一种永磁同步电机伺服驱动系统的随机SVPWM方法及系统与流程
本发明属于电机驱动控制,涉及一种永磁同步电机伺服驱动系统的空间矢量脉宽调制方法。
背景技术:
1、电机伺服控制系统在当今社会许多领域、特别是在一些高端行业中拥有不可替代的地位,如数控机床、电驱动汽车、航空航天飞行器以及军事武装设备等。电机伺服控制系统的广泛应用离不开多项核心技术的不断进步,现代电力电子技术和电机制造技术更是为其迅速发展奠定了十分重要的基础。在电机伺服系统被大规模采用的同时,人们对其性能也提出了更高的要求,控制精度高、响应速度快、调速范围宽等目标是当下伺服系统研究的重点。
2、永磁同步电机(pmsm)是由原先的绕线转子同步电机发展而来,用具有较强抗退磁性的永磁体代替同步电机的绕线式转子;同时,pmsm还取消了电刷结构,为其带来了体积小、质量轻、功率密度高、且运行效率高等优点。鉴于pmsm的诸多优势,对响应速度、位置精度以及速度稳定性要求较高的场合中多采用以pmsm为执行机构的伺服控制系统。
3、目前,最常用的pmsm控制方法之一是矢量控制,它的核心是将pmsm的三相定子电流经过坐标变换解耦为励磁分量与转矩分量并分别进行闭环控制。以这两个电流分量对应的clark两相静止坐标系下α-β轴电压矢量作为空间矢量脉宽调制(svpwm)模块的参考输入,通过svpwm模块计算每个开关周期内的三相逆变器开关器件占空比,使得电机实际生成定子磁链尽可能跟踪目标圆形磁链,最终成功实现pmsm的准确、快速控制。然而经过相关研究发现,在传统svpwm技术中,其开关频率是保持不变的,因此在pmsm输出电压、电流的频谱中,开关频率及其整数倍附近存在较多谐波,其产生的电磁噪声和干扰,不仅影响了硬件系统的稳定性,造成电机控制的准确性、可靠性下降,限制了pmsm伺服驱动系统在上述一些高精尖领域的应用,而且还会对人们的健康造成一定的危害。
4、随机svpwm技术的诞生为改善pmsm伺服驱动系统的电磁干扰问题提供了一个新的方法。该技术在特定范围内将随机开关函数的可变参数进行随机化,从而使输出电压与电流的高频段频谱分布更加均匀,达到削弱高次谐波峰值的目的。该技术将逆变器的驱动信号直接进行改善,能在保持原有拓扑结构不变、避免增加硬件成本的前提下使高次谐波的幅值显著降低,从而显著地改善电磁噪声与干扰的问题,提高了系统emc,具有重要的研究与应用价值。目前对随机调制技术的研究主要集中在算法本身,通过对比不同扩频范围的传统rsf-svpwm策略引起的谐波分散效果,至于将此策略应用于实际pmsm伺服驱动系统中时,开关频率的变化是否会对pmsm伺服驱动系统的各种性能产生影响,还需要进一步研究。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供了一种pmsm伺服驱动系统的基于双分频带的随机开关频率svpwm方法,将一个完整的开关频率变化范围分成了两个对称的分频带,使得每一时刻的开关频率围绕一个分频带局部中心点进行随机化,可以达到与较大扩频范围的传统rsf-svpwm策略一般的谐波分散效果,更大程度地削弱高次谐波幅值,同时对pmsm伺服系统电流环及稳态输出性能的不利影响又与同样±10%扩频范围的传统rsf-svpwm策略差别不大,最终提高pmsm伺服驱动系统emc、且兼顾了系统其他方面的良好性能,具有一定的优越性。
2、本发明的技术解决方案是:一种永磁同步电机伺服驱动系统的随机svpwm方法,包括:
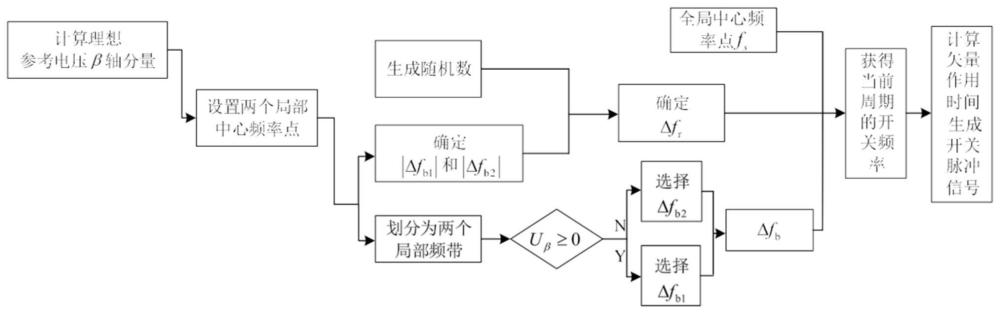
3、确定永磁同步电机的三相绕组电压在clark两相静止坐标系下α-β轴理想电压矢量uβ;
4、根据uβ的正负将一个完整的开关频率变化范围分成左右两个对称的分频带;
5、配置两个分频带内的中心偏置频率与随机频率,并按照各自的中心频率点以及随机频率,在两个分频带内分别进行随机化;所述的中心偏置频率代表分频带的频率中心点偏离全局中心点fs的程度,随机频率为分频带上、下限频率差值的一半;
6、根据随机数生成方法,在随机频率范围内确定任一个周期内两个分频带的开关频率随机变化值δf,将该开关频率随机变化值δf与中心偏置频率值δfb结合,计算获取下一开关周期随机后的开关频率值f;
7、按照开关频率值f得到开关周期,计算开关周期内参考电压矢量uref所处扇区,求得合成参考电压矢量uref的基本电压矢量的作用时间,由此产生逆变器各相开关的脉冲信号。
8、进一步的,所述的左右两个对称的分频带,当uβ≥0时,开关频率以fs1为变化中心,频率范围为[fs1-δf1,fs1+δf1];当uβ<0时,开关频率以fs2为变化中心,频率范围为[fs2-δf2,fs2+δf2]。
9、进一步的,所述的开关频率fs1和开关频率fs2在全局中心点fs左右两边保持对称。
10、进一步的,所述的中心偏置频率的取值区间为:
11、
12、其中,δf为总体开关频率变化范围,f0为基波频率。
13、进一步的,所述的计算获取下一开关周期随机后的开关频率值f,具体为:
14、当uβ≥0时,下一周期开关频率值为
15、f=fs-δfb+δf
16、当uβ<0时,下一周期开关频率值为
17、f=fs+δfb+δf
18、其中,δfb为中心偏置频率,fs为一个完整的开关频率变化范围的全局中心频率。
19、一种永磁同步电机伺服驱动系统的随机svpwm系统,包括电压确定模块、频率划分模块、频率配置模块、频率生成模块、脉冲信号产生模块,其中:
20、电压确定模块:用于确定永磁同步电机的三相绕组电压在clark两相静止坐标系下α-β轴理想电压矢量uβ;
21、频率划分模块:根据uβ的正负将一个完整的开关频率变化范围分成左右两个对称的分频带;
22、频率配置模块:配置两个分频带内的中心偏置频率与随机频率,并按照各自的中心频率点以及随机频率,在两个分频带内分别进行随机化;所述的中心偏置频率代表分频带的频率中心点偏离全局中心点fs的程度,随机频率为分频带上、下限频率差值的一半;
23、频率生成模块:根据随机数生成方法,在随机频率范围内确定任一个周期内两个分频带的开关频率随机变化值δf,将该开关频率随机变化值δf与中心偏置频率值δfb结合,计算获取下一开关周期随机后的开关频率值f;
24、脉冲信号产生模块:用于按照开关频率值f得到开关周期,计算开关周期内参考电压矢量uref所处扇区,求得合成参考电压矢量uref的基本电压矢量的作用时间,由此产生逆变器各相开关的脉冲信号。
25、进一步的,所述的频率划分模块:根据uβ的正负将一个完整的开关频率变化范围分成左右两个对称的分频带,具体为:当uβ≥0时,开关频率以fs1为变化中心,频率范围为[fs1-δf1,fs1+δf1];当uβ<0时,开关频率以fs2为变化中心,频率范围为[fs2-δf2,fs2+δf2]。
26、进一步的,所述的开关频率fs1和开关频率fs2在全局中心点fs左右两边保持对称。
27、进一步的,所述的中心偏置频率的取值区间为:
28、
29、其中,δf为总体开关频率变化范围,f0为基波频率。
30、进一步的,所述的频率生成模块计算获取下一开关周期随机后的开关频率值f,具体为:
31、当uβ≥0时,下一周期开关频率值为
32、f=fs-δfb+δf
33、当uβ<0时,下一周期开关频率值为
34、f=fs+δfb+δf
35、其中,δfb为中心偏置频率,fs为所述完整的开关频率变化范围的全局中心频率。
36、本发明与现有技术相比的优点在于:
37、(1)本技术提出的新型随机开关频率svpwm方法将原本连续的完整变化范围划成两个分频带,使开关频率在各分频带内分别进行随机化,进一步降低了高次谐波峰值;
38、(2)本发明随机开关频率svpwm方法因扩频范围较小,对电流环稳态性能的影响较小,与同样为±10%扩频范围的传统rsf-svpwm产生的影响几乎相当,引起的电流脉动小于±40%扩频范围的传统rsf-svpwm策略,本发明因扩频范围较小而使其对电流环稳态性能的负面影响保持在较低的程度;
39、(3)本发明方法提高了pmsm伺服驱动系统emc,且兼顾了系统其他方面的良好性能,具有一定的优越性;
40、(4)本发明方法是基于离散控制系统进行设计的,特别适用于数字控制系统。
- 还没有人留言评论。精彩留言会获得点赞!