一种基于VCSEL激光器的无人机无线传能系统的制作方法
本发明涉及光电,尤其涉及一种基于vcsel激光器的无人机无线传能系统。
背景技术:
1、当前无人机动力能源主要有燃油发动机和电池储能两种形式,电池驱动具有噪声小、重量轻等特点,因此成为当前无人机的主要发展方向。但是电池的储能是有限的,无人机迫切需要解决长航程的续能问题。随着科技的进步发展,特别是无线能量传输技术的发展,无人机无线能量续能成为可能
2、无线能量传输(wireless power transmission,wpt)是一种“非接触式”能量传输方式,通过发射器将电能转换为其它形式的中继能量(如光、微波等),隔空传输一段距离后,再通过接收器将中继能量转换为电能,实现无线电能传输的传输方式。激光和微波,已被公认为两种最好的无线传能方式。激光无线能量传输是近十几年来发展起来的一项新技术,激光具有单色性好、方向性强、能量集中等特点,可将光能远距离传输到配备有光电转换器件的用电设备上,为其提供源源不断的能源保障。而且激光作为载体进行能量传输时,一般而言,相比于微波传能具有设备体积较小、传输距离较远、无电磁干扰的特点,发展前景十分广阔。
3、目前常用的无人机激光无线充电的方式主要包括两种,一种是将传统边发射半导体808nm波段的激光器作为发射端,通过gaas光电池完成光电转化,但是传统边发射半导体808nm波段的激光器激射的激光光束质量较差,m2通常达30以上,光斑大、发散快,对实现带来了一定的困难。这种方法难以适用于无人机这种数百米级长距离应用。第二种是采用1064nm掺镱(yb)光纤激光器通过ingaas光电池完成光电转化的方式,这种方法结构简单,激射的1064nm激光光束质量好,光斑小,发射角小,但是针对1064nm波段工作的ingaas光电池光电转化效率低,从而导致在无人机的接收端有严重的散热问题,严重制约无人机激光无线充电系统在各方面中的应用。且这两种方案都需要采用机械云台来对光束出射方向进行操控,灵敏度低,操纵困难。
技术实现思路
1、本发明提供了一种基于vcsel激光器的无人机无线传能系统,能够解决目前常见无人机激光无线充电系统光束质量差,光电转换效率低,光束操纵困难的问题。
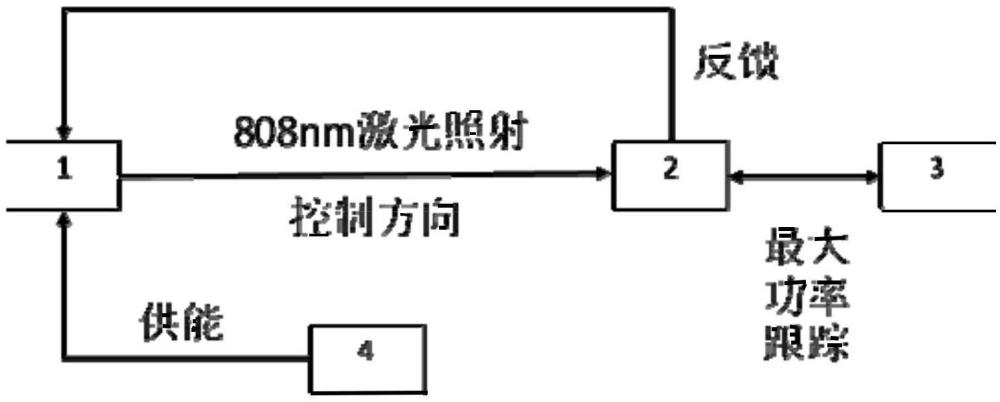
2、第一方面,本发明提供了一种基于vcsel激光器的无人机无线传能系统,包括:vcsel相控阵列激光器、光电池接收系统、最大功率跟踪控制电路系统和驱动系统;vcsel相控阵列激光器发射连续激光;光电池接收系统接收连续激光,并将连续激光转化为电能;最大功率跟踪控制电路系统监测无人机的负载功率和光电池接收系统的工作状态,基于无人机的负载功率和光电池接收系统的工作状态,调节光电池接收系统的工作状态;驱动系统与vcsel相控阵列激光器连接,为vcsel相控阵列激光器供电。
3、在一种可能的实现方式中,vcsel相控阵列激光器接收无人机的位置,基于无人机的位置,确定vcsel相控阵列激光器的偏转角度,基于vcsel相控阵列激光器的偏转角度,确定vcsel相控阵列激光器中各阵列单元之间的目标相位差,调整vcsel相控阵列激光器中各阵列单元之间的相位差至目标相位差,实现vcsel相控阵列激光器的光束角度的操控。
4、在一种可能的实现方式中,光电池接收系统包括gaas光电池。
5、在一种可能的实现方式中,vcsel相控阵列激光器为可调控发射方向的相控阵列激光器。
6、在一种可能的实现方式中,vcsel相控阵列激光器中各阵列单元之间间距小于设定值,各阵列单元间相位关系固定,波长一致。
7、第二方面,本发明实施例提供了一种基于vcsel激光器的无人机无线传能系统的控制方法,应用于第一方面及任一种可能的实现方式的无人机无线传能系统,该控制方法包括:获取光电池接收系统的工作状态;若光电池接收系统工作在充电状态,则确定光电池接收系统的最大充电功率;基于光电池接收系统的最大充电功率,以及无人机的负载功率,确定无人机的可承载功率;若可承载功率大于等于最大功率状态,则确定最大功率跟踪控制电路系统以最大功率状态为无人机充电;若可承载功率小于最大功率状态,则确定最大功率跟踪控制电路系统以稳压状态为无人机充电。
8、在一种可能的实现方式中,该控制方法还包括:若光电池接收系统工作在饱和状态,则确定最大功率跟踪控制电路系统以稳压状态为无人机充电。
9、在一种可能的实现方式中,该控制方法还包括:监测无人机的位置;基于无人机的位置,确定vcsel相控阵列激光器的偏转角度;基于vcsel相控阵列激光器的偏转角度,确定vcsel相控阵列激光器中各阵列单元之间的目标相位差;调整vcsel相控阵列激光器中各阵列单元之间的相位差至目标相位差,实现vcsel相控阵列激光器的光束角度的操控。
10、在一种可能的实现方式中,该控制方法还包括:获取最大功率跟踪控制电路系统的最大跟踪功率;基于最大跟踪功率,确定驱动系统的控制参数;基于控制参数,控制驱动系统工作,使vcsel相控阵列激光器发射的连续激光的功率与最大跟踪功率匹配。
11、第三方面,本发明实施例提供了一种无线传能设备,该无线传能设备包括存储器和处理器,该存储器存储有计算机程序,所述处理器用于调用并运行所述存储器中存储的计算机程序时执行如上述第一方面以及第一方面中任一种可能的实现方式所述方法的步骤。
12、本发明提供一种基于vcsel激光器的无人机无线传能系统,与现有技术先比,本发明使用vcsel相控阵列激光器代替传统的边发射半导体激光器和1064nm光纤激光器,使发射端光束质量优化,提高光电转化效率,且相控阵技术可以控制阵列激光光束在空间上发生偏转,实现对光束的操控,始终保证激光能够准确瞄准到光电池接收系统,有利于长距离无人机激光无线充电。本发明使用最大功率跟踪控制电路系统实现最大功率点工作,从而最大化利用光电池的功率,提高系统的发电效率。
技术特征:
1.一种基于vcsel激光器的无人机无线传能系统,其特征在于,包括:vcsel相控阵列激光器、光电池接收系统、最大功率跟踪控制电路系统和驱动系统;
2.根据权利要求1所述的基于vcsel激光器的无人机无线传能系统,其特征在于,所述vcsel相控阵列激光器接收所述无人机的位置,基于所述无人机的位置,确定vcsel相控阵列激光器的偏转角度,基于所述vcsel相控阵列激光器的偏转角度,确定vcsel相控阵列激光器中各阵列单元之间的目标相位差,调整所述vcsel相控阵列激光器中各阵列单元之间的相位差至所述目标相位差,实现所述vcsel相控阵列激光器的光束角度的操控。
3.根据权利要求1所述的基于vcsel激光器的无人机无线传能系统,其特征在于,所述光电池接收系统包括gaas光电池。
4.根据权利要求1所述的基于vcsel激光器的无人机无线传能系统,其特征在于,所述vcsel相控阵列激光器为可调控发射方向的相控阵列激光器。
5.根据权利要求4所述的基于vcsel激光器的无人机无线传能系统,其特征在于,所述vcsel相控阵列激光器中各阵列单元之间间距小于设定值,各阵列单元间相位关系固定,波长一致。
6.一种基于vcsel激光器的无人机无线传能系统的控制方法,其特征在于,应用于如权利要求1-5中任一项所述的无人机无线传能系统,所述控制方法包括:
7.根据权利要求6所述的基于vcsel激光器的无人机无线传能系统的控制方法,其特征在于,所述控制方法还包括:
8.根据权利要求6所述的基于vcsel激光器的无人机无线传能系统的控制方法,其特征在于,所述控制方法还包括:
9.根据权利要求6所述的基于vcsel激光器的无人机无线传能系统的控制方法,其特征在于,所述控制方法还包括:
10.一种无线传能设备,其特征在于,所述无线传能设备包括存储器和处理器,该存储器存储有计算机程序,所述处理器用于调用并运行所述存储器中存储的计算机程序执行如权利要求6至9中任一项所述方法的步骤。
技术总结
本发明提供一种基于VCSEL激光器的无人机无线传能系统,涉及光电技术领域。本发明使用VCSEL相控阵列激光器代替传统的边发射半导体激光器和1064nm光纤激光器,使发射端光束质量优化,提高光电转化效率,且相控阵技术可以控制阵列激光光束在空间上发生偏转,实现对光束的操控,始终保证激光能够准确瞄准到光电池接收系统,有利于长距离无人机激光无线充电。本发明使用最大功率跟踪控制电路系统实现最大功率点工作,从而最大化利用光电池的功率,提高系统的发电效率。
技术研发人员:马汉超,王媛媛,孙芮,冯晨阳,孙奕涛,房玉锁,王胜福,崔璐,张厚博,张港,李晓红,李松松,孙永茂,郭志强,郝岩,滑国红
受保护的技术使用者:中国电子科技集团公司第十三研究所
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!