一种清洁机器人结构的制作方法
本技术涉及清洁,具体是一种清洁机器人结构。
背景技术:
1、光伏电板为了保证正常的发电效率,需要定期清洁或随时清洁;由于大多数光伏电板是采用倾斜布置的方式,目前市场上很多的清洁设备要么费用较高,要么清洁效果不好。而且光伏电板的安装位置不一定是很容易够得到,所以清洁起来也比较费时费力。
2、故此亟需开发一种清洁机器人结构来解决现有技术中的问题。
技术实现思路
1、本实用新型的目的在于提供一种清洁机器人结构,能够实现移动式自动清洁,整体结构空间小,适用更多场景,且结构简单,使用方便,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
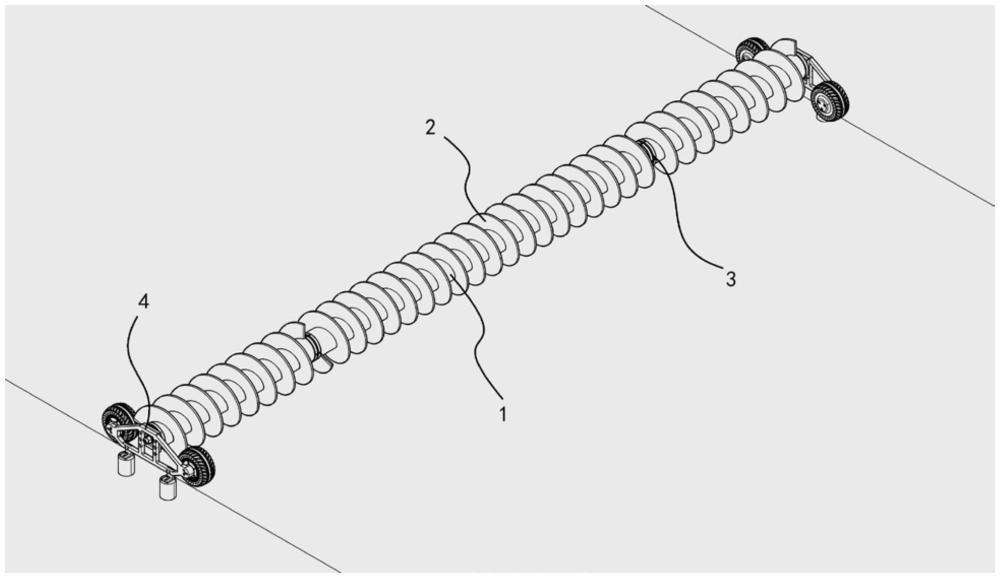
3、一种清洁机器人结构,包括用于支撑的辊筒,所述辊筒的两端均设有用于移动的车轮组件,所述辊筒内设有用于驱动车轮组件的驱动装置;所述辊筒上套接有用于清洁的滚刷,所述辊筒内设有用于驱动辊筒的驱动器。
4、作为本实用新型进一步的方案:所述辊筒为多段拼接式辊筒,相邻两辊筒通过辊筒连接件连接,所述辊筒内设有两个独立驱动装置用于驱动辊筒对应端的车轮组件。多段拼接式辊筒的设计,可以增大或缩小长度,便于不同宽度的设备清洁;独立的驱动装置能够有利于控制调整,便于纠偏。
5、作为本实用新型进一步的方案:所述驱动装置包括与电源连接的控制器,所述控制器控制连接在车轮组件上;所述电源及控制器均转动安装在辊筒内。
6、作为本实用新型进一步的方案:所述车轮组件包括支架,所述支架通过限位轴承转动安装在辊筒上;所述支架底端设有若干一体化电机滚轮。一体化电机滚轮不仅占用空间小,而且控制灵敏度较高,便于纠偏调整。
7、作为本实用新型进一步的方案:所述支架底端设有若干用于限位的限位轮。限位轮的设置便于清洁如光伏电板等倾斜物体,其中限位轮能够有效限位,防止清洁机器人掉落,进而保证清洁工作的顺利进行。
8、作为本实用新型进一步的方案:所述限位轮与所述支架转动连接,且转动方向与一体化电机滚轮的转动方向垂直。转动设置的限位轮能够有效防止与被清洁设备的边缘卡死,限位轮的转动方向与一体化电机滚轮的转动方向垂直,能够起到更好的限位效果,进而减少偏移情况的产生,从而减少纠偏,提高清洁效率。
9、作为本实用新型进一步的方案:所述驱动器包括驱动电机,所述驱动电机通过限位轴承转动安装在辊筒内,所述驱动电机的驱动轴驱动连接在辊筒连接件上。
10、作为本实用新型进一步的方案:所述驱动电机与所述辊筒连接件之间设有联轴器,所述驱动电机通过联轴器驱动连接在辊筒连接件上。联轴器的设置能够有效降低直接驱动的驱动疲劳,进而提高使用寿命。
11、作为本实用新型进一步的方案:所述支架上设有用于移动清洁机器人的无人机,所述无人机可拆卸式安装在所述支架上端。支架上设置的无人机,便于通过遥控控制无人机带动清洁机器人到达不易直接放置的设备上进行清洁操作。
12、与现有技术相比,本实用新型的有益效果是:本方案在辊筒上套接滚刷用于清洁,通过驱动器驱动辊筒持续转动实现持续性清洁;在辊筒的两端设置车轮组件用于实现移动清洁,该清洁机器人采用驱动装置和驱动器的上内置式结构,缩小整体结构的使用空间,便于用于更多的使用场景。
13、本实用新型的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
技术特征:
1.一种清洁机器人结构,其特征在于,包括用于支撑的辊筒,所述辊筒的两端均设有用于移动的车轮组件,所述辊筒内设有用于驱动车轮组件的驱动装置;所述辊筒上套接有用于清洁的滚刷,所述辊筒内设有用于驱动辊筒的驱动器。
2.根据权利要求1所述的一种清洁机器人结构,其特征在于,所述辊筒为多段拼接式辊筒,相邻两辊筒通过辊筒连接件连接,所述辊筒内设有两个独立驱动装置用于驱动辊筒对应端的车轮组件。
3.根据权利要求2所述的一种清洁机器人结构,其特征在于,所述驱动装置包括与电源连接的控制器,所述控制器控制连接在车轮组件上;所述电源及控制器均转动安装在辊筒内。
4.根据权利要求1或2或3所述的一种清洁机器人结构,其特征在于,所述车轮组件包括支架,所述支架通过限位轴承转动安装在辊筒上;所述支架底端设有若干一体化电机滚轮。
5.根据权利要求4所述的一种清洁机器人结构,其特征在于,所述支架底端设有若干用于限位的限位轮。
6.根据权利要求5所述的一种清洁机器人结构,其特征在于,所述限位轮与所述支架转动连接,且转动方向与一体化电机滚轮的转动方向垂直。
7.根据权利要求2所述的一种清洁机器人结构,其特征在于,所述驱动器包括驱动电机,所述驱动电机通过限位轴承转动安装在辊筒内,所述驱动电机的驱动轴驱动连接在辊筒连接件上。
8.根据权利要求7所述的一种清洁机器人结构,其特征在于,所述驱动电机与所述辊筒连接件之间设有联轴器,所述驱动电机通过联轴器驱动连接在辊筒连接件上。
9.根据权利要求4所述的一种清洁机器人结构,其特征在于,所述支架上设有用于移动清洁机器人的无人机,所述无人机可拆卸式安装在所述支架上端。
技术总结
本申请公开了一种清洁机器人结构。属于清洁技术领域,该结构能够实现移动式自动清洁,整体结构空间小,适用更多场景,且结构简单,使用方便。包括用于支撑的辊筒,所述辊筒的两端均设有用于移动的车轮组件,所述辊筒内设有用于驱动车轮组件的驱动装置;所述辊筒上套接有用于清洁的滚刷,所述辊筒内设有用于驱动辊筒的驱动器。
技术研发人员:万然,张旭生,柴少龙
受保护的技术使用者:点狮科技(浙江)有限公司
技术研发日:20230831
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!