一种微电网分布式经济优化控制方法与流程
本发明涉及一种微电网分布式经济优化控制方法,属于微电网。
背景技术:
1、风机、光伏等可再生能源的大量接入一方面极大地促进了微电网的发展,另一方面也为微电网的运行带来不确定性。微电网作为集成了发电机、储能、可再生能源发电、负荷的自治电力系统,可运行于并网模式,也可独立运行于孤岛模式下。在孤岛模式下,由于没有大电网提供的功率支撑,通常需要利用储能功率快速调节的能力来平衡系统内由新能源和负荷变化产生的不平衡功率。传统的大电网集中式控制对控制中心的可靠性提出了很高的要求,控制中心和通信的故障可能导致整个系统失去控制效果;而分散控制由于其通常仅利用片面的本地信息,无法精确分配功率,难以实现多个节点之间的经济性功率分配,无法达到全局优化目标。
2、针对集中式和分散控制的局限,学者提出基于多智能体通信的分布式控制。而现有的微电网分布式优化控制策略为了不影响运行成本最低这一目标,通常目标函数中不存在soc均衡度,这样容易对长时间运行的储能稳定性产生影响,某些储能容易提前退出运行,影响微电网应对可再生能源与负荷出力波动的能力;而为了实现soc均衡,现有许多基于改进下垂控制的方法通常无法考虑全局运行成本,且可能存在诸如频率偏差、功率分配精度低、无法应对不同容量等问题,尚未建立一种成熟的控制方法。
技术实现思路
1、为了克服现有技术的缺点,本发明建立了考虑储能的充放电效率和soc的不均衡度的储能模型,提出了一种完全分布式的微电网经济调度策略。本发明的一种微电网分布式经济优化控制方法,基于微电网各智能体之间的通信连接,通过平均一致性的方法获得全网储能soc的均值,然后利用所述全网储能soc的均值进行分布式优化迭代计算,实现考虑soc均衡度以及微网运行成本的全局目标函数最优。
2、本发明方法的具体方案如下:
3、一种微电网分布式经济优化控制方法,具体包括如下步骤:
4、1)分布式优化控制目标建模:分布式优化控制目标可以表达为下式,具体包括经济性目标和soc均衡目标两个组成部分。
5、
6、101)经济性目标:即微电网整体运行成本最低,储能的成本主要包括一次投资成本与运维成本,可写作与功率相关的二次函数:
7、cie(pib)=αi(pib)2+βipib
8、其中,pib表示节点i的储能出力大小,αi和βi分别表示储能出力的二次和一次成本系数。
9、运行成本另一方面是微型燃气轮机的燃料成本。微电网当中的化石燃料机组,通常作为有功和无功均可控的发电单元。柴油发电机和微型燃气轮机是微电网中一种常用的化石燃料发电机组,一般的微型燃气轮机发电成本与传统柴油机发电机组类似,均可表示为出力的二次函数,因此微电网中化石燃料机组发电所需的燃料成本为:
10、
11、其中pimt表示燃气轮机出力,和表示微型燃机所需的燃料成本系数。
12、102)soc均衡目标:第二部分为考虑可调度容量的soc均衡度目标,soc较大的储能更倾向于放电和低功率充电,soc较小的储能更倾向于充电和低功率放电,为了保证目标函数的强凸性,加入soc方差作为目标,且考虑根据智能体i管理的储能的soc与均值的距离动态调整权重:
13、
14、其中,ksoc表示soc的影响系数,si表示智能体i管理的储能soc,simean表示智能体i对全网储能soc平均值的估计,δt间隔时间,ci表示储能等效容量。
15、2)分布式优化控制约束条件建模:
16、201)微电网功率平衡约束:
17、储能控制的目标需要实现微电网全网的功率平衡,具体为:
18、
19、其中,pidg为智能体i所管理的可再生能源出力,pil为智能体i所述管理的负载出力;
20、202)储能约束:
21、储能的出力需要满足功率上下限约束。
22、
23、其中和分别表示储能充放电功率上限和下限。
24、203)储能荷电量约束:
25、为了保证用电的安全性和储能工作寿命,储能荷电量需要保持在允许范围之内:
26、si,min≤si≤si,max
27、其中si,min和si,max分别表示节点i储能soc的上限和下限。
28、204)微型燃气轮机功率约束
29、微型燃气轮机具有设备容量约束,其出力需要满足:
30、
31、其中表示节点i微燃机的功率上限。
32、3)智能体通信的权重矩阵生成:
33、权重矩阵wk的计算公式为,
34、
35、其中κ通过粒子群算法的方式选取最优值:设所生成种群个体数为ns,其中个体xk为[0,1]随机数,作为κ的值,其对应的权重矩阵为wk。ni和nj分别为与智能体i和j存在通信关系的智能体数量;ωi为与智能体i存在通信关系的智能体集合。
36、通过粒子群算法的方式选取κ的最优值的具体过程为:
37、与常规粒子群算法相比,区别在于:
38、a.判断个体是否处于可行域内的条件为:
39、
40、
41、
42、
43、b.适应度函数为目标通信网络拓扑下,随机若干次初始状态下达到收敛所需的迭代次数的平均值,即:
44、
45、其中,ffit(xk)表示适应度函数,r表示随机初始状态总数,sr(m)表示第r种随机初始状态在第m次迭代后的状态,σ为一致性收敛判定阈值。选取种群最优个体x*生成通信权重矩阵w*,最优个体将满足:
46、
47、c.迭代过程中超出可行域的个体将被舍弃,并随机生成一个新的并在可行域内的个体。考虑到目标函数不连续,每次迭代后随机选取50%个体并初始化为处于[0,1]的随机数,防止求解陷入局部最优。
48、4)基于一致性算法的分布式控制策略:
49、401)各智能体采集本地信息,按照下式初始化状态量;
50、
51、其中,为智能体i对全网储能soc均值的估计的初始值,λi0为智能体lagrange乘子的初始值,pib,0为智能体i管理的节点的储能出力的初始值,pimt,0为智能体i管理的燃气轮机出力的初始值,pid,0为智能体i管理的节点的不平衡功率的初始值,pil,t和pidg,t分别表示t时刻智能体i的储能soc、节点负载和可再生能源出力大小。
52、402)智能体将状态信息发送给所有邻居智能体,智能体接收来自邻居的信息之后更新在本地记录的记录。
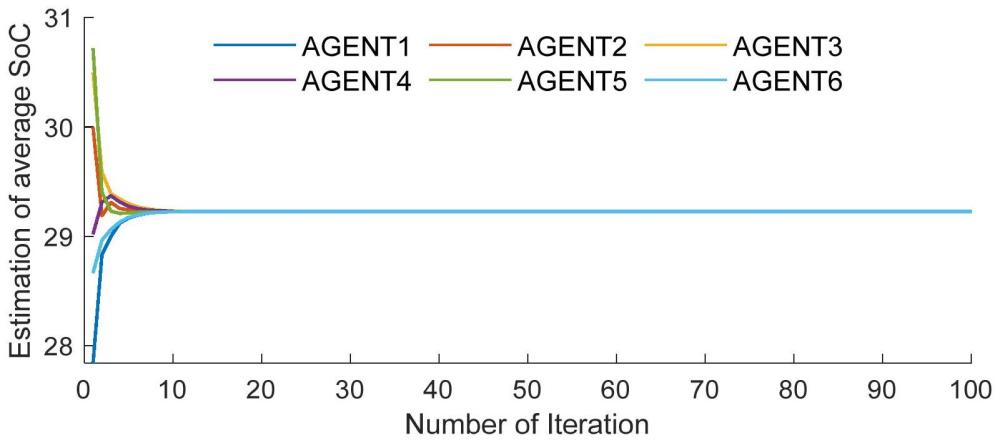
53、403)按照下式更新智能体对全网储能soc均值的估计值
54、
55、其中,和分别为智能体j和i对全网储能soc均值的估计值。
56、404)lagrange乘子更新:按照下式更新智能体本地lagrange乘子
57、
58、其中,上标k表示迭代次数,λi表示智能体i的lagrange乘子,cw表示系数,wij表示智能体i和j之间通信网络的权重系数,pid表示智能体i管理的节点的不平衡功率。
59、405)储能输出功率计算:以智能体在403)中估计得到的soc均值作为真实soc均值,按照下式更新智能体本地储能出力,确保计算得到的储能出力满足设备出力约束、soc约束;
60、
61、
62、
63、其中,分别为功率的直接计算结果、满足上下限约束的功率和满足上下限及soc约束的功率;
64、406)微燃机输出功率计算:按照下式更新智能体本地微燃机出力,确保计算得到的出力满足设备出力约束;
65、
66、407)智能体管理的节点的不平衡功率更新:按照下式更新智能体本地的不平衡功率;
67、
68、408)分布式优化收敛判断:根据下式判断智能体管理的节点的不平衡功率是否满足收敛条件
69、pid,k≤ε
70、如满足,则智能体停止主动向邻居发送状态信息,否则,回到步骤402)进行下一轮迭代,直到所有智能体的节点的不平衡功率满足收敛条件(即上式得到满足),可知此时确保全局总功率约束得到满足。
71、409)各智能体在一定的时间内没有接收来自任意邻居的信息,同时自身处于停止发送信息的状态时,各智能体认为分布式优化完成,最优功率被下发至各自的储能微源控制器和微燃机功率控制器,储能通过pq控制环跟随给定功率,实现对节点出力的分布式优化控制。
72、本发明的有益效果是:
73、本发明所提出的控制方法确保了微电网各节点能够自动调节其节点储能出力大小,以实现经济运行和soc均衡的目标。通过点对点的通信,智能体能够从邻居获取状态信息,利用覆盖全网络各节点的通信网络,智能体能够在每次迭代过程中逐步达成平均一致性和最优状态。进一步地,提出的基于粒子群算法的权重矩阵参数寻优,实现快速平均一致性迭代,提高了分布式优化的准确度。
- 还没有人留言评论。精彩留言会获得点赞!