一种伺服电机驱动方法、装置、介质、处理器及伺服系统与流程
本发明涉及机械控制领域,特别是涉及一种伺服电机驱动方法、装置、介质、处理器及伺服系统。
背景技术:
1、随着交流伺服系统应用的日趋广泛,工业生产线上的自动化装配、加工过程中,往往要求末端执行机构(本申请也称为末端执行器、机械末端)具备较强的快速定位能力。但是由于末端执行器的柔性连接,导致其在运动结束后出现长时间的残余振动,并且高速、高加速运动的情况下更为明显,大幅降低了末端执行器的定位精度和收敛速度,甚至会影响伺服系统的稳定性。同时,一些末端执行器抓取工件的质量或惯量变化,会导致残余振动的频率发生变化。
技术实现思路
1、有鉴如此,本发明与解决的讲述问题是提供一种伺服电机驱动方法、装置、介质、处理器及伺服系统,至少在一定程度上能解决上述现有技术问题的不足。
2、作为本发明的第一个方面,所提供的伺服电机驱动方法的实施例如下:
3、一种伺服电机驱动方法,包括如下步骤:
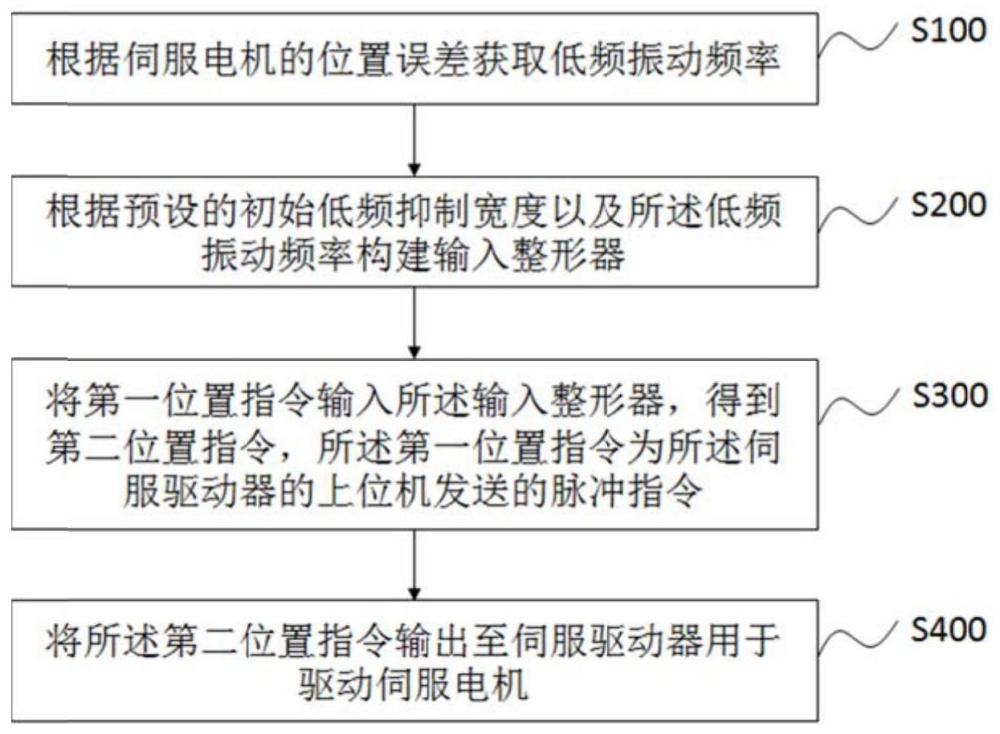
4、根据伺服电机的位置误差获取低频振动频率;
5、根据预设的初始低频抑制宽度以及所述低频振动频率构建输入整形器;
6、将第一位置指令输入所述输入整形器,得到第二位置指令,所述第一位置指令为所述伺服驱动器的上位机发送的脉冲指令;
7、将所述第二位置指令输出至伺服驱动器用于驱动伺服电机;
8、其中,所述输入整形器能产生一系列不同幅值和时滞时间的脉冲序列,使得所述第一位置指令与所述脉冲序列进行卷积后得到的第二位置指令能抑制机械末端的残余振动。
9、进一步地,所述根据伺服电机的位置误差获取低频振动频率,包括:
10、根据所述第一位置指令确定所述伺服驱动器的位置误差;
11、根据所述位置误差确定振荡正弦波;
12、根据所述振荡正弦波至少两个顶点之间的时间差确定振动周期;
13、根据所述振动周期确定所述低频振动频率。
14、进一步地,所述根据所述第一位置指令确定所述伺服驱动器的位置误差包括:
15、所述第一位置指令采用增量式给定,其计算公式为:ref=refpos-refposlast,其中:ref为当前时刻的第一位置指令,refpos为当前时刻位置指令的绝对值,refposlast为上一时刻位置指令的绝对值;
16、第一位置指令的反馈采用增量式给定,其计算公式为:fdb=fdbpos-fdbposlast,其中:fdb为当前时刻第一位置指令的反馈,fdbpos为当前时刻位置指令的反馈的绝对值,fdbposlast为上一时刻第一位置指令的反馈的绝对值;
17、所述位置误差计算公式为:err=ref-fdb+errlast;其中:err为当前时刻的位置误差,errlast为上一时刻的位置误差。
18、进一步地,所述根据所述振荡正弦波至少两个顶点之间的时间差确定振动周期,包括:
19、通过所述上位机的示波器手动测量所述振荡正弦波至少两个顶点之间的时间差,从而确定所述振动周期;
20、或者通过程序自动识别所述振荡正弦波顶点,并对至少两个顶点之间的时间差进行计时,从而获得所述振动周期,其中所述自动识别所述振荡正弦波顶点包括:将所述振荡正弦波某个点对应的时刻作为当前时刻,记录当前时刻位置误差、上一时刻的位置误差,以及上上一时刻的位置误差,当上一时刻的位置误差的绝对值同时大于当前时刻位置误差的绝对值和上上一时刻的位置误差的绝对值时,对应的上一时刻为所述振荡正弦波顶点时刻。
21、进一步地,所述根据所述振动周期确定所述低频振动频率,包括:
22、根据多个所述振动周期确定多个振动频率;
23、当多个所述振动频率皆在预设低频范围内,且多个所述振动频率之间的差值在预设偏差范围内时,计算多个所述振动频率的平均值,将所述平均值确定为所述低频振动频率。
24、优选地,所述输入整形器为zv输入整形器。
25、作为本发明的第二个方面,所提供的伺服电机驱动装置的实施例如下:
26、一种伺服电机驱动装置,包括如下模块:
27、获取模块,用于根据伺服电机的位置误差获取低频振动频率;
28、构建模块,用于根据预设的初始低频抑制宽度以及所述低频振动频率构建输入整形器;
29、处理模块,用于将第一位置指令输入所述输入整形器,得到第二位置指令,所述第一位置指令为所述伺服驱动器的上位机发送的脉冲指令;
30、输出模块,用于将所述第二位置指令输出至伺服驱动器用于驱动伺服电机;
31、其中,所述输入整形器能产生一系列不同幅值和时滞时间的脉冲序列,使得所述第一位置指令与所述脉冲序列进行卷积后得到的第二位置指令能抑制机械末端的残余振动。
32、作为本发明的第三个方面,所提供的计算机可读存储介质的实施例如下:
33、一种计算机可读存储介质,其中,所述计算机可读存储介质存储有计算机程序,所述计算机程序运行时执行上述第一个方面中任一项所述方法。
34、作为本发明的第四个方面,所提供的处理器的实施例如下:
35、一种处理器,其中,所述处理器用于运行程序,其中,所述程序运行时执行上述第一个方面中任一项所述方法。
36、作为本发明的第五个方面,所提供的伺服系统的实施例如下:
37、一种伺服系统,其中,包括上述第二个方面中所述伺服电机驱动装置。
38、采用本申请实施例,具有如下有益效果:
39、本申请能够根据预设的初始低频抑制宽度以及获取的低频振动频率构建输入整形器,将伺服驱动器的上位机发送的第一位置指令整形后输出第二位置指令至伺服驱动器用于驱动伺服电机,其中的输入整形器能产生一系列不同幅值和时滞时间的脉冲序列,使得第一位置指令与脉冲序列进行卷积后得到的第二位置指令能抑制机械末端的残余振动,从而使得本发明的实施例能主动抑制机械末端的能量输出,有效抑制机械末端的低频振动的同时提高机械负载的定位时间。
40、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明。应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种伺服电机驱动方法,其特征在于,包括如下步骤:
2.根据权利要求1所述伺服电机驱动方法,其特征在于,所述根据伺服电机的位置误差获取低频振动频率,包括:
3.根据权利要求2所述伺服电机驱动方法,其特征在于,所述根据所述第一位置指令确定所述伺服驱动器的位置误差包括:
4.根据权利要求2所述伺服电机驱动方法,其特征在于,所述根据所述振荡正弦波至少两个顶点之间的时间差确定振动周期,包括:
5.根据权利要求2所述伺服电机驱动方法,其特征在于,所述根据所述振动周期确定所述低频振动频率,包括:
6.根据权利要求1所述伺服电机驱动方法,其特征在于,所述输入整形器为zv输入整形器。
7.一种伺服电机驱动装置,其特征在于,包括如下模块:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序运行时执行权利要求1到6中任一项所述方法。
9.一种处理器,其特征在于,所述处理器用于运行程序,其中,所述程序运行时执行权利要求1至6中任意一项所述的方法。
10.一种伺服系统,其特征在于,包括权利要求7所述伺服电机驱动装置。
技术总结
本发明涉及一种伺服电机驱动方法、装置、介质、处理器及伺服电机驱动系统。其中伺服电机驱动方法包括如下步骤:根据伺服电机的位置误差获取低频振动频率;根据预设的初始低频抑制宽度以及所述低频振动频率构建输入整形器;将第一位置指令输入所述输入整形器,得到第二位置指令,所述第一位置指令为所述伺服驱动器的上位机发送的脉冲指令;将所述第二位置指令输出至伺服驱动器用于驱动伺服电机;其中,所述输入整形器能产生一系列不同幅值和时滞时间的脉冲序列,使得所述第一位置指令与所述脉冲序列进行卷积后得到的第二位置指令能抑制机械末端的残余振动。本申请能够在不增加指令响应的情况下,快速、有效地抑制机械末端的低频振动。
技术研发人员:李金安,尹智群
受保护的技术使用者:广州金升阳科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!