一种直流偏置混合励磁电机最大转矩电流比控制系统及方法
本发明属于电机驱动与控制领域,具体涉及一种直流偏置混合励磁电机最大转矩电流比控制策略。
背景技术:
1、永磁同步电机已广泛应用于电动汽车和船舶推进等领域。然而,永磁同步电机的磁场很难调节。为此,在永磁同步电机中引入了励磁绕组,以实现磁场调节能力的改善。虽然引入励磁绕组提高了磁场调节能力,但也带来了电枢绕组和励磁绕组之间的空间竞争,降低了电机转矩密度。直流偏置混合励磁电机是近年来新提出的一种混合励磁电机,该电机使用直流偏置电枢电流实现混合励磁,消除了励磁绕组,大大提高了混合励磁电机的性能。该电机的电枢电流由直流和交流两部分组成,其控制策略与传统混合励磁电机以及广泛应用的交流电机不同,然而目前对于其控制策略的研究较少。由于在该电机中直流电流和交流电流共同产生转矩,因此需要对这两种电流的比例进行适当配置。通过最大转矩电流比控制,实现固定电流有效值下转矩的最大化输出,是提高该电机性能有效途径之一。为了实现最大转矩电流比控制,现有方法包括公式法,查表法,搜索法和信号注入法等。近年来,信号注入策略受到重点关注,信号注入策略主要分为实际信号注入和虚拟信号注入。实际信号注入是通过向电机注入扰动信号并观察由此产生的转矩扰动来获得最佳电流矢量角。然而,这种策略往往会给电机带来额外的损耗,且收敛速度非常慢。虚拟信号注入是通过抽象出一个虚拟转矩或功率模型,并将信号注入该模型以获得最大转矩电流比判据,从而解决实际信号注入带来的问题。但是这种控制策略往往依赖于电机高精度模型参数,而且在算法中往往会忽略转矩方程高阶偏导数的影响,其精度略显不足。
2、综上分析,对于直流偏置混合励磁电机而言,需要一种高效准确的最大转矩电流比控制策略来保证电机的高效运行。
技术实现思路
1、本发明的目的是,针对现有直流偏置混合励磁电机最大转矩电流比控制策略的不足,提出一种直流偏置混合励磁电机最大转矩电流比控制方法。首先,在旋转坐标系中推导出电机数学模型和逆变器非线性模型,通过使用双虚拟方波信号注入,在一定程度上消除了忽略高阶导数带来的影响。控制中考虑了电压源逆变器非线性的影响,从而提高了控制策略的精度。此外,本发明将牛顿拉夫逊法应用于控制系统中,改善了控制策略的动态响应。本发明能快速而精准的实现最大转矩电流比控制,提高了直流偏置混合励磁电机的运行效率。
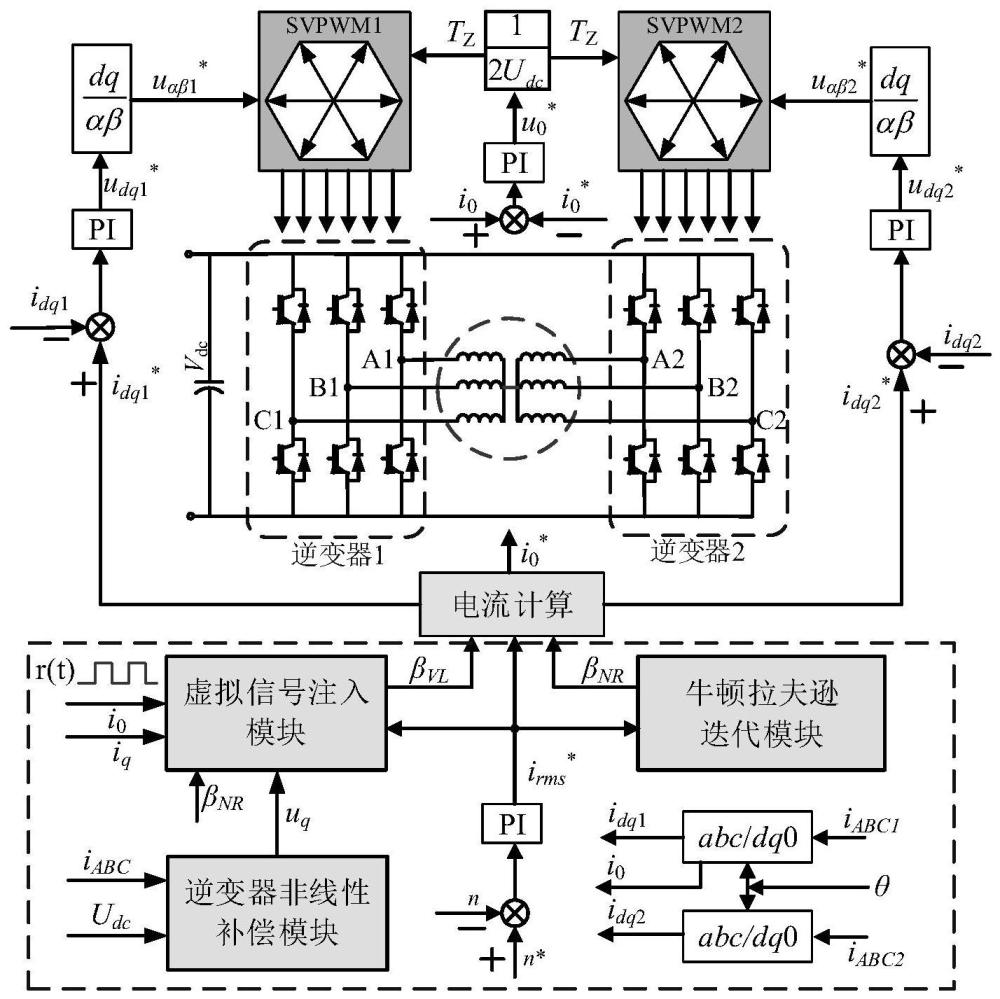
2、本发明是采取以下技术方案来实现的:一种直流偏置混合励磁电机最大转矩电流比控制系统,其特征在于,包括转速pi控制器、电流计算模块、电流pi控制器、虚拟信号注入模块、逆变器非线性补偿模块、牛顿拉夫逊迭代模块、svpwm载波调制模块、电压源逆变器模块、零序电流注入模块和传感器模块;
3、所述转速pi控制器输入端口为参考转速,输出端口为参考相电流有效值,通过对转速反馈误差进行比例积分调节,得到参考相电流有效值;
4、所述电流计算模块输入端口为参考相电流有效值,输出端口为dq0轴下的参考电流,通过对相电流有效值进行分配,计算得到针对不同工况下的交流电流和直流电流的幅值,以此作为参考电流进行电流闭环控制;
5、所述电流pi控制器输入端口为dq0轴下的参考电流,输出端口为dq0轴下的参考电压,通过对电流反馈误差进行比例积分调节,得到dq0轴下的参考电压;
6、所述虚拟信号注入模块,通过对注入的双方波虚拟信号进行处理,得到所需要的最大转矩电流比判据,对该判据进行积分处理,可提取到对应不同工况下的最佳电流矢量角;
7、所述逆变器非线性补偿模块,通过对电压源逆变器非线性建模,消除用电压控制器端口电压代替实际绕组端输入电压带来的控制误差,端口输出的电压源逆变器非线性误差直接用于双方波虚拟信号处理中,实现信号注入模块的高精度控制;
8、所述牛顿拉夫逊迭代模块用于减少最佳电流矢量角的获取时间,通过对转矩公式重新梳理,将求取最佳电流矢量角问题转化为复杂函数的极值点问题,通过构建迭代函数,经过简单迭代处理使得电流矢量角快速逼近最佳电流矢量角,减少信号注入模块的积分时间;
9、所述svpwm载波调制模块输入端口为坐标变换获得的两相静止坐标系下的参考电压,输出端为pwm调制波,采用8个逆变器空间电压矢量的切换以获得圆形旋转磁场,实现对参考电压的调制;
10、所述电压源逆变器模块,用于对直流母线电压进行逆变处理,逆变所得电压用于直流偏置混合励磁电机的驱动控制;
11、所述零序电流注入模块,通过在两套svpwm载波调制模块中,在保证6个非零电压矢量u1、u2、u3、u4、u5、u6作用时间不变的前提下,调整零电压矢量u0和u7的作用时间,实现零序电流的注入;
12、所述传感器模块,用于获取电机运行中的转子位置信息和进行电流采样,并将传感器获取的信息作为负反馈,对电机进行闭环控制。
13、具体地说,本发明是采取以下的技术方案来实现的:一种直流偏置混合励磁电机最大转矩电流比控制方法,包括以下步骤:
14、步骤1:根据电机的六阶电感矩阵数据和六相磁链数据,结合交流部分和直流部分的电流关系,推导该电机在直流偏置电流参与励磁情况下的dq0轴坐标系下直流偏置混合励磁电机电压数学模型和转矩数学模型;
15、步骤2:根据逆变器开关的死区时间、续流二极管压降和igbt开关管导通关断时间对电压源逆变器非线性特性进行分析,结合直流偏置混合励磁电机的零序电流励磁特性,建立详细的电压源逆变器非线性模型,得到在直流偏置电流注入后,由于电压源逆变器非线性带来的参考电压和逆变器端口实际电压之间的电压误差;
16、步骤3:根据步骤1中推导得到dq0轴坐标系下直流偏置混合励磁电机数学模型,采用双虚拟方波信号注入,将两个相反的虚拟方波信号分别注入到电流矢量角中,并构建对应的两个虚拟转矩,将两个虚拟转矩模块处理得到的最大转矩电流比判据做差,以此消除泰勒展开中因为忽略高阶导数项带来的误差,获得精准的最佳电流矢量角,最佳电流矢量角将用于电流计算模块,得到最大转矩电流比控制下的dq0轴参考电流;
17、步骤4:根据步骤2中建立的详细电压源逆变器非线性模型,计算出电压源逆变器非线性带来的参考电压和逆变器端口实际电压之间的电压误差,pi控制器端口电压和电压误差同时作为高频虚拟转矩的输入量代替实际电压,此时考虑到电压源逆变器非线性模型的高频虚拟转矩将更加符合实际情况下的转矩方程,控制精度得到提高;
18、步骤5:通过对转矩数学模型进行分析,重新梳理转矩公式,并对转矩进行求偏导处理,将复杂的最佳电流矢量角求取问题转化为简单的偏导函数的极值求取问题;
19、步骤6:对步骤5中的偏导函数进一步求导,通过牛顿拉夫逊迭代法,构建包含一阶偏导项和二阶偏导项的迭代公式,确定初值后通过简单的迭代处理,使得电流矢量角快速逼近最佳值,所得的电流矢量角作为步骤3中双方波虚拟信号注入的初始角度,减少积分时间;
20、步骤7:根据步骤6和步骤3得到的最佳电流矢量角对电流有效值irms进行分配,得到对应的d轴参考电流,q轴参考电流和0轴电流参考值,分别通过pi控制器调节为d轴电压参考值,q轴电压参考值和0轴电压参考值;
21、步骤8:将步骤7中的旋转坐标系下的dq0轴参考电压,经过park旋转坐标变换得到两相静止坐标系下的αβ轴参考电压,αβ轴参考电压将作为svpwm模块的输入,采用8个逆变器空间电压矢量u0、u1、u2、u3、u4、u5、u6和u7的切换以获得圆形旋转磁场,实现对αβ轴参考电压的调制,所得pwm调制波作用于逆变器开关器件,采用两套svpwm共同作用实现对直流偏置混合励磁电机的驱动控制;
22、步骤9:步骤7中的0轴参考电压经过pi控制器调节后将作为零矢量作用时间调节的参考值,利用步骤8中两套svpwm中的零矢量u0和u7的互补性和不对称性调制出零序电压以产生零序电流,对于第一套绕组,减少u0矢量的作用时间,增加相同的u7矢量的作用时间,对于第二套绕组,减少u7矢量的作用时间,增加相同的u0矢量的作用时间,而对两套绕组中的非零电压矢量作用时间不做改变,即可调制出正向的零序电流,反之则调制出负向的零序电流。
23、进一步,步骤1中电流数学模型为:
24、
25、式中,id1为第一套绕组的d轴电流,iq1为第一套绕组的q轴电流,i01为第一套绕组的0轴电流,id2为第二套绕组的d轴电流,iq2为第二套绕组的q轴电流,i02为第二套绕组的0轴电流,由于两套绕组电流直流部分相同,交流部分相反,可用id表示d轴电流,iq表示q轴电流,i0表示0轴电流。
26、进一步,步骤1中电压数学模型为:
27、
28、
29、式中,lm是耦合电感的零次谐波分量,l0是耦合电感的一次谐波分量,ψpm是永磁体磁链,ωe是电机电角速度,rs是定子电阻,ud1为第一套绕组的d轴电压,uq1为第一套绕组的q轴电压,u01为第一套绕组的0轴电压,ud2为第二套绕组的d轴电压,uq2为第二套绕组的q轴电压,u02为第二套绕组的0轴电压,ud为两套绕组的d轴电压的平均值,uq为两套绕组的q轴电压的平均值,u0为两套绕组的0轴电压绝对值的平均值。
30、进一步,步骤1中转矩数学模型为:
31、te=3npiq(l0i0+ψpm)
32、式中,np是极对数,te为电磁转矩、ψpm为永磁体磁链,iq为q轴电流,i0为0轴电流。
33、进一步,步骤2中逆变器非线性模型推导步骤如下:
34、步骤2.1:在电机实际控制中,通常使用参考电压来代替实际电压,考虑到逆变器非线性的影响,参考电压和实际电压的关系可表示为:
35、
36、式中,u*d是pi控制器侧d轴参考电压,u*q是pi控制器侧q轴参考电压,ueri d是逆变器非线性造成的d轴误差电压,uerr q是逆变器非线性造成的q轴误差电压,u d是d轴实际电压,u q是q轴实际电压;
37、步骤2.2:逆变器非线性包含三个部分,即死区时间电压、逆变器的开关时间和压降以及直流母线电压的测量误差,误差电压数学模可表示为:
38、
39、式中,dd和dq是死区电压畸变系数,vdead是死区电压造成的电压误差,rcd是逆变器功率器件的电阻,δu是母线电压畸变项,是电压矢量与q轴的夹角,id为d轴电流,iq为q轴电流;
40、步骤2.3:根据步骤2.2中所述逆变器非线性模型,起主要作用的是死区电压造成的电压误差,死区电压畸变系数可表示为:
41、
42、式中,sgn为符号函数,ia为第一套绕组a相电流,ib为第一套绕组b相电流,ic为第一套绕组c相电流,vdead主要受死区时间影响;
43、步骤2.4:根据步骤2.2中所述逆变器非线性模型,死区电压造成的电压误差可表示为
44、
45、式中,td表示死区时间,toff表示igbt关断时间,ton表示igbt导通时间,udc表示母线电压,uce0表示二极管压降,ud0表示igbt压降;
46、步骤2.5:根据步骤2.3和步骤2.4中所述逆变器非线性模型,参考电压方程可重新表示为:
47、
48、式中,u*d是pi控制器侧d轴参考电压,u*q是pi控制器侧q轴参考电压,lm是耦合电感的零次谐波分量,l0是耦合电感的一次谐波分量。
49、进一步,步骤3中双虚拟方波信号注入步骤如下:
50、步骤3.1:根据dq0轴电流关系,dq0轴电流和相电流有效值关系可表示为
51、
52、式中,γ为交流部分电流矢量iac和q轴夹角,β为相电流irms和交流部分电流矢量iac夹角,id为d轴电流,iq为q轴电流,i0为0轴电流,irms为相电流有效值;
53、步骤3.2:根据步骤3.1中所述dq0轴电流和相电流有效值关系,转矩方程可重新表示为
54、
55、步骤3.3:所需双方波虚拟信号可表示为
56、
57、
58、式中,a是注入信号的幅值,n是自然数,t是时间,tr是注入信号的周期;
59、步骤3.4:根据步骤3.3中所述双方波虚拟信号,信号注入后的高频虚拟转矩可表示为
60、
61、式中,r1和r2为注入的双方波虚拟信号;
62、步骤3.5:根据泰勒定理对步骤3.4所述高频虚拟转矩泰勒展开,高频虚拟转矩可重新表示为
63、
64、步骤3.6:根据步骤3.5所述高频虚拟转矩,两个高频虚拟转矩做差后,判据公式可表示为
65、
66、步骤3.7:根据步骤3.5所述判据公式,对判据公式通过pi控制器进行调节控制,得到所需的最佳转矩矢量角。
67、进一步,步骤4中逆变器非线性模型对参考电压进行补偿步骤如下:
68、步骤4.1:根据步骤2.5所述参考电压模型,补偿后的实际电压可表示为
69、
70、式中,ud为d轴电压,uq为q轴电压,dd和dq是死区电压畸变系数,vdead是死区电压造成的电压误差,u*d是pi控制器侧d轴参考电压,u*q是pi控制器侧q轴参考电压;
71、步骤4.2:根据步骤4.1所述补偿后的实际电压和步骤和步骤3.3中所述信号注入后的高频虚拟转矩,补偿后的高频转矩方程可表示为
72、
73、式中,np为极对数,iq为q轴电流,i0为0轴电流,l0为耦合电感一次分量,r1和r2为注入的双方波虚拟信号,ωe为电角速度,rs为电阻,β为电流矢量角。
74、进一步,步骤6中牛顿拉夫逊迭代法步骤如下:
75、步骤6.1:根据步骤5中所述方法对转矩方程重新梳理,梳理后的转矩方程可表示为
76、te=δt·irms cosβ(δk+irms sinβ)
77、式中,δk=ψpm/l0,irms为相电流有效值,β为电流矢量角;
78、步骤6.2:根据牛顿拉夫逊迭代法,设计迭代方程为
79、
80、式中,f(β)是构建的目标函数,f(β)是目标函数的偏导数函数;
81、步骤6.3:根据步骤6.2中所述迭代函数进行迭代,通过选择适当的迭代初值,只需几次迭代就能得到所需的电流矢量角βnr,它与通过虚拟信号注入得到的电流矢量βvl一起构成了最佳电流矢量角βmtpa。
82、进一步,步骤9中零序电流注入步骤如下:
83、步骤9.1:根据步骤6.3所述最佳电流矢量角计算出相应的参考电流,参考电流计算公式可表示为
84、
85、式中,βmtpa为最佳电流矢量角,irms为相电流有效值,γ为交流部分电流矢量iac和q轴夹角,i*d为d轴参考电流,i*q为q轴参考电流,i*0为0轴参考电流;
86、步骤9.2:根据步骤9.1所述参考电流,通过pi控制器得到相应的零序电压,计算零序电压对应的零电压矢量作用时间;
87、步骤9.3:根据步骤9.2所述零电压矢量作用时间,利用两套svpwm中的零矢量u0和u7的互补性和不对称性调制出零序电压以产生零序电流,对于第一套绕组,减少u0矢量的作用时间,增加相同的u7矢量的作用时间,对于第二套绕组,减少u7矢量的作用时间,增加相同的u0矢量的作用时间,而对两套绕组中的非零电压矢量作用时间不做改变,即可调制出正向的零序电流,反之则调制出负向的零序电流,以扇区ⅰ为例,零序电压作用时间可表示为
88、
89、式中,tz为零序电压作用时间,udc为母线电压,u0为零序电压,其由零序电流注入模块通过pi控制器获得,每个逆变器支路开关导通时间可表示为
90、
91、式中,ta1,tb1,tc1为第一套逆变器各支路开关导通时间,ta2,tb2,tc2为第二套逆变器各支路开关导通时间,t0为零电压矢量u0和u7作用时间,t4为非零电压矢量u4作用时间,t6为非零电压矢量u6作用时间,tz为零序电压作用时间。
92、有益效果:
93、本发明采用上述设计方案后,可以具备如下有益效果:
94、1.本发明所述一种直流偏置混合励磁电机最大转矩电流比控制方法,提出了一种双虚拟方波信号注入,能够有效消除虚拟信号注入中因忽略转矩方程高阶导数项带来的控制误差,从而提高控制精度。
95、2.本发明详细推导了考虑电压源逆变器非线性的直流偏置混合励磁电机数学模型,控制系统充分考虑到参考电压和实际电压之间的电压误差,使得最大转矩电流比的控制精度更高,进一步提高电机的运行效率。
96、3.本发明将牛顿拉夫逊法与双方波虚拟信号注入相结合,在不影响控制精度的前提下缩短了最大转矩电流比判据的积分时间,提高了控制系统的动态响应能力。
- 还没有人留言评论。精彩留言会获得点赞!