一种旋转装置及手术机器人的制作方法
本技术涉及手术机器人,特别涉及一种旋转装置及手术机器人。
背景技术:
1、手术机器人是一种集医学、电子信息学、机械物理学等多学科、多领域为一体的新型医疗器械,是当代医学信息化、程控化、智能化的一个重要发展方向。手术机器人在稳定性、安全性以及可行性的方面上显示出突出的优势,可增加手术的准确度,提高手术的质量;一定情况下,也可减少手术中的出血量和药物的使用量,既可减轻患者的痛苦,又有利于术后的快速痊愈。
2、手术机器人通常包括基座、立柱、吊杆、吊舱旋转控制装置、机械臂以及远心机构关节,医生需要根据患者腹腔位置,通过调整手术机器人的升降高度,使机械臂及远心机构关节能够位于患者腹腔表面,通过医生操控手术机器人进行腹腔手术。
3、现有的吊舱旋转控制装置仅通过在电机输出轴上设置增量编码器,以检测电机转动速度、转动圈数等参数,但是检测的精确度相对较低,导致电机参数读取精确度降低。
技术实现思路
1、本实用新型实施例的目的在于提供一种旋转装置,旋转控制装置的结构紧凑,功能稳定,回差小,精度高。
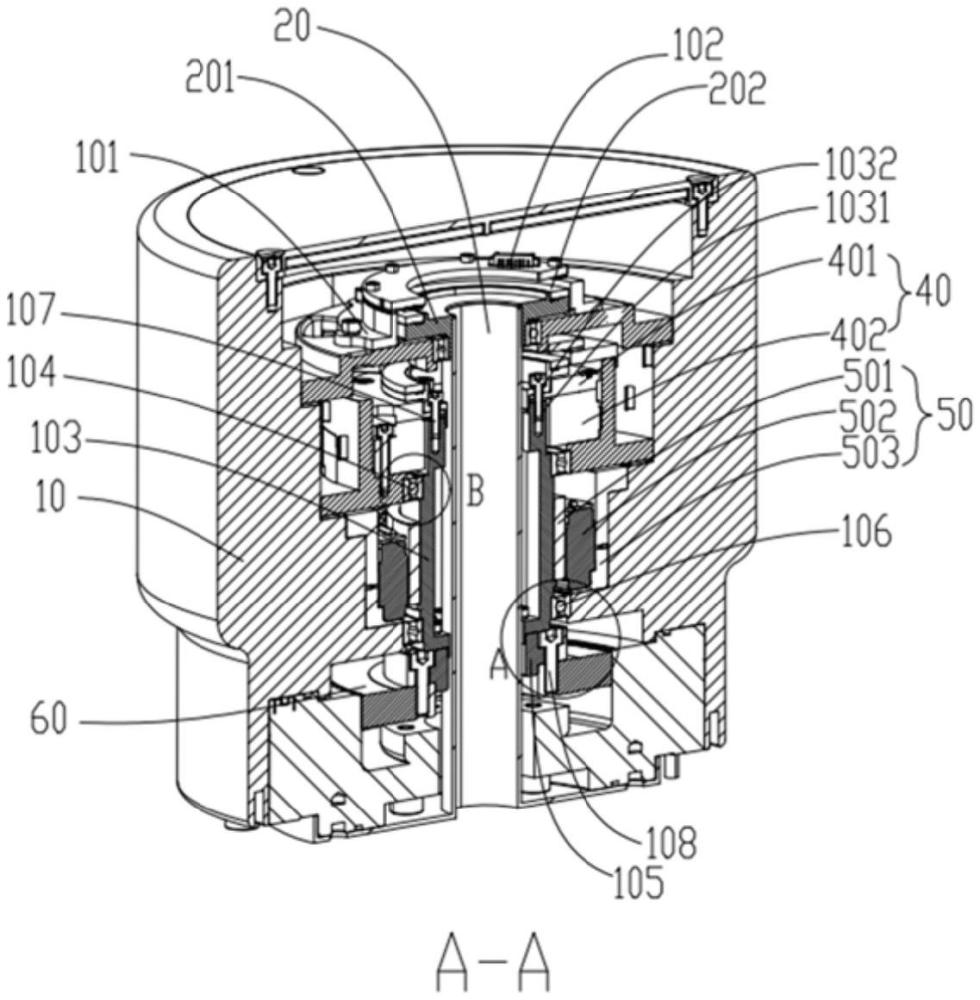
2、第一方面,本实用新型提供一种旋转装置,包括:外壳和同轴设置于所述外壳中的旋转轴;所述外壳和所述旋转轴之间设置旋转角度检测件、制动器、无框电机和减速器;所述无框电机的转子带动所述旋转轴旋转,所述无框电机的定子固定于所述外壳上。
3、于一实施例中,所述旋转角度检测件包括增量编码器和/或绝对编码器。
4、于一实施例中,所述旋转轴的端部和/或中部上通过安装件设有旋转角度检测件的磁环,所述外壳的对应位置通过安装组件设有旋转角度检测件的读头,所述读头和所述磁环对应。
5、于一实施例中,所述制动器设于所述旋转角度检测件的下方,所述制动器的制动片固定在安装所述旋转角度检测件的所述安装件的下方并随所述旋转轴同步转动,所述制动器的衔铁固定在安装所述旋转角度检测件的所述安装组件上,所述衔铁通过所述安装组件固定;通电状态下,所述制动片随所述旋转轴转动,断电状态下,所述衔铁与所述制动片吸附贴合,所述衔铁对所述旋转轴进行制动。
6、于一实施例中,所述旋转轴外套设有轴套,所述轴套上设有限位槽和/或安装孔;所述轴套顶端与所述旋转角度检测件的安装件、所述制动器的制动片连接;所述轴套通过至少一个轴承一与所述外壳和/或设于所述外壳上的安装组件连接,通过所述轴承一实现所述轴套相对于所述外壳旋转;所述轴套底端通过连接件与所述减速器连接。
7、于一实施例中,所述轴套底部设有第一凹槽,所述连接件的顶部抵接所述第一凹槽,所述第一凹槽用于限制所述连接件的轴向运动,所述第一凹槽向外延伸形成凸件,所述凸件用于限制所述连接件的径向运动。
8、于一实施例中,位于所述轴套的顶端的一侧边上设有第二凹槽,所述轴承一夹设在所述第二凹槽、所述安装组件之间;位于所述轴套的底部的一侧边上设有第三凹槽,轴承二夹设在所述第三凹槽、所述无框电机的电机座以及所述外壳形成的区域之间。
9、于一实施例中,所述连接件与所述减速器通过至少一个轴承件连接。
10、于一实施例中,所述旋转装置还包括:限位部件,所述限位部件包括:第一限位部和第二限位部;所述第一限位部设置在所述减速器上,所述第二限位部设置在手术机器人的横杆底部与所述减速器相对的对应位置处。
11、第二方面,本实用新型提供一种手术机器人,包括:立柱、悬臂、如本实用新型第一方面任一项实施例所述的旋转装置以及手术执行装置;所述悬臂的一端与所述立柱连接,另一端设有所述旋转装置;所述手术执行装置与所述旋转装置连接,通过所述旋转装置控制所述手术执行装置转动。
12、本实用新型的技术方案,本实用新型的旋转装置中的电气件在调试和维护时,不需要拆卸其他关节,维护和调试操作方便。其次,本实用新型的旋转装置的结构紧凑,功能稳定,回差小,精度高。
13、本实用新型通过限位部件的硬限位和程控上的软限位,可以根据实际操作需要,实现对无框电机的旋转和启停的控制,以及制动器的制动控制。
技术特征:
1.一种旋转装置,其特征在于,包括:外壳和同轴设置于所述外壳中的旋转轴;所述外壳和所述旋转轴之间设置旋转角度检测件、制动器、无框电机和减速器;所述无框电机的转子带动所述旋转轴旋转,所述无框电机的定子固定于所述外壳上。
2.根据权利要求1所述的旋转装置,其特征在于,所述旋转角度检测件包括增量编码器和/或绝对编码器。
3.根据权利要求1或2所述的旋转装置,其特征在于,所述旋转轴的端部和/或中部上通过安装件设有旋转角度检测件的磁环,所述外壳的对应位置通过安装组件设有旋转角度检测件的读头,所述读头和所述磁环对应。
4.根据权利要求3所述的旋转装置,其特征在于,所述制动器设于所述旋转角度检测件的下方,所述制动器的制动片固定在安装所述旋转角度检测件的所述安装件的下方并随所述旋转轴同步转动,所述制动器的衔铁固定在安装所述旋转角度检测件的所述安装组件上,所述衔铁通过所述安装组件固定;通电状态下,所述制动片随所述旋转轴转动,断电状态下,所述衔铁与所述制动片吸附贴合,所述衔铁对所述旋转轴进行制动。
5.根据权利要求1所述的旋转装置,其特征在于,所述旋转轴外套设有轴套,所述轴套上设有限位槽和/或安装孔;所述轴套顶端与所述旋转角度检测件的安装件、所述制动器的制动片连接;所述轴套通过至少一个轴承一与所述外壳和/或设于所述外壳上的安装组件连接,通过所述轴承一实现所述轴套相对于所述外壳旋转;所述轴套底端通过连接件与所述减速器连接。
6.根据权利要求5所述的旋转装置,其特征在于,所述轴套底部设有第一凹槽,所述连接件的顶部抵接所述第一凹槽,所述第一凹槽用于限制所述连接件的轴向运动,所述第一凹槽向外延伸形成凸件,所述凸件用于限制所述连接件的径向运动。
7.根据权利要求5所述的旋转装置,其特征在于,位于所述轴套的顶端的一侧边上设有第二凹槽,所述轴承一夹设在所述第二凹槽、所述安装组件之间;位于所述轴套的底部的一侧边上设有第三凹槽,轴承二夹设在所述第三凹槽、所述无框电机的电机座以及所述外壳形成的区域之间。
8.根据权利要求5所述的旋转装置,其特征在于,所述连接件与所述减速器通过至少一个轴承件连接。
9.根据权利要求1所述的旋转装置,其特征在于,所述旋转装置还包括:限位部件,所述限位部件包括:第一限位部和第二限位部;所述第一限位部设置在所述减速器上,所述第二限位部设置在手术机器人的横杆底部与所述减速器相对的对应位置处。
10.一种手术机器人,其特征在于,包括:立柱、悬臂、如权利要求1至9任一项所述的旋转装置以及手术执行装置;
技术总结
本技术提供一种旋转装置及手术机器人,旋转装置包括:外壳和同轴设置于外壳中的旋转轴;外壳和旋转轴之间设置旋转角度检测件、制动器、无框电机和减速器;无框电机的转子带动旋转轴旋转,无框电机的定子固定于外壳上。本技术的旋转装置中的电气件在调试和维护时,不需要拆卸其他关节,维护和调试操作方便。其结构紧凑,功能稳定,回差小,精度高。本技术的旋转装置可以根据实际操作需要,实现对无框电机的旋转和启停的控制,以及制动器的制动控制。
技术研发人员:请求不公布姓名
受保护的技术使用者:杭州唯精医疗机器人有限公司
技术研发日:20230810
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!