一种带电作业机器人用分支线预定位工具的制作方法
本技术涉及高压电气线路及设备的安装、检修及测试,具体为一种带电作业机器人用分支线预定位工具。
背景技术:
1、随着科技的进步和社会的发展,人们对用电质量的要求日益增加。为减少配电网停电时间,提高供电可靠性,配电网带电作业已成为最直接、最有效的方法。伴随配网带电作业智能机器人的应用,不仅能够克服绝缘手套作业法,受回路多、相间距等的限制,提高了作业环境适应性,从而减少了停电率,提升了供电可靠性,带来更高的社会效益;而且避免了作业人员与带电体的接触,提高了作业安全性,同时降低了作业人员的劳动强度。
2、由于在导线相间距较小以及特殊的排列方式的场景下,导致现有的带电作业机器人很难对中相导线进行带电作业,需要克服不便将分支线送至主导线附近并固定在主导线上的难题。
技术实现思路
1、本实用新型的目的在于提供一种带电作业机器人用分支线预定位工具,以解决上述背景技术中提出的问题。
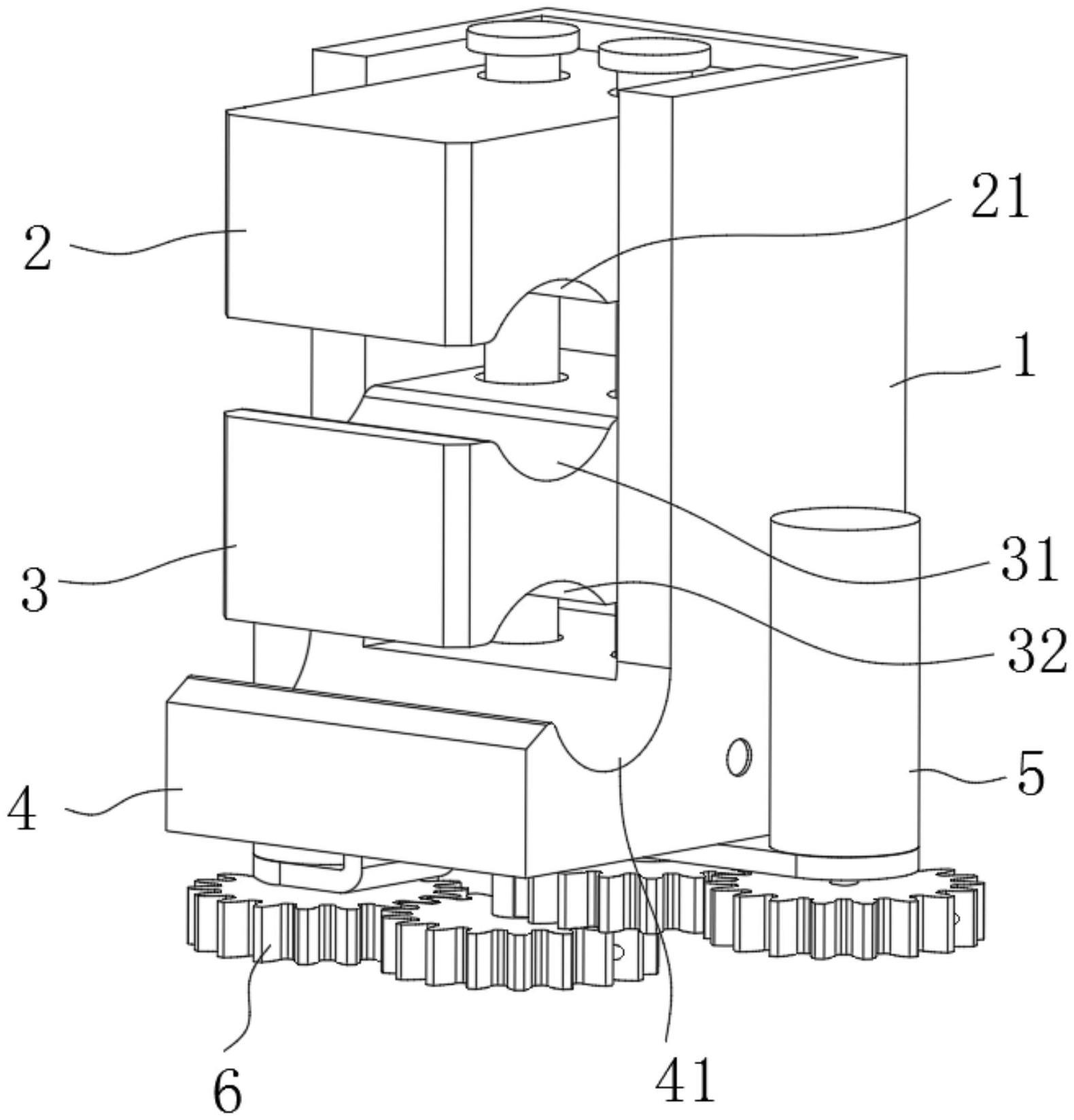
2、为了解决上述技术问题,本实用新型提供如下技术方案:一种带电作业机器人用分支线预定位工具,包括底座,所述底座上设置有夹持区;所述夹持区上方设置有主线夹紧滑块、分支线夹紧滑块,所述主线夹紧滑块和分支线夹紧滑块均可移动设置在底座上;所述主线夹紧滑块、分支线夹紧滑块沿竖直方向排布且位置对应,所述夹持区与分支线夹紧滑块位置对应;所述底座上设置有第一驱动机构,所述第一驱动机构用于驱动主线夹紧滑块的上下移动;所述底座上还设置有第二驱动机构,所述第二驱动机构用于驱动分支线夹紧滑块的上下移动。
3、进一步的,所述主线夹紧滑块相对分支线夹紧滑块的一侧设置有第一夹持槽,所述分支线夹紧滑块相对主支线夹紧滑块的一侧设置有第二夹持槽,所述第一夹持槽与第二夹持槽位置对应。
4、进一步的,所述分支线夹紧滑块设于主线夹紧滑块与夹持区之间,所述分支线夹紧滑块相对夹持区的一侧设置有第三夹持槽,所述夹持区相对分支线夹紧滑块的一侧设置有第四夹持槽,所述第三夹持槽与第四夹持槽位置对应。
5、进一步的,所述第一驱动机构包括第一支座,所述第一支座上安装有第一驱动电机,所述第一驱动电机的输出端穿过第一支座且套设有第一主动齿轮,所述第一主动齿轮的一侧啮合有第一从动齿轮,所述第一从动齿轮的中心穿设有一根第一丝杆;所述主线夹紧滑块上设置有第一螺纹孔,所述分支线夹紧滑块上设置有第二通孔;所述第一丝杆转动设于底座上,所述第一丝杆依次穿设第二通孔和第一螺纹孔,且第一丝杆与第一螺纹孔螺纹配合连接;所述第一丝杆远离第一从动齿轮的一端设置有第一挡块。
6、进一步的,所述第二驱动机构包括第二支座,所述第二支座上安装有第二驱动电机,所述第二驱动电机的输出端穿过第二支座且套设有第二主动齿轮,所述第二主动齿轮的一侧啮合有第二从动齿轮,所述第二从动齿轮的中心穿设有一根第二丝杆;所述分支线夹紧滑块上设置有第二螺纹孔,所述主线夹紧滑块上设置有第一通孔;所述第二丝杆转动设于底座上,所述第二丝杆依次穿设第二螺纹孔和第一通孔,且第二丝杆与第二螺纹孔螺纹配合连接;所述第二丝杆远离第二从动齿轮的一端设置有第二挡块。
7、进一步的,所述底座上设置有滑槽,所述主线夹紧滑块、分支线夹紧滑块均移动设置在滑槽内部。
8、与现有技术相比,本实用新型所达到的有益效果是:通过第一驱动电机、第二驱动电机可实现主线夹紧滑块和分支线夹紧滑块的移动,便于实现将主线和分支线的夹持固定,即便于实现将分支线固定在主导线上;与此同时,该预定位工具可搭配机器人手臂使用,方便进行后续的带电作业。
技术特征:
1.一种带电作业机器人用分支线预定位工具,其特征在于:包括底座(1),所述底座(1)上设置有夹持区(4);
2.根据权利要求1所述的一种带电作业机器人用分支线预定位工具,其特征在于:所述主线夹紧滑块(2)相对分支线夹紧滑块(3)的一侧设置有第一夹持槽(21),所述分支线夹紧滑块(3)相对主支线夹紧滑块的一侧设置有第二夹持槽(31),所述第一夹持槽(21)与第二夹持槽(31)位置对应。
3.根据权利要求1所述的一种带电作业机器人用分支线预定位工具,其特征在于:所述分支线夹紧滑块(3)设于主线夹紧滑块(2)与夹持区(4)之间,所述分支线夹紧滑块(3)相对夹持区(4)的一侧设置有第三夹持槽(32),所述夹持区(4)相对分支线夹紧滑块(3)的一侧设置有第四夹持槽(41),所述第三夹持槽(32)与第四夹持槽(41)位置对应。
4.根据权利要求1所述的一种带电作业机器人用分支线预定位工具,其特征在于:所述第一驱动机构(5)包括第一支座(51),所述第一支座(51)上安装有第一驱动电机(52),所述第一驱动电机(52)的输出端穿过第一支座(51)且套设有第一主动齿轮(54),所述第一主动齿轮(54)的一侧啮合有第一从动齿轮(55),所述第一从动齿轮(55)的中心穿设有一根第一丝杆(53);
5.根据权利要求1所述的一种带电作业机器人用分支线预定位工具,其特征在于:所述第二驱动机构(6)包括第二支座(61),所述第二支座(61)上安装有第二驱动电机(62),所述第二驱动电机(62)的输出端穿过第二支座(61)且套设有第二主动齿轮(64),所述第二主动齿轮(64)的一侧啮合有第二从动齿轮(65),所述第二从动齿轮(65)的中心穿设有一根第二丝杆(63);
6.根据权利要求1所述的一种带电作业机器人用分支线预定位工具,其特征在于:所述底座(1)上设置有滑槽(11),所述主线夹紧滑块(2)、分支线夹紧滑块(3)均移动设置在滑槽(11)内部。
技术总结
本技术公开了一种带电作业机器人用分支线预定位工具,包括底座,所述底座上设置有夹持区;所述夹持区上方设置有主线夹紧滑块、分支线夹紧滑块,所述主线夹紧滑块和分支线夹紧滑块均可移动设置在底座上;所述主线夹紧滑块、分支线夹紧滑块沿竖直方向排布且位置对应,所述夹持区与分支线夹紧滑块位置对应;所述底座上设置有第一驱动机构,所述第一驱动机构用于驱动主线夹紧滑块的上下移动;所述底座上还设置有第二驱动机构,所述第二驱动机构用于驱动分支线夹紧滑块的上下移动。本技术便于将分支线固定在主线上,方便搭配机器人进行带电作业。
技术研发人员:梁好,衣晓波
受保护的技术使用者:南京汉启智能科技有限公司
技术研发日:20230221
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!