一种轨道式智能巡检机器人充电维护基站的制作方法
本技术涉及充电基站,更确切地说,它涉及一种轨道式智能巡检机器人充电维护基站。
背景技术:
1、随着人工智能、控制技术以及机器人技术的不断进步,智能机器人产业开始爆发性增长。在现在的机器人家族中,智能巡检机器人因其非接触式巡检、高效准确的识别技术以及安全可靠的结构设计逐渐进入能源、石化以及制造业的生产现场,代替传统的人工巡检方式提高一线运维现场的安全生产以及维护效率。其中,轨道悬挂式机器人因其结构简单、可靠性强、体积小以及通过空间灵活的特点,更受环境恶劣、巡检目标分布复杂的生产现场青睐。
2、但是,随着轨道巡检机器人的规模应用,机器人本身的维护清洁以及网络部署成为使用过程中一大难题。因为轨道巡检机器人往往应用于电厂车间、矿洞、石化等环境相对恶劣现场,现场往往具备环境复杂、布置空间小、煤炭粉尘大等特点。当机器人部署安装的时候,其网络信号ap基站部署成为一个难点。并且在机器人运行一段时间后,现场的粉尘附着对机器人的无线充电桩、机器人本体结构以及机器人巡检流程都造成影响。
3、现在的机器人ap基站往往部署于地面,于轨道悬挂机器人位置较远,信号传输收到影响,而且运行现场的定期维护、检修都可能会对ap基站的造成影响。同时,轨道悬挂机器人部署于高空,传统轨道悬挂机器人由于结构问题及高空部署位置难以拆装。高粉尘现场对一般暴露布置的充电桩充电效率降低、机器人巡检传感器污染,最终影响机器人性能。也造成轨道机器人维护的人工成本较高、难度较大并且维护频繁等问题,对轨道智能巡检机器人的应用产生了巨大的影响。
技术实现思路
1、本实用新型的目的是克服现有技术中的不足,提供了一种轨道式智能巡检机器人充电维护基站,所述技术方案如下:
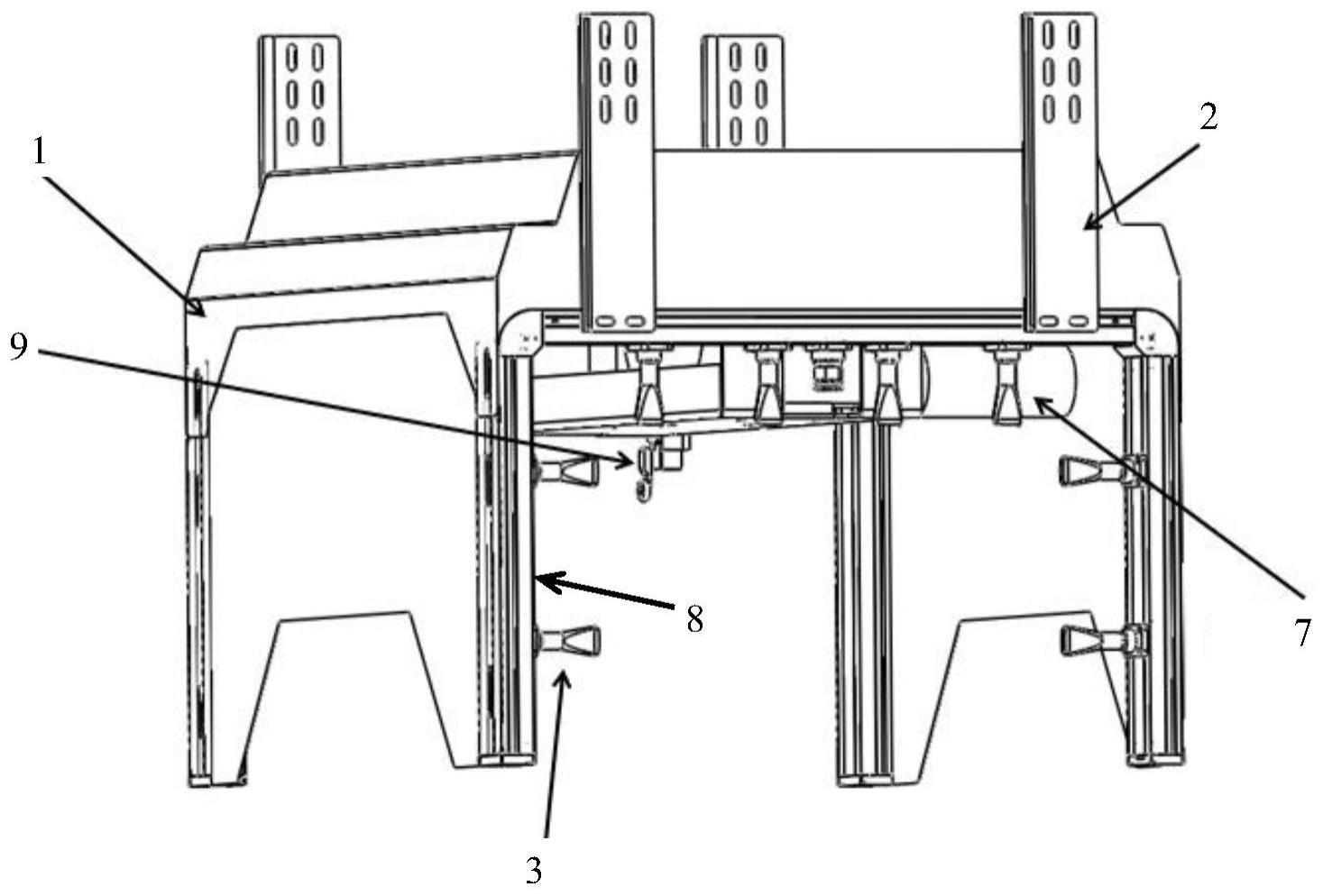
2、包括基站罩体、吊架、除尘喷嘴、鼓风机、鼓风机固定板、ap网络控制箱、无线充电发射端和型材框架;
3、其中,基站罩体通过吊架固定在轨道上方,基站罩体包覆有鼓风机、鼓风机固定板、ap网络控制箱和无线充电发射端;鼓风机与鼓风机固定板配合连接,ap网络控制箱设于鼓风机固定板上,无线充电发射端设于型材框架上。
4、作为优选,多个除尘喷嘴设于型材框架的横梁下缘和纵柱内侧上,形成除尘喷嘴矩阵。
5、作为优选,基站还设置有到位开关,所述到位开关设于型材框架的横梁下方。
6、作为优选,型材框架包括第一结构件和第二结构件,第一结构件和第二结构件之间设置有隔板;隔板上安装有过滤器与鼓风机固定板相连接。
7、作为优选,隔板的下部为梯形镂空,隔板与梯形镂空相邻的两侧形成梯形臂。
8、作为优选,多个除尘喷嘴设于型材框架的横梁下缘和纵柱内侧上,形成除尘喷嘴矩阵;隔板的下部为梯形镂空,隔板与梯形镂空相邻的两侧形成梯形臂,除尘喷嘴矩阵下方的除尘喷嘴设于梯形臂上。
9、作为优选,吊架的上方开有多排铆钉孔。
10、本实用新型的有益效果是:
11、1.本实用新型通过在基站内部矩阵式设置除尘喷嘴,实现对巡检机器人本体及传感器的全覆盖,可以有效地清除恶劣现场带来的脏污,防止大量煤粉进入机器人内部造成的电气故障。
12、2.本实用新型中的隔板的下部为梯形镂空,基站内部两侧的除尘喷嘴的吹风可以透过该梯形镂空,提高了除尘效果,且有益于散热;并且梯形镂空不仅增强了结构稳定性,还节约了材料成本,同时使得装置轻量化。
13、3.本实用新型在基站上集成了ap网络控制箱,相比现有技术中将ap网络控制箱设在地面,本实用新型的ap网络控制箱距离巡检机器人的位置较近,有效地提升了巡检机器人的响应速度,延迟更小。
14、4.本实用新型提供的基站采用了包裹覆盖式设计,通过基站罩体对无线充电发射端进行包覆,防止现场煤炭粉尘附着于充电接口以造成充电能力下降、巡检距离变短和巡检周期变长等问题。
15、5.本实用新型提供的基站将ap网络控制箱、无线充电发射端以及清洗维护设备集成为一体,可以最大化的利用现场空间,增加运行性能。
技术特征:
1.一种轨道式智能巡检机器人充电维护基站,其特征在于,包括:基站罩体(1)、吊架(2)、除尘喷嘴(3)、鼓风机(4)、鼓风机固定板(5)、ap网络控制箱(6)、无线充电发射端(7)和型材框架(8);
2.根据权利要求1所述的轨道式智能巡检机器人充电维护基站,其特征在于,多个除尘喷嘴(3)设于型材框架(8)的横梁下缘和纵柱内侧上,形成除尘喷嘴(3)矩阵。
3.根据权利要求1所述的轨道式智能巡检机器人充电维护基站,其特征在于,基站还设置有到位开关(9),所述到位开关(9)设于型材框架(8)的横梁下方。
4.根据权利要求1所述的轨道式智能巡检机器人充电维护基站,其特征在于,型材框架(8)包括第一结构件(801)和第二结构件(802),第一结构件(801)和第二结构件(802)之间设置有隔板(803);隔板(803)上安装有过滤器(10)与鼓风机固定板(5)相连接。
5.根据权利要求4所述的轨道式智能巡检机器人充电维护基站,其特征在于,隔板(803)的下部为梯形镂空,隔板(803)与梯形镂空相邻的两侧形成梯形臂(804)。
6.根据权利要求4所述的轨道式智能巡检机器人充电维护基站,其特征在于,多个除尘喷嘴(3)设于型材框架(8)的横梁下缘和纵柱内侧上,形成除尘喷嘴(3)矩阵;隔板(803)的下部为梯形镂空,隔板(803)与梯形镂空相邻的两侧形成梯形臂(804),除尘喷嘴(3)矩阵下方的除尘喷嘴(3)设于梯形臂(804)上。
7.根据权利要求1所述的轨道式智能巡检机器人充电维护基站,其特征在于,吊架(2)的上方开有多排铆钉孔。
技术总结
本技术涉及一种轨道式智能巡检机器人充电维护基站,包括基站罩体、吊架、除尘喷嘴、鼓风机、鼓风机固定板、AP网络控制箱、无线充电发射端和型材框架。本技术的有益效果是:本技术通过在基站内部矩阵式设置除尘喷嘴,实现对巡检机器人本体及传感器的全覆盖,可以有效地清除恶劣现场带来的脏污,防止大量煤粉进入机器人内部造成的电气故障;并在基站上集成了AP网络控制箱,相比现有技术中将AP网络控制箱设在地面,本技术的AP网络控制箱距离巡检机器人的位置较近,有效地提升了巡检机器人的响应速度,延迟更小。
技术研发人员:孙晖,王战,方国权,王丹,白永全,叶国满,张英驰,徐国宝,刘小聪,尚海
受保护的技术使用者:浙能阿克苏热电有限公司
技术研发日:20230529
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!