位置锁存方法、伺服系统及存储介质与流程
本技术涉及电机驱动,尤其是一种位置锁存方法、伺服系统及存储介质。
背景技术:
1、电机驱动装置具备位置锁存功能,通过控制芯片接收到探针信号后直接锁存当前控制周期的位置值。而伺服电机普遍搭载通讯型电机编码器,电机驱动装置和电机编码器通过问答形式进行数据传输,即电机驱动装置发送指令给电机编码器,电机编码器收到指令后锁存当前位置,再将锁存值传送给电机驱动装置。
2、探针功能用于快速捕获伺服轴的位置,经常用于印刷、贴标等伺服应用场合。其中,探针是一个io信号,当plc(programmable logic controller,可编程逻辑控制器)捕获到探针信号的上升或下降沿时,马上把当时的伺服轴当前位置保存下来。然而,使用伺服的高速输入信号,高速输入和普通输入信号,其硬件响应时间是不一样的,普通io的响应时间是ms级,快速i0的响应时间是μs级。尽管时间都很短,但当伺服轴高速运转时,其精度差别是非常大的。并且电机驱动装置和电机编码器之间的可能存在通讯延迟,导致通过探针信号锁存的位置值与通过电机编码器锁存的当前位置存在较大误差,存在电机锁存位置不准确等问题。
技术实现思路
1、本技术实施例提供了一种位置锁存方法、伺服系统及存储介质,能够在外部探针信号触发时,精准地锁存实际的反馈位置。
2、第一方面,本技术实施例提供了一种位置锁存方法,应用于伺服系统的第一处理单元,所述伺服系统还包括第二处理单元和电机编码器;所述第二处理单元用于获取探针信号,并锁存所述探针信号触发时刻的第一时间戳和探针触发标志;
3、所述方法包括:
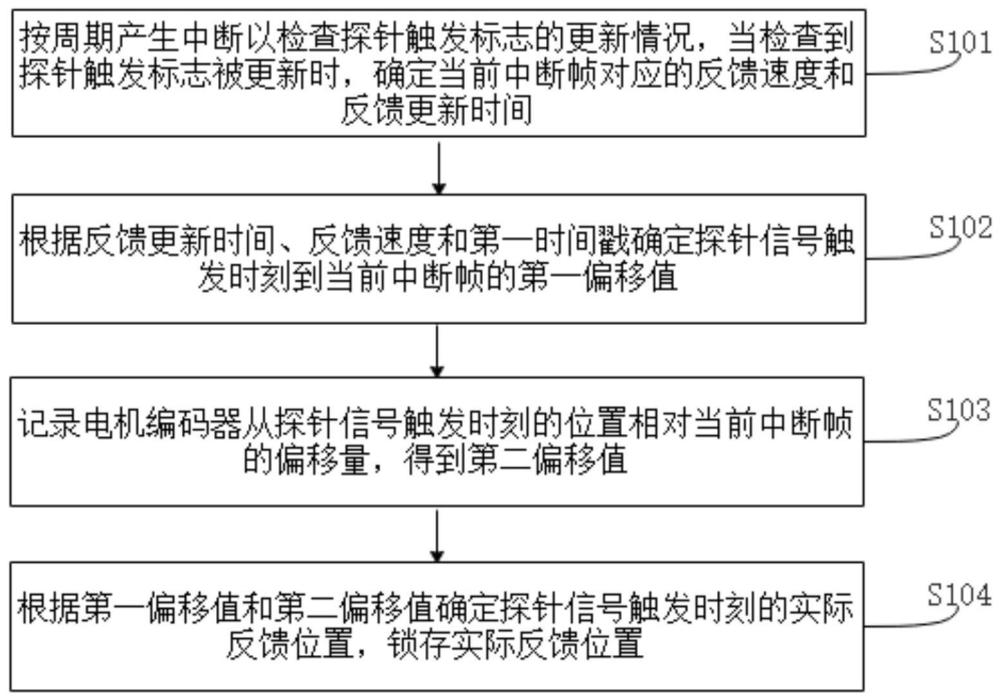
4、按周期产生中断以检查探针触发标志的更新情况,当检查到探针触发标志被更新时,确定当前中断帧对应的反馈速度和反馈更新时间;
5、根据所述反馈更新时间、所述反馈速度和所述第一时间戳确定所述探针信号触发时刻到所述当前中断帧的第一偏移值;
6、记录所述电机编码器从所述探针信号触发时刻的位置相对所述当前中断帧的偏移量,得到第二偏移值;
7、根据所述第一偏移值和所述第二偏移值确定所述探针信号触发时刻的实际反馈位置,锁存所述实际反馈位置。
8、根据本技术第一方面实施例的位置锁存方法,至少有如下有益效果:通过第二处理单元获取探针信号,并锁存探针信号触发时刻的第一时间戳和探针触发标志,以便于后续第一处理单元对探针信号的处理,第一处理单元按周期产生中断以检查探针触发标志的更新情况,实现对探针触发标志的实时检查,当检查到探针触发标志被更新,确定探针信号触发后电机编码器的反馈速度和反馈更新时间,再根据反馈更新时间、反馈速度和第一时间戳确定探针信号触发时刻到当前中断帧的第一偏移值,从而得到电机编码器在探针信号触发时刻位置相对于当前中断帧反馈位置的偏移量,消除时间间隔带来的误差,之后,第一处理单元记录电机编码器从探针信号触发时刻的位置相对当前中断帧的偏移量,从而得到探针信号触发时刻电机编码器计数相对当前中断帧的第二偏移值,最后第一处理单元根据第一偏移值和第二偏移值确定探针信号触发时刻的实际反馈位置,并锁存实际反馈位置,从而实现任意时刻探针信号稳定触发,并且能够准确锁存电机编码器的反馈位置。在本实施例中,通过设置第一处理单元和第二处理单元实现探针信号捕获与电机反馈位置处理逻辑的分离,保证伺服系统的稳定性,并且通过时间戳以及反馈速度来估算时间间隔中电机编码器位置的变化,进而消除时间间隔带来的误差,避免通讯延迟的影响,保证电机编码器位置估算的准确性,从而能够提升探针信号锁存反馈位置的稳定性和准确性。
9、本技术的一些实施例中,所述第一处理单元包括第一定时器,所述第一定时器用于按照第一频率进行第一中断;所述确定当前中断帧对应的反馈速度和反馈更新时间,包括:
10、在所述第一中断时读取所述电机编码器在所述当前中断帧的上一帧的历史位置,在读取完成后,向所述电机编码器发送位置请求命令,得到当前位置,并获取所述当前中断帧开始的反馈更新时间;
11、根据发送所述位置请求命令的间隔确定中断间隔,并根据所述中断间隔、所述历史位置和所述当前位置确定反馈速度。
12、本技术的一些实施例中,所述第一处理单元包括第二定时器,所述第二定时器用于按照第二频率进行第二中断,所述第一频率大于所述第二频率;所述记录所述电机编码器从所述探针信号触发时刻到所述当前中断帧的线圈变化值,得到第二偏移值,包括:
13、在所述第一中断时根据所述当前位置确定所述电机编码器的第一线圈值;
14、在所述第二中断时获取所述电机编码器在所述当前中断帧的第二线圈值;
15、根据所述第一线圈值和所述第二线圈值确定第二偏移值。
16、本技术的一些实施例中,所述根据所述第一偏移值和所述第二偏移值确定所述探针信号触发时刻的实际反馈位置,包括:
17、在所述第二中断时根据所述第一线圈值更新所述电机编码器的位置,得到第一反馈位置;
18、根据所述第一反馈位置和所述第二偏移值确定第二反馈位置,其中,所述第二反馈位置用于表征所述第一处理单元在所述第一中断时所述探针信号触发时刻对应的中断帧的反馈位置;
19、根据所述第二反馈位置和所述第一偏移值确定所述探针信号触发时刻的实际反馈位置。
20、本技术的一些实施例中,所述伺服系统还包括共享内存;在所述第二处理单元获取探针信号之后,所述方法还包括:
21、按照预设周期检查所述共享内存中的探针触发标志。
22、本技术的一些实施例中,所述根据所述反馈更新时间、所述反馈速度和所述第一时间戳确定所述探针信号触发时刻到所述当前中断帧的第一偏移值,包括:
23、根据所述第一时间戳和所述反馈更新时间确定时间偏移值;
24、根据所述反馈速度和所述时间偏移值确定所述电机编码器在所述探针信号触发时刻相对所述当前中断帧的位置偏移,得到第一偏移值。
25、本技术的一些实施例中,所述在所述第一中断时读取所述电机编码器在所述当前中断帧的上一帧的历史位置,包括:
26、在所述第一中断时确定所述当前中断帧的上一历史帧,并读取所述电机编码器在所述历史帧的历史位置,其中,所述历史位置为所述第一处理单元在所述历史帧处向所述电机编码器发送位置请求命令得到。
27、第二方面,本技术实施例提供了一种位置锁存方法,应用于伺服系统的第二处理单元,所述伺服系统还包括第一处理单元和电机编码器;
28、所述方法包括:
29、获取探针信号,并锁存所述探针信号触发时刻的第一时间戳和探针触发标志。
30、本技术的一些实施例中,所述伺服系统还包括共享内存;所述方法还包括:
31、将所述第一时间戳和所述探针触发标志写入所述共享内存;
32、按照预设周期检查所述共享内存中的探针触发标志。
33、第三方面,本技术实施例还提供了一种伺服系统,包括第一处理单元、第二处理单元、电机编码器和共享内存,所述第一处理单元用于执行如第一方面所述的位置锁存方法,所述第二处理单元用于执行如第二方面所述的位置锁存方法。
34、第四方面,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第一方面和n或第二方面所述的位置锁存方法。
35、本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的目的和其他优点可通过在说明书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!