一种永磁同步电机有限时间多源谐波抑制控制方法
本发明属于电力电子与电力传动,尤其涉及永磁同步电机非光滑控制和多源谐波治理领域。
背景技术:
1、永磁同步电机(permanent magnet synchronous motor,pmsm)因其功率密度高、结构简单、维护方便、调速方便等优点,被广泛应用于新能源电动汽车、数控机床、光刻机等领域。因比例积分(proportion integration,pi)控制器具有结构简单且易于实现的优点,pmsm调速系统通常采用它进行调节,但其“基于误差反馈来消除误差”的机理无法对系统内外扰动进行有效补偿,从而难以获得理想的调速控制性能。而且,pmsm的转矩脉动总是引起不希望的速度波动,会降低控制性能。pmsm转矩脉动来源可以总结如下。
2、1)齿槽转矩:齿槽转矩与转子位置呈周期函数。一般来说,它的分量的阶数是pmsm定子槽和转子极对的最低公倍数的几倍。
3、2)磁通谐波:非正弦磁通密度分布在气隙中产生磁通谐波,它们相互作用与定子电流并导致转矩波纹。
4、3)电流谐波:主要产生电流谐波从磁链谐波和逆变器非线性等方面也会与永磁磁通相互作用并产生转矩谐波。
5、4)电流测量误差:偏移误差和缩放误差会引起速度的一阶谐波转矩和二阶谐波转矩。
技术实现思路
1、发明目的:为了解决传统控制策略瞬时响应速度慢,鲁棒性差,转矩脉动较大的问题,本发明的目的在于提供一种永磁同步电机有限时间多源谐波抑制控制方法。该方法能够提高pmsm系统瞬态跟踪速度、稳态跟踪精度、鲁棒性与多源谐波干扰抑制能力。
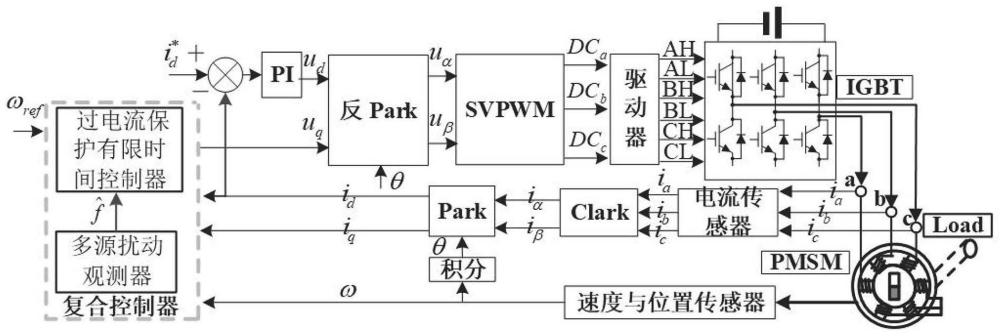
2、技术方案:为了实现上述发明,本发明采用技术方案具体为:参考转速ωref,反馈转速ω,反馈d轴电流id,反馈q轴电流iq,作为有过电流保护的有限时间控制器的输入,其输出为q轴参考电压uq;d轴参考电流0与反馈电流id做差,作为d轴电流控制器的输入,其输出为d轴参考电压ud;ud和uq经过反park变换为uα和uβ,uα和uβ作为svpwm的输入,其输出信号传递给驱动器;驱动器输出6路占空比信号给igbt模块;三路igbt的输出连接pmsm,实现pmsm的控制。
3、本发明的一种永磁同步电机有限时间多源谐波抑制控制方法,包括如下步骤:
4、s1:设计有过电流保护的速度-电流单环控制器;
5、根据永磁同步电机的实际情况构建其数学模型,根据数学模型获得矢量控制的永磁同步电机速度环和电流环控制系统,建立其速度与q轴电压的二阶方程,基于有限时间控制原理,设计出有限时间速度-电流单环控制器,该控制器的输入为参考转速ωref,永磁同步电机的反馈转速ω,d、q轴反馈电流id和iq,其输出为q轴参考电压;
6、s2:基于步骤s1设计的有限时间速度-电流单环控制器,设计过电流保护因子,得到有过电流保护的有限时间速度-电流单环控制器;
7、s3:基于步骤s1的构建永磁同步电机数学模型和步骤s2设计的有过电流保护的有限时间速度-电流单环控制器,设计多源谐波干扰观测器,该观测器的输入为反馈转速ω和q轴反馈电流iq,其输出为0,1,2…n次谐波,且谐波总和乘作为集总扰动;
8、s4:将多源谐波扰动观测器输出的集总扰动前馈给有过电流保护的有限时间速度-电流单环控制器,形成复合控制策略,实现永磁同步电机的速度、电流单环控制,并具有过电流保护功能。
9、进一步的,步骤s1具体为:
10、根据永磁同步电机的实际情况构建其数学模型,其数学模型表示为:
11、
12、
13、其中,r为相电阻,为对时间的一阶导数因子,由旋转坐标系下直轴交轴电压方程基本由三个量构成,分别为变压器电动势和旋转电动势ωeψq和ωeψd,电阻压降rid和riq,ld=lq=l为d、q轴电感,id,iq,r,l,np,j,b,ω,θ分别是d轴,q轴电流,定子电阻,电感,永磁体极对数,电机转动惯量,电机粘滞摩擦系数,电机的角速度和电角度;其中,ωe为电角速度,ωe=npω;tl表示负载转矩;
14、pmsm的机械运动方程表示为:
15、
16、根据数学模型获得矢量控制的永磁同步电机速度环和电流环控制系统,建立其速度与q轴电压的二阶方程:
17、
18、其中,为负载转矩tl的一阶导数;
19、基于有限时间控制原理,设计出有限时间速度-电流单环控制器,该控制器的输入为参考转速ωref,永磁同步电机的反馈转速ω,d、q轴反馈电流id和iq,其输出为q轴参考电压;
20、
21、其中,r为定子电阻,j为转动惯量,l为表贴式永磁同步电机的电感,np为极对数,ψf为永磁体磁链,id,iq,ω分别为d轴反馈电流,q轴反馈电流,反馈转速,ωref为参考转速,k1>0,k2>0,k3>0分别为比例增益,微分增益和积分增益,x1=ωref-ω,d为多源谐波扰动观测器输出的集总扰动,sigα(x)=sign(x)|x|α,0<α1<1,α2=2α1/(α1+1),1<β1<2,β2=2β1/(β1+1),1<p/q<2,且p和q均为奇数,m>0是惩罚系数,c为q轴电流约束值。
22、进一步的,步骤s2具体为:有过电流保护的有限时间速度-电流单环控制器被设计为:
23、
24、其中,r为定子电阻,j为转动惯量,l为表贴式永磁同步电机的电感,np为极对数,ψf为永磁体磁链,id,iq,ω分别为d轴反馈电流,q轴反馈电流,反馈转速,ωref为参考转速,k1>0,k2>0,k3>0分别为比例增益,微分增益和积分增益,x1=ωref-ω,d为多源谐波扰动观测器输出的集总扰动,为ωref的一阶导数,sigα(x)=sign(x)|x|α,0<α1<1,α2=2α1/(α1+1),1<β1<2,β2=2β1/(β1+1),1<p/q<2,且p和q均为奇数,m>0是惩罚系数,c为q轴电流约束值。
25、进一步的,步骤s3具体为:多源扰动观测器的输入为反馈转速ω和反馈q轴电流iq,其输出为0,1,2…n次谐波,且谐波总和乘作为集总扰动,j为转动惯量,np为极对数,ψf为永磁体磁链,该多源谐波扰动观测器被设计为:
26、
27、其中,为反馈转速ω的估计值,为估计的集总干扰,分别为1,2,…,n次谐波干扰估计值,d1,d2,...,dn为1,2,…,n次谐波干扰,分别为d1,d2,...,dn的导数,l0,l1,l2为观测器增益系数,为1次谐波带通滤波器,为2次谐波带通滤波器,同理,为n次谐波带通滤波器。
28、本发明还公开一种通信装置,包括处理器以及存储器,其中,所述存储器用于存储计算机程序;所述处理器用于执行所述计算机程序,以实现永磁同步电机有限时间多源谐波抑制控制方法。
29、本发明还公开一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现永磁同步电机有限时间多源谐波抑制控制方法。
30、有益效果:与现有技术相比,本发明具有如下显著优点:
31、(1)相比于传统的级联型控制方式,速度环和电流环各需要一个,需要调整的控制器参数较多,且级联控制方式降低了控制带宽;本发明所提的有过电流保护的有限时间速度-电流单环控制,仅使用一个控制器同时控制速度和电流,提高了控制带宽;而且引入了过电流保护因子,保证了硬件系统的安全性;该种控制方式能够更好的平衡系统的瞬态性能与稳态跟踪精度。
32、(2)相比于传统的自抗扰控制算法,往往将所有谐波干扰作为集总干扰,然后采用扩张状态观测器进行估计并补偿给系统,传统的扩张状态观测器无法很好地处理高次谐波;本发明提出的多源谐波扰动观测器,可以同时观测1次到n次等高次谐波,最大限度的跟踪与补偿系统谐波,极大的降低了高次谐波引起的转矩脉动。
33、(3)本发明提出的有过电流保护的有限时间速度-电流单环控制器和多源谐波扰动观测器复合控制策略,极大的改善了系统的瞬态跟踪性能、稳态跟踪精度、谐波扰动抑制能力。
- 还没有人留言评论。精彩留言会获得点赞!