一种电动断路器底盘车的控制方法和系统与流程
本发明涉及高压开关试验设备,尤其涉及一种电动断路器底盘车的控制方法和系统。
背景技术:
1、中置式开关设备在中压开关行业是主流产品,其断路器推入断路器室后处于试验位置,需要通过旋转断路器的底盘车的丝杆,将断路器摇进运行位置,之后才能正常运行。
2、现有技术有两种,一种是人工通过近距离转动手摇底盘车的把手转动底盘车的内置螺旋杆把断路器移动到运行位置,同时在手动移动过程中,上下隔离到自动连接到母线。另一种是在中置柜内部安装电动底盘车,通过电动底盘车操作断路器定速移动到运行位置,并且堵转后停止。由于自动化的迅速发展,手动操作逐渐被自动操作代替,即使断路器底盘车的改造,其机械结构也没发生多大变化,主要是电机驱动螺杆的运行;
3、目前市场上底盘车驱动运行方式的特点:匀速前进或者后退,堵转停止;这种运行方式存在的缺点:整个变电站和配电房在投运后母线绝大部分不会停电,当断路器中上下隔离刀距离带电母线约近时,整个断路器中上下隔离刀中距离带电母线越近,有带电磁力产生阻止断路器向前运行的力,靠的越近,磁阻越大,如果依然匀速运行,会产生设备带电拉弧时间长,增加运行危险系数。同时,断路器运行中出现阻力时或者是机械结构问题出现堵转,电机是停止运行并报警,在断路器距离小于带电母线安全距离内堵转,相当于断路器处于带电状态,如果此时出现非接触拉弧,会增加开关本身不安全系数。
技术实现思路
1、本发明提供了一种电动断路器底盘车的控制方法和系统,解决了现有的底盘车驱动运行方式无法实现自动变速,若是一直匀速运行,会存在运行危险,同时,若是在堵转情况下出现非接触拉弧,会增加开关本身不安全系数的技术问题。
2、本发明第一方面提供的一种电动断路器底盘车的控制方法,包括:
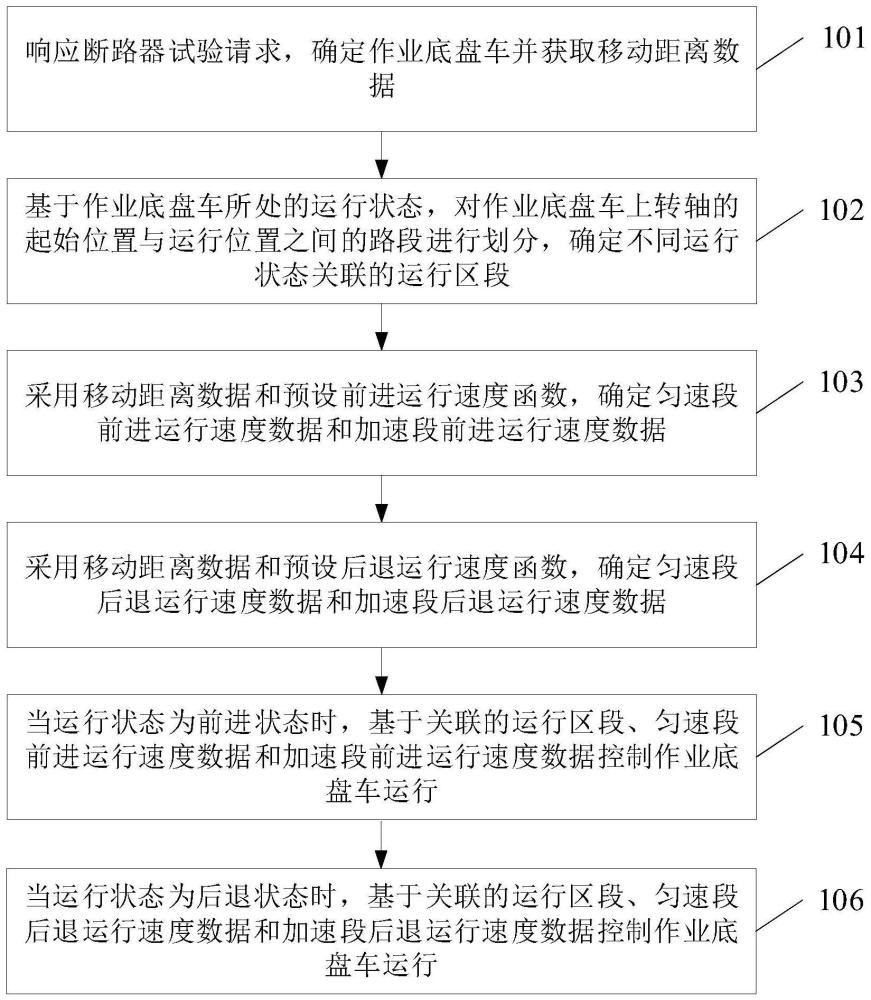
3、响应断路器试验请求,确定作业底盘车并获取移动距离数据;
4、基于所述作业底盘车所处的运行状态,对所述作业底盘车上转轴的起始位置与运行位置之间的路段进行划分,确定不同所述运行状态关联的运行区段;
5、采用所述移动距离数据和预设前进运行速度函数,确定匀速段前进运行速度数据和加速段前进运行速度数据;
6、采用所述移动距离数据和预设后退运行速度函数,确定匀速段后退运行速度数据和加速段后退运行速度数据;
7、当所述运行状态为前进状态时,基于关联的所述运行区段、所述匀速段前进运行速度数据和所述加速段前进运行速度数据控制所述作业底盘车运行;
8、当所述运行状态为后退状态时,基于关联的所述运行区段、所述匀速段后退运行速度数据和所述加速段后退运行速度数据控制所述作业底盘车运行。
9、可选地,所述移动距离数据为转轴在所述作业底盘车上的起始位置与运行位置之间的距离值。
10、可选地,所述基于所述作业底盘车所处的运行状态,对所述作业底盘车上转轴的起始位置与运行位置之间的路段进行划分,确定不同所述运行状态关联的运行区段的步骤,包括:
11、当所述作业底盘车处于前进状态时,以所述作业底盘车上的起始位置为起点,将所述起始位置与预设分段位置之间的路段作为前进匀速段;
12、将所述预设分段位置与所述运行位置之间的路段作为前进加速段;
13、当所述作业底盘车处于后退状态时,以所述作业底盘车上的所述运行位置为起点,将所述运行位置与所述预设分段位置之间的路段作为后退加速段;
14、将所述预设分段位置与所述起始位置之间的路段作为后退匀速段。
15、可选地,所述预设前进运行速度函数包括匀速段前进运行速度函数和加速段前进运行速度函数,所述采用所述移动距离数据和预设前进运行速度函数,确定匀速段前进运行速度数据和加速段前进运行速度数据的步骤,包括:
16、采用所述移动距离数据输入所述匀速段前进运行速度函数,生成匀速段前进运行速度数据;
17、所述匀速段前进运行速度函数的表达式为:
18、
19、式中,v1表示所述匀速段前进运行速度数据,l表示所述移动距离数据;
20、采用所述移动距离数据输入所述加速段前进运行速度函数,生成加速段前进运行速度数据;
21、所述加速段前进运行速度函数的表达式为:
22、
23、式中,v2表示所述加速段前进运行速度数据。
24、可选地,所述预设后退运行速度函数包括匀速段后退运行速度函数和加速段后退运行速度函数,所述采用所述移动距离数据和预设后退运行速度函数,确定匀速段后退运行速度数据和加速段后退运行速度数据的步骤,包括:
25、采用所述移动距离数据输入所述匀速段后退运行速度函数,生成匀速段后退运行速度数据;
26、所述匀速段后退运行速度函数的表达式为:
27、
28、式中,v3表示所述匀速段后退运行速度数据;
29、采用所述移动距离数据输入所述加速段后退运行速度函数,生成加速段后退运行速度数据;
30、所述加速段后退运行速度函数的表达式为:
31、
32、式中,v4表示所述加速段后退运行速度数据。
33、可选地,所述前进状态关联的所述运行区段包括所述前进匀速段和所述前进加速段,所述当所述运行状态为前进状态时,基于关联的所述运行区段、所述匀速段前进运行速度数据和所述加速段前进运行速度数据控制所述作业底盘车运行的步骤,包括:
34、当所述运行状态为前进状态时,确定所述转轴在所述作业底盘车上当前时刻的前进位置;
35、当所述前进位置处于所述前进匀速段时,根据所述匀速段前进运行速度数据控制所述作业底盘车上的所述转轴匀速前进;
36、当所述前进位置处于所述前进加速段时,根据所述加速段前进运行速度数据控制所述作业底盘车上的所述转轴加速前进。
37、可选地,所述后退状态关联的所述运行区段包括所述后退加速段和所述后退匀速段,所述当所述运行状态为后退状态时,基于关联的所述运行区段、所述匀速段后退运行速度数据和所述加速段后退运行速度数据控制所述作业底盘车运行的步骤,包括:
38、当所述运行状态为后退状态时,确定所述转轴在所述作业底盘车上当前时刻的后退位置;
39、当所述后退位置处于所述后退加速段,根据所述加速段后退运行速度数据控制所述作业底盘车上的所述转轴加速后退;
40、当所述后退位置处于所述后退匀速段,根据所述匀速段后退运行速度数据控制所述作业底盘车上的所述转轴匀速后退。
41、可选地,还包括:
42、当所述运行状态为所述前进状态时,确定所述转轴在所述作业底盘车上当前时刻的前进堵转位置;
43、当所述前进堵转位置处于所述前进匀速段,则控制所述作业底盘车停止运行并输出第一报警信号;
44、当所述前进堵转位置处于所述前进加速段,采用所述移动距离数据输入预设加速段前进堵转速度函数,生成加速段前进堵转速度数据;
45、所述预设加速段前进堵转速度函数的表达式为:
46、
47、式中,v5表示所述加速段前进堵转速度数据;
48、根据所述加速段前进堵转速度数据控制所述作业底盘车上的所述转轴加速后退预设第一距离并输出第二报警信号。
49、可选地,还包括:
50、当所述运行状态为所述后退状态时,确定所述转轴在所述作业底盘车上当前时刻的后退堵转位置;
51、当所述后退堵转位置处于所述后退匀速段,则控制所述作业底盘车停止运行并输出第三报警信号;
52、当所述后退堵转位置处于所述后退加速段,采用所述移动距离数据输入预设加速段后退堵转速度函数,生成加速段后退堵转速度数据;
53、所述预设加速段后退堵转速度函数的表达式为:
54、
55、式中,v6表示所述加速段后退堵转速度数据;
56、根据所述加速段后退堵转速度数据控制所述作业底盘车上的所述转轴向所述运行位置加速前进,并输出第四报警信号。
57、本发明第二方面提供的一种电动断路器底盘车的控制系统,包括:
58、响应模块,用于响应断路器试验请求,确定作业底盘车并获取移动距离数据;
59、区段划分模块,用于基于所述作业底盘车所处的运行状态,对所述作业底盘车上转轴的起始位置与运行位置之间的路段进行划分,确定不同所述运行状态关联的运行区段;
60、前进运行速度数据模块,用于采用所述移动距离数据和预设前进运行速度函数,确定匀速段前进运行速度数据和加速段前进运行速度数据;
61、后退运行速度数据模块,用于采用所述移动距离数据和预设后退运行速度函数,确定匀速段后退运行速度数据和加速段后退运行速度数据;
62、第一运行模块,用于当所述运行状态为前进状态时,基于关联的所述运行区段、所述匀速段前进运行速度数据和所述加速段前进运行速度数据控制所述作业底盘车运行;
63、第二运行模块,用于当所述运行状态为后退状态时,基于关联的所述运行区段、所述匀速段后退运行速度数据和所述加速段后退运行速度数据控制所述作业底盘车运行。
64、从以上技术方案可以看出,本发明具有以下优点:
65、响应断路器试验请求,确定作业底盘车并获取移动距离数据,基于作业底盘车所处的运行状态,对作业底盘车上转轴的起始位置与运行位置之间的路段进行划分,确定不同运行状态关联的运行区段,采用移动距离数据和预设前进运行速度函数,确定匀速段前进运行速度数据和加速段前进运行速度数据,采用移动距离数据和预设后退运行速度函数,确定匀速段后退运行速度数据和加速段后退运行速度数据,当运行状态为前进状态时,基于关联的运行区段、匀速段前进运行速度数据和加速段前进运行速度数据控制作业底盘车运行,当运行状态为后退状态时,基于关联的运行区段、匀速段后退运行速度数据和加速段后退运行速度数据控制作业底盘车运行;解决了现有的底盘车驱动运行方式无法实现自动变速,若是一直匀速运行,会存在运行危险,同时,若是在堵转情况下出现非接触拉弧,会增加开关本身不安全系数的技术问题;通过模拟人工手动摇螺杆,实现底盘车自动控制不同速度进行摇进或摇出作业,能够保证设备在移动过程中的试验人员的人身安全。同时,当出现堵转现象时,能够根据不同的情况分别进行处理和报警,能够解决近距离拉弧问题,进而保证设备在移动过程中的试验人员对故障精准定位和试验人员的人身安全。
- 还没有人留言评论。精彩留言会获得点赞!