一种旋转导向钻井工具亚全驱系统的被动容错控制方法
本发明属于动态系统容错控制领域,具体涉及一种旋转导向钻井工具亚全驱系统的被动容错控制方法。
背景技术:
1、旋转导向钻井工具是深海深地油气资源开采的关键设备,需要在恶劣的井下环境中长期运行。在复杂地质条件下,钻头部件将持续受到外部冲击,从而在系统控制模型中引入不确定动态。此外,冲击极易导致指向电机故障,给钻进轨迹的精确跟踪带来巨大挑战。
技术实现思路
1、针对含有不确定性与执行器故障的旋转导向钻井工具系统,本发明提出了一种旋转导向钻井工具亚全驱系统的被动容错控制方法,开发了一种基于亚全驱方法的容错控制率,能够在指向电机发生故障的情况下保证工具面角跟踪误差的有界性。
2、本发明的技术方案如下:
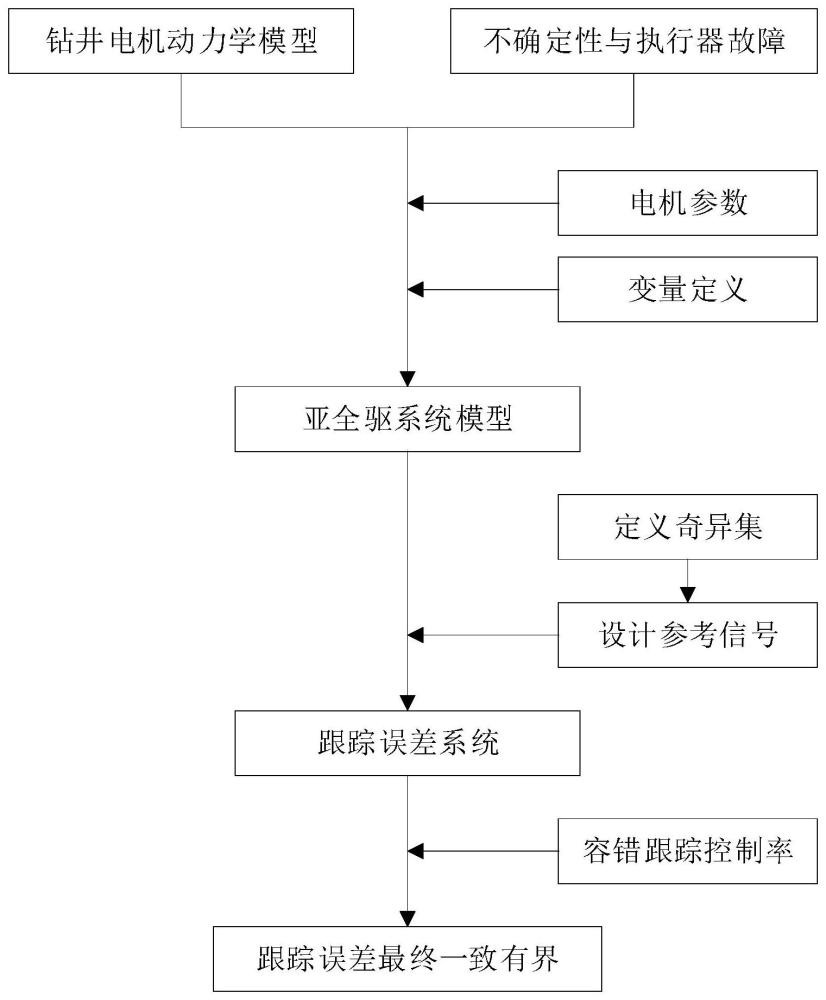
3、一种旋转导向钻井工具亚全驱系统的被动容错控制方法,包括如下步骤:
4、步骤1、建立包含执行器故障与不确定性的旋转导向钻井工具亚全驱系统模型;
5、步骤2、计算亚全驱系统模型的奇异集并设计待跟踪的参考轨迹;
6、步骤3、设计亚全驱系统容错跟踪控制律。
7、进一步地,所述步骤1的具体过程为:
8、步骤1.1、搭建以永磁同步电机为核心装置的钻井工具动力学模型;
9、
10、其中,为d-q坐标系下d轴的定子电流分量的一阶导数;为d-q坐标系下q轴的定子电流分量的一阶导数;为电机转速的一阶导数;为工具面角的一阶导数;ld、lq分别为d轴、q轴的电感分量;ud、uq分别为d轴、q轴的定子电压;rs为绕组阻抗;id、iq分别为d-q坐标系下d轴、q轴的定子电流分量;pn为电机极对数;ωm为电机转速;ψ为永磁体磁通;j为总转动惯量;tl为负载转矩;为摩擦系数;ωh为钻铤转速;为工具面角;
11、步骤1.2、结合产品规格书,通过直接测量或辨识方法获取系统各项参数,包括ld、lq、rs、ψ、pn、j、ωh;
12、步骤1.3、定义状态变量控制输入u=[u1u2]t=[ud uq]t,将式(1)的钻井工具动力学模型进一步转化为如式(2)所示的亚全驱系统模型;
13、
14、其中,x1对应亚全驱系统模型中的工具面角x2对应亚全驱系统模型中d-q坐标系下d轴、q轴的定子电流分量的乘积idiq,x3对应亚全驱系统模型中q轴的定子电流分量iq;u1、u2分别对应亚全驱系统模型中d轴、q轴的定子电压ud、uq;上角标t为转置;为x1的三阶导数;为x3的一阶导数;x(0~2)为由状态变量x的第0~2阶导数构成的向量,即为由x1的第0~2阶导数构成的向量,即分别为x1的一阶、二阶导数;f1(x(0~2)),f2(x(0~2))均为已知的非线性函数,代表钻井工具亚全驱系统模型中的非线性动力学;k1、k2、k3、k4均为已知常数,δf(x(0~2))为未知的不确定项,且满足:
15、||δf(x(0~2))||≤ρ(x(0~2)) (3);
16、其中,‖·‖表示向量的二范数,ρ(x(0~2))为不确定项的上界函数;
17、步骤1.4、在亚全驱系统模型中引入执行器乘性故障η(t)与加性故障ξ(t),并将式(2)改写为以下形式:
18、
19、其中,i2为二阶单位阵;t为时间;乘性故障η(t)=diag{η1(t),η2(t)}与加性故障ξ(t)=[ξ1(t) ξ2(t)]t均是时变未知的,diag{η1(t),η2(t)}表示对角线元素为η1(t)与η2(t)的二阶对角阵,η1(t)、η2(t)分别为影响u1、u2的乘性故障,ξ1(t)、ξ2(t)分别为影响u1、u2的加性故障;b(x)为控制增益阵,在无故障的情况下η(t)=02×2,ξ(t)=02×1,在有故障时二者需满足:
20、
21、其中,ηi(t)为乘性故障,i为1时,为乘性故障η1(t),i为2时,为乘性故障η2(t);c为乘性故障η1(t)与η2(t)的共同上界;δ0、δ1分别为加性故障ξ(t)及其导数的范数上界;c、δ0、δ1均为正实数;为加性故障ξ的一阶导数;
22、步骤1.5、通过历史测量数据辨识不确定项的上界函数ρ(x(0~2))以及故障界的正实数c、δ0、δ1。
23、进一步地,所述步骤2的具体过程为:
24、步骤2.1、定义亚全驱系统模型(4)的奇异集为:
25、
26、其中,x为r维实数空间中的向量;detb(x)表示矩阵b(x)的行列式;r等于亚全驱系统模型(4)转化为状态空间模型后的状态维数;
27、步骤2.2、将参考轨迹xd=[x1d x2d x3d]t与奇异集间的距离记作dd,其定义如下:
28、
29、其中,x1d、x2d、x3d分别为x1、x2、x3的参考轨迹;为由参考轨迹xd的第0~2阶导数构成的向量,即为由x1d的第0~2阶导数构成的向量,即分别为x1d的一阶与二阶导数;inf{·}表示取最小值;z为奇异集中的向量;
30、步骤2.3、设计一组常系数a0,a1,a2,a3使得下列矩阵(8)是hurwitz的,并设计正定阵p与正实数μ使得不等式(9)成立;
31、
32、φt(a)p+pφ(a)≤-μp (9);
33、其中,φ(a)表示由系数a0,a1,a2,a3构成的常数方阵;a=[a0 a1 a2 a3]t;
34、步骤2.4、设计参考轨迹xd(t)并使其满足以下条件:
35、
36、
37、其中,λmin(p)表示矩阵p的最小特征值;max{·}表示取最大值;ε为正实数;δ定义为:
38、
39、其中,δ为δ0和δ1的非线性组合。
40、进一步地,所述步骤3的具体过程为:
41、步骤3.1、定义跟踪误差如下:
42、
43、其中,z(i)、x(i)、分别为跟踪误差z、状态变量x、参考轨迹xd的i阶导数;
44、原亚全驱系统模型式(4)进一步转化为以下形式:
45、
46、其中,为跟踪误差z的首个分量z1的三阶导数;为跟踪误差z的第三个分量z3的一阶导数;z(0~2)为由跟踪误差z的第0~2阶导数构成的向量,即为由z1的第0~2阶导数构成的向量,即分别为z1的一阶与二阶导数;b(z,t)对应控制增益阵b(x),即b(z,t)=b(x);为x1d的三阶导数;为x3d的一阶导数;
47、步骤3.2、将式(14)转化为状态空间模型:
48、
49、其中,z1为跟踪误差z的首个分量;分别为z1的一阶、二阶导数;z3为跟踪误差z的第三个分量;φ(0)为a=0时的φ(a),即记f(z(0~2),t)=[f1(z(0~2),t)f2(z(0~2),t)]t,
50、步骤3.3、针对上述一阶系统设计容错镇定控制率,控制输入u的计算公式为:
51、u=-b-1(z,t)(u0+ur+ua) (16);
52、其中,u0、ur、ua分别为基础控制分量、鲁棒控制分量、自适应控制分量;具体计算公式如下:
53、
54、其中,a为由系数a0,a1,a2,a3构成的常数矩阵;pl与p有关的常数矩阵;为中间变量;为加性故障ξ的自适应估计值;具体计算公式如下:
55、
56、其中,ρ(z(0~2),t)=ρ(x(0~2));σ(z(0~2),t)为中间变量;符号cond(b(z,t))表示b(z,t)的条件数;为的一阶导数;
57、步骤3.4、将控制器(16)用原物理系统中的变量表示,并将电机定子电压ud与uq设置为对应输入,此时跟踪误差系统是最终一致有界的。
58、本发明所带来的有益技术效果:
59、本发明针对含有不确定性与执行器故障的旋转导向钻井工具系统,开发了一种基于亚全驱方法的容错控制率,能够在指向电机发生故障的情况下保证工具面角跟踪误差的有界性。与传统的基于状态空间模型的电机控制方法相比,控制率的设计更加便利。
- 还没有人留言评论。精彩留言会获得点赞!