一种电机控制系统的转速观测方法与流程
本发明涉及电机控制,尤其涉及一种电机控制系统的转速观测方法。
背景技术:
1、电机控制系统中编码器的作用是测量电机的转速和位置,将这些信息反馈给控制器,从而实现精准控制。编码器可以通过检测电机轴的旋转角度、转速以及转向等参数,将数据传输给控制器,控制器再根据这些数据进行调节,控制电机的运行。在闭环控制系统中,编码器通常与电机轴直接连接,当电机转动时,编码器会不断地输出脉冲信号,每个脉冲信号对应电机轴的一个微小移动,通过计数这些脉冲信号就可以得出电机的位置和转速信息。控制器通过对编码器输出的脉冲信号进行解码并计算,可以精确地掌握电机的位置和转速,并进一步控制电机的运行状态。总之,编码器在电机控制中起到了精准测量电机位置和转速的作用,为电机提供了准确的反馈信号,从而实现闭环控制,使电机能够更加稳定、可靠地工作。
2、电机控制系统中通常使用转速观测器代替编码器实现无传感器控制,采样变频器输出电压和电流,以机理建模为模型计算出电机的转速。现有转速观测器模型简单,技术成熟,但是会有以下问题:由于采样、坐标变换等环节均有延时,因此转速观测器的输入无法避免的会引入延时误差,影响转速计算的准确性;传统观测器计算方式通常为开环计算,观测器鲁棒性差,易受外部扰动影响,且无法消除模型失配带来的计算偏差。
技术实现思路
1、针对现有技术中存在的问题,本发明提供一种电机控制系统的转速观测方法,所述电机控制系统包括电机和连接所述电机的三相电变频器,则所述转速观测方法包括:
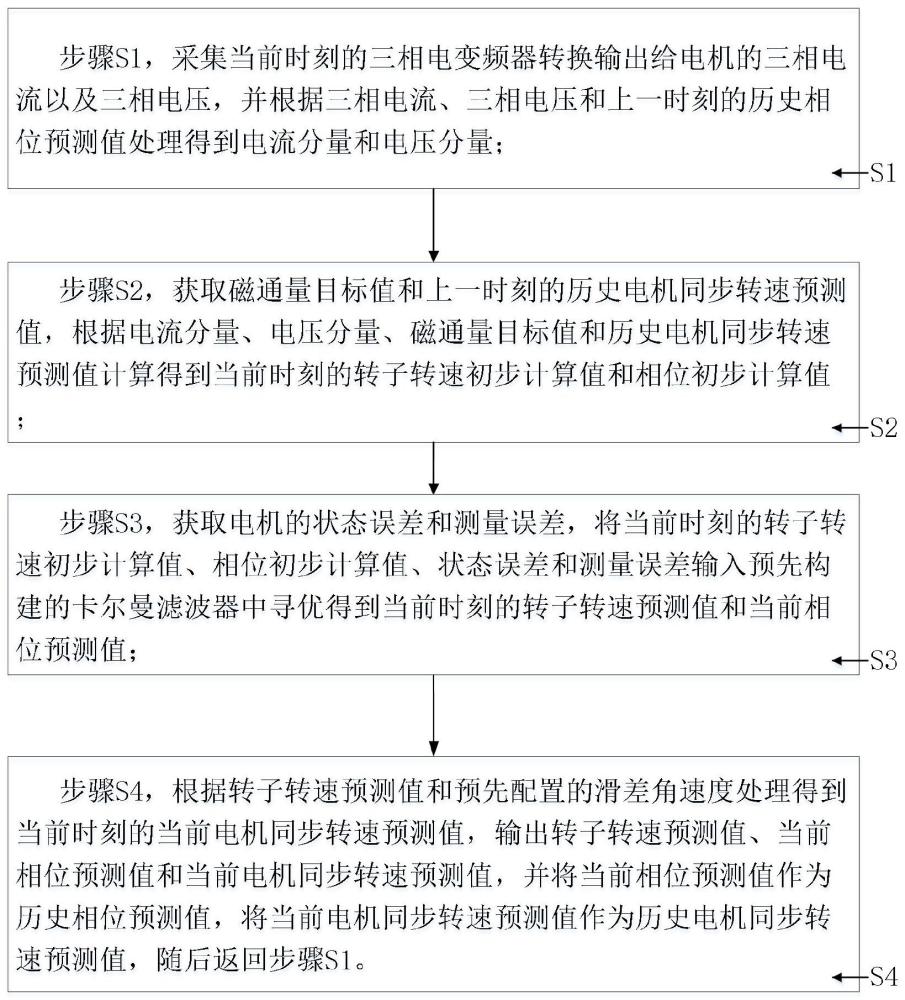
2、步骤s1,采集当前时刻的所述三相电变频器转换输出给所述电机的三相电流以及三相电压,并根据所述三相电流、所述三相电压和上一时刻的历史相位预测值处理得到电流分量和电压分量;
3、步骤s2,获取磁通量目标值和上一时刻的历史电机同步转速预测值,根据所述电流分量、所述电压分量、所述磁通量目标值和所述历史电机同步转速预测值计算得到当前时刻的转子转速初步计算值和相位初步计算值;
4、步骤s3,获取所述电机的状态误差和测量误差,将当前时刻的所述转子转速初步计算值、所述相位初步计算值、所述状态误差和所述测量误差输入预先构建的卡尔曼滤波器中寻优得到当前时刻的转子转速预测值和当前相位预测值;
5、步骤s4,根据所述转子转速预测值和预先配置的滑差角速度处理得到当前时刻的当前电机同步转速预测值,输出所述转子转速预测值、所述当前相位预测值和所述当前电机同步转速预测值,并将所述当前相位预测值作为所述历史相位预测值,将所述当前电机同步转速预测值作为所述历史电机同步转速预测值,随后返回所述步骤s1。
6、优选的,所述步骤s2包括:
7、步骤s21,获取磁通量目标值和上一时刻的历史电机同步转速预测值,根据所述电流分量、所述电压分量、所述磁通量目标值和所述历史电机同步转速预测值进行磁通计算得到励磁磁通、电机感应电动势m轴分量和电机感应电动势t轴分量;
8、步骤s22,根据所述励磁磁通、所述电机感应电动势m轴分量和所述电机感应电动势t轴分量进行转速计算得到当前时刻的所述转子转速初步计算值和所述相位初步计算值。
9、优选的,所述步骤s3中的卡尔曼滤波器包括卡尔曼滤波预测模型、迭代协方差矩阵和增益矩阵,所述迭代协方差矩阵设有迭代上限,则步骤s3中的寻优过程包括:
10、步骤a1,初始化迭代次数,所述卡尔曼滤波预测模型根据所述转子转速初步计算值、所述相位初步计算值处理得到当前时刻的当前状态变量,随后根据所述状态误差、所述测量误差、所述当前状态变量、预先配置的电机转动惯量和电机输出转矩处理得到当前时刻的状态变量预测值和下一时刻的下一时刻状态变量,根据所述状态误差处理得到第一协方差值,根据所述测量误差处理得到第二协方差值;
11、步骤a2,根据所述第一协方差值和所述第二协方差值计算得到当前时刻的卡尔曼增益值;
12、步骤a3,根据所述卡尔曼增益值和所述第一协方差值计算得到下一次迭代的预测第一协方差值;
13、步骤a4,根据所述下一时刻状态变量、所述卡尔曼增益值、所述状态变量预测值和所述当前状态变量计算得到当前迭代的最终预测状态变量;
14、步骤a5,根据所述迭代次数、预设的代价函数和所述迭代上限判断是否达到迭代完成条件:
15、若是,则将所述最终预测状态变量作为当前时刻的所述转子转速预测值和所述当前相位预测值输出;
16、若否,则将所述最终预测状态变量作为所述当前状态变量,将所述预测第一协方差值作为所述第一协方差值,随后增加一次所述迭代次数并返回所述步骤a2。
17、优选的,所述步骤a5包括:
18、步骤a51,将当前时刻的所述卡尔曼增益值和上一次时刻的历史卡尔曼增益值代入所述代价函数,判断所述代价函数的结果是否不大于预设的阈值:
19、若是,则所述最终预测状态变量作为当前时刻的所述转子转速预测值和所述当前相位预测值输出;
20、若否,则转向步骤a52;
21、步骤a52,判断所述迭代次数是否大于所述迭代上限:
22、若是,则所述最终预测状态变量作为当前时刻的所述转子转速预测值和所述当前相位预测值输出;
23、若否,则将所述最终预测状态变量作为所述当前状态变量,将所述预测第一协方差作为所述第一协方差值,随后增加一次所述迭代次数并返回所述步骤a2。
24、优选的,所述步骤a1中根据所述当前状态变量、预先配置的电机转动惯量和电机输出转矩处理得到当前时刻的所述状态变量预测值和下一时刻的所述下一时刻状态变量满足以下公式:
25、xk+1=axk+buk+w
26、yk=cxk+1+v
27、其中,uk=te,te为所述电机输出转矩,ts为采样周期,即当前时刻和下一时刻之间的时间间隔,j为所述电机转动惯量,xk为当前时刻的所述状态变量,xk+1为所述下一时刻状态变量,yk为所述状态变量预测值,w为所述状态误差,v为所述测量误差。
28、优选的,所述步骤a2中根据所述第一协方差值和所述第二协方差值计算得到当前迭代的所述卡尔曼增益值满足以下公式:
29、kk=pkct/(cpkct+r)
30、其中,kk为当前时刻的所述卡尔曼增益值,pk为当前时刻的所述第一协方差值,r为所述第二协方差值。
31、优选的,所述步骤a3中根据所述卡尔曼增益值和所述第一协方差值计算得到下一次迭代的预测第一协方差值满足以下公式:
32、pk+1=(i-kkc)pk
33、其中,pk+1为下一迭代的所述预测第一协方差,i为单位矩阵,kk为当前时刻的所述卡尔曼增益值,pk为当前迭代的所述第一协方差值。
34、优选的,所述步骤a4中根据所述下一时刻状态变量、所述卡尔曼增益值、所述状态变量预测值和所述当前状态变量计算得到当前迭代的最终预测状态变量满足以下公式:
35、
36、其中,为所述最终预测状态变量,xk+1为所述下一时刻状态变量,kk为当前迭代的所述卡尔曼增益值,xk为当前时刻的所述状态变量,yk为所述状态变量预测值。
37、优选的,所述步骤a51中所述代价函数的结果计算公式为:
38、g=||kk-kk-1||2
39、其中,g所述代价函数的结果,kk为所述当前时刻的卡尔曼增益值,kk-1为上一时刻的所述历史卡尔曼增益值。
40、上述技术方案具有如下优点或有益效果:利用了卡尔曼滤波器闭环计算,可以有效地观测电机的转速和相位,提高转速观测的准确性和鲁棒性,解决了现有技术中由于延时误差、外部扰动和模型失配等因素导致的转速计算不准确的问题,并且卡尔曼滤波器观测得到的转速和相位还用于修正下一时刻的电流分量和电压分量的计算,使观测结果更加准确。
- 还没有人留言评论。精彩留言会获得点赞!