转矩大,起动电流要小,特别是转动惯量要小,以保证执行机构按控制信号快速、准确定位。电机的转动惯量是决定电动执行机构定位精度的关键因素之一,电机转动惯量小,执行机构定位精度就高,电机转动惯量越大,定位精度就越低。这是因为电机转子具有惯性,执行机构运行到预定位置后,电机虽然已断电,但电机还会转动一定时间才能停止,造成电动执行机构惯性惰走,执行机构基本误差加大。执行机构用在闭环调节时,由于惯性惰走还会造成系统振荡。电机断电后阻止电机转动,使之减速或停转的措施称为制动。
2、目前国内、外电动执行机构的减速机效率低,所配电机功率大。随着工业生产要求电动执行机构输出力矩的增大,电机也随之加大,电机转动惯量与要求执行机构快速精准定位的矛盾更加突出。长期以来为减小执行机构惯性惰走,提高执行机构精度采取了多种措施,当前解决这一问题较为有效的办法是克服电机的惯性,在电机上采取制动措施。
3、根据电机工作状态和使用要求不同,电机的制动方式有多种多样,但归纳为:机械制动和电气制动两大类。机械制动常用的方法是电磁抱闸式。它是利用电磁抱闸等机械构件,在电机通电时,电磁铁的吸力克服弹簧力,通过杠杆等传动件,将制动抱闸与连接在电机转子上的制动轮分开,电机转动。当电机断电后,靠弹簧力将制动轮抱住,使电机停转。
4、电磁抱闸式电机制动器控制电路是无刷电机驱动器的一个重要组成部分,它的主要功能是完成无刷电机的制动控制功能。
5、现有电机电磁抱闸式电机制动器控制电路比较简单,一般通过继电器触点控制+24v电源来,可以满足一般情况下电机制动的要求,但电机转动惯量较大时,制动距离大,电机的定位精度就低,对系统的性能带来影响。
技术实现思路
1、本发明的目的在于提供一种无刷电机驱动器快速制动控制电路。
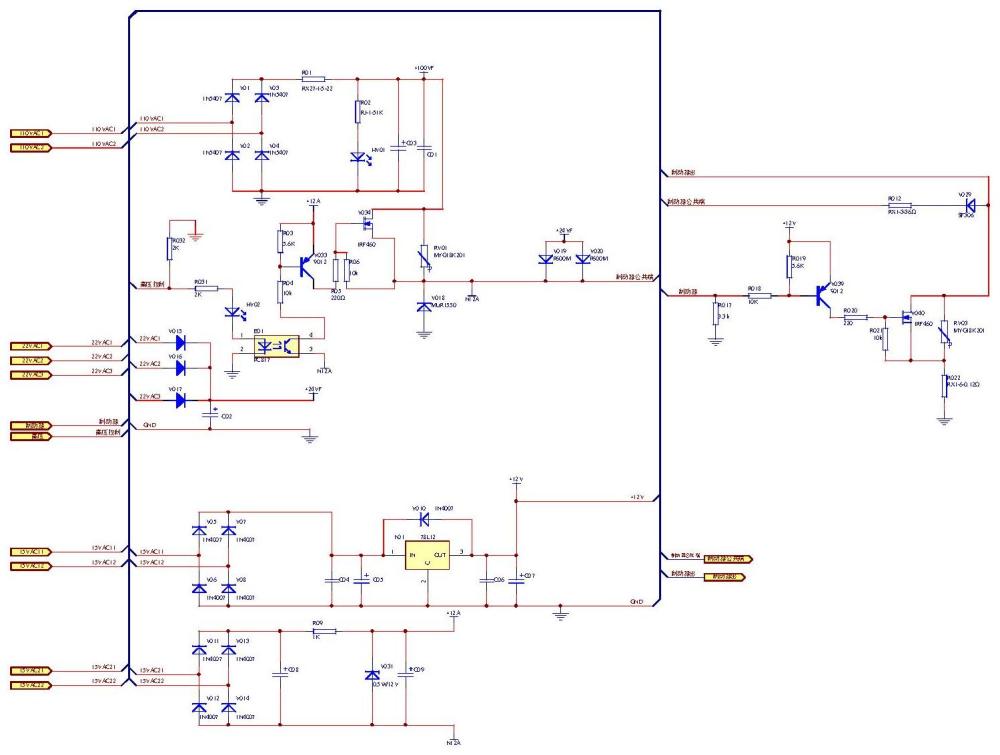
2、实现本发明的技术方案如下:一种无刷电机驱动器快速制动控制电路,包括+12v稳压直流电源转换电路、+12va非稳压直流电源转换电路,+24vf低压非稳压直流电源转换电路、+100vf高压非稳压直流电源转换电路、高压电源输出控制电路和制动器输出控制电路,其中:
3、高压电源输出控制电路包括第三电阻r031、第四电阻r032、第二发光二极管hv02、第一光电耦合器b01、第五电阻r04、第六电阻r03、第一三极管v033、第七电阻器r05、第八电阻器r06、第一场效应管v034、第一压敏电阻rv01、第一快恢复二极管v018、第十七二极管v019、第十八二极管v020;所述第三电阻r031的一端接高压控制端,第三电阻r031的一端同时接第四电阻r032的一端,第四电阻r032的另一端接gnd端,第三电阻r031的另一端接第二发光二极管hv02的正端,第二发光二极管hv02的负端接第一光电耦合器b01的1脚,第一光电耦合器b01的2脚接gnd端,第一光电耦合器b01的3脚接n12a端,第一光电耦合器b01的4脚接第五电阻r04的一端,第五电阻r04的另一端接第一三极管v033的基极,第一三极管v033的基极同时接第六电阻r03的一端,第六电阻r03的另一端接第一三极管v033的发射极,第一三极管v033的发射极同时接+12a端,第一三极管v033的集电极接第七电阻器r05的一端,第七电阻器r05的另一端接第八电阻器r06的一端,第八电阻器r06的一端同时第一场效应管v034的栅极,第八电阻器r06的另一端接第一场效应管v034的源极,第一场效应管v034的源极接制动器公共端,第一场效应管v034的漏极接+100vf端,第一压敏电阻rv01的一端接第一场效应管v034的漏极,第一压敏电阻rv01的另一端接第一场效应管v034的源极,第一快恢复二极管v018的负端接第一场效应管v034的源极,第一快恢复二极管v018的正端接gnd端,+24vf端接第十七二极管v019和第十八二极管v020的正端,第十七二极管v019和第十八二极管v020的负端接制动器公共端,制动器公共端接n12a;
4、制动器输出控制电路包括第九电阻r017、第十电阻r018、第十一电阻r019、第二三极管v039、第十二电阻r020、第十三电阻r021、第二场效应管v040、第二压敏电阻rv03、第十九二极管v029、第十四电阻r012、第十五电阻r022;所述第十电阻r018的一端接制动器控制端,第十电阻r018的一端同时接第九电阻r017的一端,第九电阻r017的另一端接gnd端,第十电阻r018的另一端接第二三极管v039的基极,第二三极管v039的基极同时接第十一电阻r019的一端,第十一电阻r019的另一端接第二三极管v039的发射极,第二三极管v039的发射极同时接+12v端,第二三极管v039的集电极接第十二电阻r020的一端,第十二电阻r020的另一端接第十三电阻r021的一端,第十三电阻r021的一端同时第二场效应管v040的栅极,第十三电阻r021的另一端接第一场效应管v040的源极,第二场效应管v040的源极接第十五电阻r022的一端,第十五电阻r022的另一端接gnd端,第二场效应管v040的漏极接制动器输出端,第二压敏电阻rv03的一端接第二场效应管v040的漏极,第二压敏电阻rv03的另一端接第二场效应管v040的源极,第十九二极管v029的正端接第二场效应管v040的漏极,第十九二极管v029的负端接第十四电阻r012的一端,第十四电阻r012的另一端接制动器公共端。
5、进一步的,所述无刷电机驱动器快速制动控制电路开始工作时,制动器控制端为+12vgnd时,第二三极管v039饱和导通,在第二场效应管v040的栅源间施加+12v电压时,第二场效应管v040的漏源间导通,当第二场效应管v040的源端连接+12vgnd时,第二场效应管v040的漏端电压为+12vgnd,此时制动器出端电压为+12vgnd;同时高压控制控制端施加持续时间为100ms的+12v电压,即高压控制有效,第二发光二极管hv02亮,光耦b01导通,进一步第一三极管v033饱和导通,再进一步第一场效应管v034的漏源间导通,此时制动器公共端为+100vf高压,在制动器两端就施加了+100vf高压,100ms后高压控制控制端施加的+12v电压撤销,第二发光二极管hv02熄灭,光耦b01截止,进一步第一三极管v033截止,再进一步第一场效应管v034的漏源间高阻,此时制动器公共端通过第十七二极管v019、第十八二极管v020隔离后为+24vf电压,在制动器两端就施加了+24vf低压,这样就实现了制动器两端的高低压控制,实现了无刷电机快速制动的目的;当制动器控制信号为+12v时,第二三极管v039及第二场效应管v040截止,制动器出端电压悬空,制动无效。
6、进一步的,+12v稳压直流电源转换电路包括第一二极管v05、第二二极管v06、第三二极管v07、第四二极管v08、第一电容c04、第二电容c05、直流稳压块n01、第五二极管v010、第三电容c06、第四电容c07;所述第一二极管v05的正端接15vac11端,第一二极管v05的正端同时接第二二极管v06的负端,第一二极管v05的负端接第三二极管v07的负端,第三二极管v07的负端接第一电容c04和第二电容c05的正端,第三二极管v07的负端同时接直流稳压块n01的输入端,第三二极管v07的正端接15vac12端,第三二极管v07的正端同时接第四二极管v08的负端,第二二极管v06的正端接第四二极管v08的正端,第四二极管v08的正端接第一电容c04和第二电容c05的负端,第一电容c04和第二电容c05的负端接直流稳压块n01的接地端,直流稳压块n01的输出端接第三电容c06和第四电容c07的负端,第五二极管v010的负端接直流稳压块n01的输入端,第五二极管v010的正端接直流稳压块n01的输出端,最后直流稳压块n01的输出端接+12v端,第三电容c06和第四电容c07的负端接gnd端,+12v端和gnd端供制动器输出控制电路用。
7、进一步的,+12va非稳压直流电源转换电路,包括第六二极管v011、第七二极管v012、第八二极管v013、第九二极管v014、第一电阻器r09、第五电容c08、第六电容c09、直流稳压管v031;所述第六二极管v011的正端接15vac21端,第六二极管v011的正端同时接第七二极管v012的负端,第六二极管v011的负端接第八二极管v013的负端,第八二极管v013的负端接第五电容c08和第一电阻器r09的一端,第一电阻器r09的另一端接直流稳压管v031的负端,第八二极管v013的正端接15vac22端,第八二极管v013的正端同时接第九二极管v014的负端,第七二极管v012的正端接第九二极管v014的正端,第九二极管v014的正端接第五电容c08的负端,第五电容c08的负端接直流稳压管v013的正端,直流稳压管v031的负端接第六电容c09的正端,最后第六电容c09的正端接+12va端,第六电容c09的负端接n12a端,+12va端和n12a端供高压电源输出控制电路用。
8、进一步的,24vf低压非稳压直流电源转换电路,包括第十二极管v015、第十一二极管v016、第十二二极管v017、第七电容c02;所述第十二极管v015的正端接22vac1端,第十一二极管v016的正端接22vac2端,第十二二极管v017的正端接22vac3端,第十二极管v015的负端接第十一二极管v016的负端,第十一二极管v016的负端接第十二二极管v017的负端,第十二二极管v017的负端接第七电容c02的正端,最后第七电容c02的正端接+24vf端,第七电容c02的负端接gnd端,+24vf端和gnd端供高压电源输出控制电路用。
9、进一步的,+100vf非稳压直流电源转换电路,包括第十三二极管v01、第十四二极管v02、第十五二极管v03、第十六二极管v04、第二电阻器r01、第三电阻器r02、第一发光二极管hv01、第八电容c03、第九电容c01;所述第十三二极管v01的正端接100vac1端,第十三二极管v01的正端同时接第十四二极管v02的负端,第十三二极管v01的负端接第十五二极管v03的负端,第十五二极管v03的负端接第二电阻器r01的一端,第二电阻器r01的另一端接第三电阻器r02的一端,第三电阻器r02的另一端接第一发光二极管hv01的正端,第二电阻器r01的另一端接第八电容c03的正端,第八电容c03的正端接第九电容c01的一端,第十五二极管v03的正端接100vac2端,第十五二极管v03的正端同时接第十六二极管v04的负端,第十四二极管v02的正端接第十六二极管v04的正端,第十六二极管v04的正端接第一发光二极管hv01的负端,第一发光二极管hv01的负端接第八电容c03的负端,第八电容c03的负端接第九电容c01的另一端,最后第八电容c03的的正端接+100vf端,第八电容c03的负端接gnd端,+100vf端和gnd端供高压电源输出控制电路用。
10、本发明与现有技术相比,其显著优点在于:利用场效应管实现无刷电机的制动控制功能,可以在电磁抱闸式电机制动器两端施加瞬间高压和低压相结合的方式来实现高速电机制动,特别在电机转动惯量较大时,可以缩短制动距离,提高电机的定位精度,提高系统的整体性能。
- 还没有人留言评论。精彩留言会获得点赞!