电机控制方法、装置及计算机可读存储介质与流程
本技术涉及电机控制,尤其涉及一种电机控制方法、装置及计算机可读存储介质。
背景技术:
1、电机因具有效率高、转矩密度高,以及响应速度快等优点,在风力发电、电动汽车以及数控机床等高性能伺服驱动场合得到了广泛的应用。电机控制系统多采用三闭环控制,内环为电流环,中间环为速度环,外环为位置环。电流环作为控制系统的最内环,是伺服系统能否实现高精密控制的关键环节。
2、电机由于受到本体非理想因素和逆变器非线性因素的影响,电机电流中存在大量谐波,同时在电机的实际运行中,负载扰动也会影响电流谐波含量。这些谐波会导致电机产生过多的损耗和较大的转速波动。
3、相关技术中,通过预测电流控制方法可以快速精确跟踪到电流,但是预测控制依赖于精确的系统数学模型。当模型不准确或者参数失配时,电机控制系统会产生扰动导致电流跟踪精度和谐波抑制效果下降,进而导致电机控制系统的稳定性降低。
技术实现思路
1、本技术实施例通过提供一种电机控制方法、装置及计算机可读存储介质,旨在对电机的电流谐波进行抑制,降低电机损耗和电机转速波动,提高电机控制系统的稳定性。
2、本技术实施例提供了一种电机控制方法,所述电机控制方法,用于电机控制系统,包括:
3、根据电机的实际转速和q轴实际电流,确定q轴负载扰动补偿电流;
4、根据所述q轴负载扰动补偿电流补偿q轴给定电流,并确定补偿后的q轴给定电流与所述q轴实际电流之间的q轴电流误差;
5、根据所述q轴电流误差确定q轴给定电压;
6、根据所述q轴给定电压和d轴给定电压,控制逆变器输出所述电机的驱动信号。
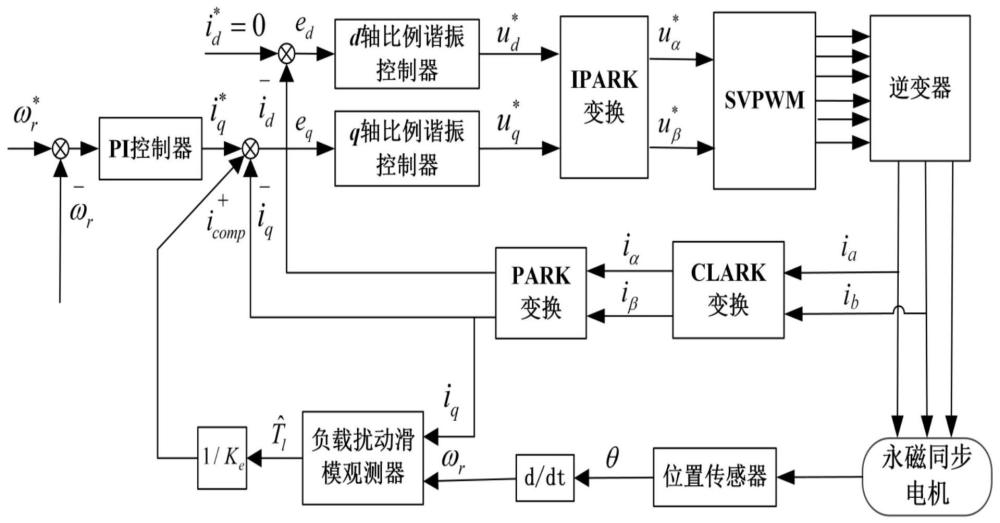
7、可选地,所述电机控制系统包括:负载扰动滑模观测器和增益算子模块,所述根据电机的实际转速和q轴实际电流,确定q轴负载扰动补偿电流的步骤包括:
8、将电机的实际转速和q轴实际电流输入所述负载扰动滑模观测器,得到负载转矩观测值;
9、将所述负载转矩观测值输入所述增益算子模块进行计算,得到所述q轴负载扰动补偿电流。
10、可选地,所述将电机的实际转速和q轴实际电流输入所述负载扰动滑模观测器,得到负载转矩观测值的步骤包括:
11、将所述电机的实际转速和q轴实际电流输入负载扰动滑模观测器,基于所述负载扰动滑模观测器中的滑模控制函数进行计算,得到所述负载转矩观测值,其中,所述负载扰动滑模观测器表示为:
12、
13、其中,ts表示控制周期,ke表示转矩系数,j为转动惯量,iq表示q轴实际电流,b为阻力摩擦系数,k表示滑模系数,为实际转速的观测值,表示负载转矩tl的负载转矩观测值,vsmf表示滑模控制函数,所述滑模控制函数表示为:
14、
15、其中,λ代表趋近律参数,s为滑模面。
16、可选地,所述将所述负载转矩观测值输入所述增益算子模块进行计算,得到所述q轴负载扰动补偿电流的步骤包括:
17、将所述负载转矩观测值输入所述增益算子模块,基于所述增益算子模块中的增益算子计算得到所述q轴负载扰动补偿电流,其中,所述增益算子表示为:
18、
19、其中,ke为转矩系数,为负载转矩观测值。
20、可选地,所述电机控制系统还包括:速度环控制器,所述根据所述q轴负载扰动补偿电流补偿q轴给定电流,并确定补偿后的q轴给定电流与所述q轴实际电流之间的q轴电流误差的步骤之前,还包括:
21、获取所述电机的给定速度;
22、根据所述给定速度和所述电机的实际速度,确定速度差值;
23、将所述速度差值输入所述速度环控制器,得到所述q轴给定电流。
24、可选地,所述电机控制系统还包括:q轴比例谐振控制器,所述根据所述q轴电流误差确定q轴给定电压的步骤包括:
25、将所述q轴电流误差输入所述q轴比例谐振控制器,根据所述q轴电流误差和传递函数计算得到所述q轴给定电压,其中,所述q轴给定电压对应的计算公式表示为:
26、
27、其中,eq为q轴电流误差,gpr(s)为传递函数。
28、可选地,所述电机控制系统还包括:d轴比例谐振控制器,所述根据所述q轴给定电压和d轴给定电压,控制逆变器输出所述电机的驱动信号的步骤之前,还包括:
29、获取d轴给定电流和d轴实际电流;
30、根据所述d轴给定电流和所述d轴实际电流确定d轴电流误差;
31、将所述d轴电流误差输入所述d轴比例谐振控制器,根据所述d轴电流误差和传递函数计算得到所述d轴给定电压,其中,所述d轴给定电压对应的计算公式表示为:
32、
33、其中,ed为q轴电流误差,gpr(s)为传递函数。
34、可选地,所述传递函数表示为:
35、
36、其中,kpr为比例系数,kir为谐振系数,ωc为带宽,ωn为谐振频率。
37、可选地,所述电机控制系统还包括:ipark变换模块和svpwm模块,所述根据所述q轴给定电压和d轴给定电压,控制逆变器输出所述电机的驱动信号的步骤包括:
38、将d轴给定电压和所述q轴给定电压输入ipark变换模块,得到两相坐标系下的α轴给定电压和β轴给定电压;
39、将所述α轴给定电压和所述β轴给定电压输入svpwm模块,得到空间矢量电压信号;
40、将所述空间矢量电压信号输入逆变器,得到所述电机的驱动信号。
41、可选地,所述电机控制系统还包括:clark变换模块和park变换模块,所述根据电机的实际转速和q轴实际电流,确定q轴负载扰动补偿电流的步骤之前,还包括:
42、获取逆变器在三相坐标系下的三相交流;
43、将所述三相交流输入clark变换模块,得到两相坐标系下的α轴电流和β轴电流;
44、将所述α轴电流和所述β轴电流经过park变换模块,得到旋转d-q坐标系下的d轴实际电流和q轴实际电流。
45、此外,为实现上述目的,本技术还提供了一种电机控制装置,所述电机控制装置包括:
46、负载扰动补偿电流确定模块,用于根据电机的实际转速和q轴实际电流,确定q轴负载扰动补偿电流;
47、q轴电流误差确定模块,用于根据所述q轴负载扰动补偿电流补偿q轴给定电流,并确定补偿后的q轴给定电流与所述q轴实际电流之间的q轴电流误差;
48、q轴给定电压确定模块,用于根据所述q轴电流误差确定q轴给定电压;
49、驱动信号确定模块,用于根据所述q轴给定电压和d轴给定电压,控制逆变器输出所述电机的驱动信号。
50、此外,为实现上述目的,本技术还提供了一种计算机可读存储介质,其上存储有电机控制程序,所述电机控制程序被处理器执行时实现上述的电机控制方法的步骤。
51、本技术实施例中提供的一种电机控制方法、装置及计算机可读存储介质的技术方案,根据电机的实际转速和q轴实际电流,确定q轴负载扰动补偿电流,通过q轴负载扰动补偿电流对q轴给定电流进行补偿,以减小q轴实际电流和q轴给定电流之间的误差,能够降低负载扰动对电机电流谐波含量的影响,使得最终得到的电机的驱动信号更加准确。
- 还没有人留言评论。精彩留言会获得点赞!