一种应用于步进电机驱动的H桥自适应衰减控制方法与流程
本发明涉及h桥驱动电路,具体为一种应用于步进电机驱动的h桥自适应衰减控制方法。
背景技术:
1、在h桥驱动电路中如图1所示,四个mos管(101~104)组成了驱动电机线圈的h桥。当h桥工作时,如果mos管101与mos管104同时导通,则电流方向如图中实线箭头107所示。当h桥驱动达到所需电流后将会关断mos管101与mos管104,但由于绕组线圈电感特性,其电流将按照原方向继续流动(续流特性),此时有两种续流方式:
2、第一种是下管循环,即打开下部mos管102、104,关闭上部mos管101、103,此时电流方向如虚线箭头106所示。由于此时线圈与电机电源脱离,仅受反电动势的影响,因此这种续流方式的电流变化较小,称为慢衰减;
3、第二种是关闭原工作的mos管101、104,打开反向mos管102、103,此时电流方向如虚线箭头105所示。此时线圈受电机电源和反电动势共同作用,因此这种续流方式的电流变化较大,称为快衰减;
4、典型的电流控制方式为一个控制周期内既有快衰减又有慢衰减,称之为混合衰减,混合衰减通常是驱动后先进行快衰减再进行慢衰减,亦可以先慢衰减再快衰减;图2描述了上述电流变化方式,图中横轴为时间,纵轴为电流大小,当h桥处于驱动状态,h桥对角的mos管101、104打开(或者102、103打开),电流迅速上升(202阶段),由于mos开关会有高频的开关噪音,在mos开关的瞬间对电流有较大的影响,如果此时对电流进行处理容易误判,因此在mos管101、104(或者102、103)打开后将有一个最短的驱动时间,此时间段201内不对电流做任何处理,该段时间称为禁止期tblank;当电流达到目标值后,mos管101、104(或者102、103)关闭,h桥进入衰减阶段200(预设的固定值toff),根据衰减特性,衰减阶段200分为两个阶段:203阶段为上述的快衰减阶段,同理203阶段内也存在最短持续时间201,203阶段结束后为慢衰减阶段204。如果在衰减阶段200内,全部为快衰减203,称之为快衰减模式;如果在衰减阶段200内,全部为慢衰减204,称之为慢衰减模式。
5、快/慢衰减各有优缺点,快衰减具有电流变化快,能跟上迅速变化的电流,但是快衰减会导致更大的电流纹波,造成电机振动等影响;慢衰减电流纹波小,但当电机转速较高时,慢衰减跟不上快速变化的电流,导致电流波形容易失真;混合衰减兼具快衰减和慢衰减优点,既能在一定程度上保证电流纹波小,又可以适应电流的迅速变化,但固定比例的混合衰减需要针对每种电机调出最佳快衰减与慢衰减之间的比例,存在耗时长、调试繁琐等缺点,且该比例受电源电压、电阻和工况等的影响,当电机老化或工况变化时,还要重新调试,这就导致固定比例的混合衰减不能适应环境和工况的变化。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种应用于步进电机驱动的h桥自适应衰减控制方法,其能够自动调节快衰减和慢衰减之间比例的控制方式,可以保证电机在任何工况和环境下具有较高的性能。
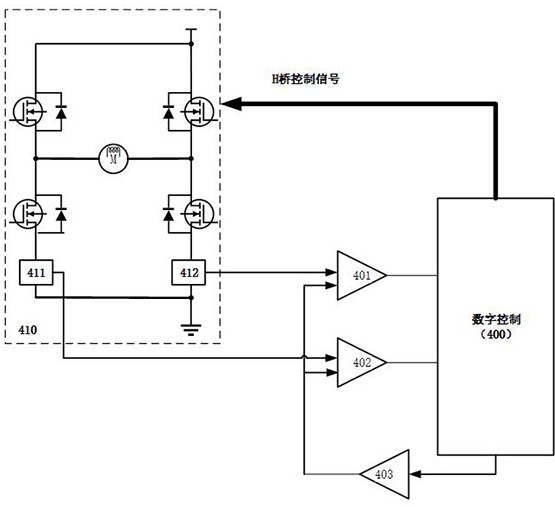
2、其技术方案是这样的:一种应用于步进电机驱动的h桥自适应衰减控制方法,其包括h桥电路,其特征在于,h桥电路的两个下桥下侧分别设置电流感应单元,两个所述电流感应单元分别对应连接不同模拟比较器的一个输入端,两个模拟比较器的输出端连接数字控制单元的输入端,数字控制单元提供目标电流值给两个模拟比较器的另一个输入端,数字控制单元输出h桥控制信号给h桥电路实现驱动模式、慢衰减模式、快衰减模式的切换。
3、其进一步特征在于,数字控制单元内部控制逻辑如下:电流上升阶段中,当进入驱动状态,计时器count清零并开始计时,电流在电源电压的作用下此电流快速上升,当计时器count计时超过禁止期tblank时间后,同时电流值也达到目标电流值时,模拟比较器输出比较信号进行翻转,数字控制器接收到比较器翻转信号后进入慢衰减阶段,此时计时器count清零,重新计时,经过固定值toff时间的慢衰减后,电流会慢慢下降,如果此时电流值小于目标电流值,则立刻进入驱动状态,如果此时电流值大于目标电流值,则立刻进入快衰减,电流会快速下降,快衰减持续禁止期tblank时间,接着又进入驱动状态;
4、电流下降阶段中,当进入驱动状态,若电流驱动时间大于禁止期tblank时间且电流值达到目标电流值后,则立即进入慢衰减模式,直至固定值toff时间结束;若电流驱动时间等于禁止期tblank时间且电流值达到目标电流值后,则立即进入快衰减模式,计时器count清零并开始计时,快衰减持续禁止期tblank时间后进入慢衰减,直至固定值toff时间结束;当固定值toff时间结束时刻的电流值小于目标电流值,则立刻进入驱动状态,当固定值toff时间结束时刻的电流值大于目标电流值,则跳过驱动状态,直接进入快衰减,计时器count清零并开始计时,当计时超过禁止期tblank时间且电流值小于目标电流值后,进入慢衰减,直至固定值toff时间结束;当数字控制单元通过给出的目标电流突然减小,不管此时是位于驱动状态还是慢衰减模式,h桥电路都会立刻进入快衰减方式,保证电流快速跟随目标电流的变化,直到电流值小于目标电流值,h桥电路进入慢衰减模式,同时计时器count清零开始计时,直至固定值toff时间结束;
5、数字控制单元给出的目标电流值经过数模转换器后进入模拟比较器的输入端。
6、采用本发明后,数字控制单元能够实时根据h桥环境、工作状态的特征进行调整,最大限度的保证h桥采取最优的衰减方式,使得电流以最小纹波的状态密切跟踪目标电流,达到最优的工作性能。
技术特征:
1.一种应用于步进电机驱动的h桥自适应衰减控制方法,其包括h桥电路,其特征在于,h桥电路的两个下桥下侧分别设置电流感应单元,两个所述电流感应单元分别对应连接不同模拟比较器的一个输入端,两个模拟比较器的输出端连接数字控制单元的输入端,数字控制单元提供目标电流值给两个模拟比较器的另一个输入端,数字控制单元输出h桥控制信号给h桥电路实现驱动模式、慢衰减模式、快衰减模式的切换。
2.根据权利要求1所述的一种应用于步进电机驱动的h桥自适应衰减控制方法,其特征在于,数字控制单元内部控制逻辑如下:电流上升阶段中,当进入驱动状态,计时器count清零并开始计时,电流在电源电压的作用下此电流快速上升,当计时器count计时超过禁止期tblank时间后,同时电流值也达到目标电流值时,模拟比较器输出比较信号进行翻转,数字控制器接收到比较器翻转信号后进入慢衰减阶段,此时计时器count清零,重新计时,经过固定值toff时间的慢衰减后,电流会慢慢下降,如果此时电流值小于目标电流值,则立刻进入驱动状态,如果此时电流值大于目标电流值,则立刻进入快衰减,电流会快速下降,快衰减持续禁止期tblank时间,接着又进入驱动状态。
3.根据权利要求1所述的一种应用于步进电机驱动的h桥自适应衰减控制方法,其特征在于,电流下降阶段中,当进入驱动状态,若电流驱动时间大于禁止期tblank时间且电流值达到目标电流值后,则立即进入慢衰减模式,直至固定值toff时间结束;若电流驱动时间等于禁止期tblank时间且电流值达到目标电流值后,则立即进入快衰减模式,计时器count清零并开始计时,快衰减持续禁止期tblank时间后进入慢衰减,直至固定值toff时间结束;当固定值toff时间结束时刻的电流值小于目标电流值,则立刻进入驱动状态,当固定值toff时间结束时刻的电流值大于目标电流值,则跳过驱动状态,直接进入快衰减,计时器count清零并开始计时,当计时超过禁止期tblank时间且电流值小于目标电流值后,进入慢衰减,直至固定值toff时间结束;当数字控制单元通过给出的目标电流突然减小,不管此时是位于驱动状态还是慢衰减模式,h桥电路都会立刻进入快衰减方式,保证电流快速跟随目标电流的变化,直到电流值小于目标电流值,h桥电路进入慢衰减模式,同时计时器count清零开始计时,直至固定值toff时间结束。
4.根据权利要求1所述的一种应用于步进电机驱动的h桥自适应衰减控制方法,其特征在于,数字控制单元给出的目标电流值经过数模转换器后进入模拟比较器的输入端。
技术总结
本发明涉及H桥驱动电路技术领域,具体为一种应用于步进电机驱动的H桥自适应衰减控制方法,其能够自动调节快衰减和慢衰减之间比例的控制方式,可以保证电机在任何工况和环境下具有较高的性能,其包括H桥电路,H桥电路的两个下桥下侧分别设置电流感应单元,两个所述电流感应单元分别对应连接不同模拟比较器的一个输入端,两个模拟比较器的输出端连接数字控制单元的输入端,数字控制单元提供目标电流值给两个模拟比较器的另一个输入端,数字控制单元输出H桥控制信号给H桥电路实现驱动模式、慢衰减模式、快衰减模式的切换。
技术研发人员:吴建林,黄海滨,叶然然
受保护的技术使用者:杭州思泰微电子有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!