动子模块、磁驱电机系统以及纠偏方法与流程
本技术涉及磁驱输送,尤其涉及到一种动子模块、磁驱电机系统以及纠偏方法。
背景技术:
1、相关技术中,磁驱电机系统包括动子以及由多个定子拼接而成的定子输送线。定子输送线中的线圈周期性通电,以产生行波磁场,该行波磁场的有两个作用:第一,使得动子无需任何支撑部件而悬浮于定输送线上;第二,行波磁场驱动动子沿着预设的规划路线运动。在动子载物时,定子输送线则可以无摩擦力地驱动动子与其上的物体运动,进而实现对物体的运输。
2、然而,由于动子与定子之间无任何支撑部件,在动子上的负载改变或者定子输送线意外断电而宕机时,动子在自身以及负载的重力作用下,将摔落于定子输送线上,可能导致动子以及定子输送线中的至少一者损坏。
技术实现思路
1、本技术提供一种动子模块、磁驱电机系统以及纠偏方法,旨在防止动子模块跌落至定子输送线上,且可以增加动子模块的载重量,以及减小动子模块与定子输送线之间的摩擦力。
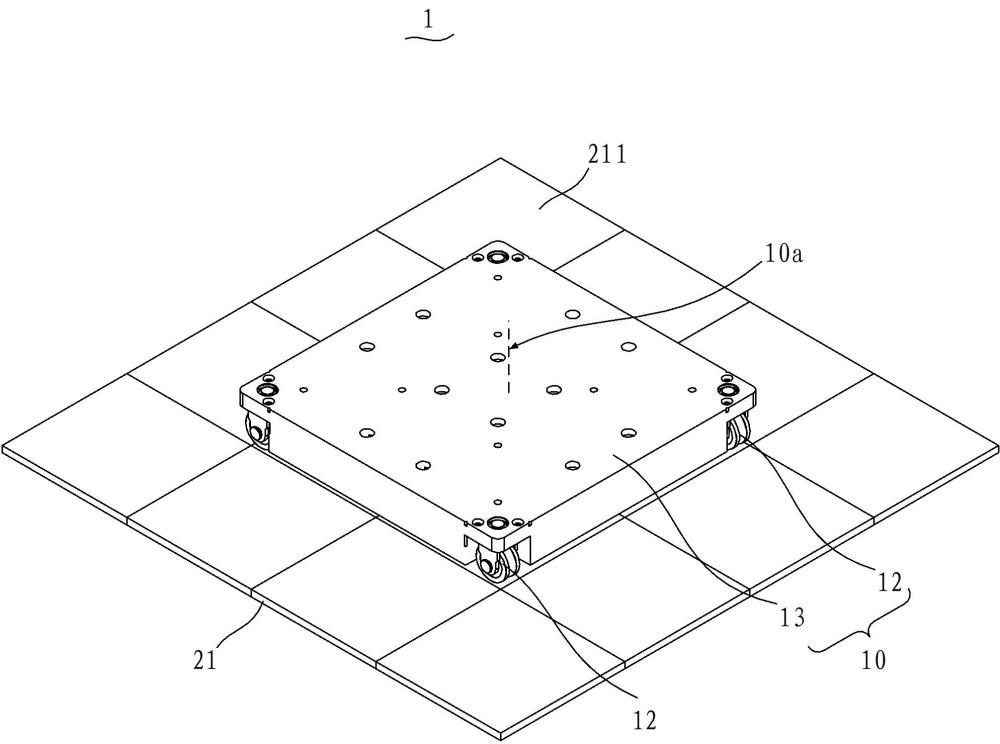
2、本技术实施例第一方面提供一种动子模块,所述动子模块应用于磁驱电机系统中,所述磁驱电机系统包括定子输送线,所述动子模块包括动子基座、永磁组件以及滚动组件,所述永磁组件设置于所述动子基座,所述永磁组件用于与所述定子输送线磁耦合,以被所述定子输送线驱动,滚动组件设置于所述动子基座且与所述永磁组件间隔设置,所述动子模块通过所述滚动组件与所述定子输送线滚动连接。
3、进一步地,所述定子输送线在竖向上对所述动子模块的悬浮力小于所述动子模块的重力,以使得所述滚动组件直接与所述定子输送线滚动接触。
4、进一步地,所述定子输送线能够驱动所述动子模块绕自身的中轴线旋转,其中,所述永磁组件关于所述中轴线呈中心对称设置;和/或,多个所述滚动组件关于所述中轴线呈中心对称设置。
5、进一步地,所述永磁组件与所述滚动组件均设置于所述动子基座的朝向所述定子输送线的表面,所述滚动组件的数量为四个,所述动子基座为矩形板,四个所述滚动组件分别设置于所述矩形板的角位置。
6、进一步地,所述滚动组件包括安装基座以及滚动件,所述安装基座与所述动子基座固定连接,所述滚动件与所述安装基座转动连接。
7、进一步地,所述滚动组件还包括角度反馈件、角度传感器以及换向驱动件,所述角度反馈件与所述滚动件连接并与所述滚动件同步转动,所述角度传感器设置于所述动子基座并与所述角度反馈件对应设置,所述角度传感器用于检测所述滚动件的旋转角度,所述换向驱动件设置于所述动子基座上,所述换向驱动件用于以与所述角度反馈件连接或者不连接的方式调节所述滚动件的前进方向。
8、进一步地,所述角度反馈件包括第一多磁极磁铁,所述第一多磁极磁铁与所述滚动件连接并与所述滚动件同步转动,所述第一多磁极磁铁具有多个南极以及多个北极,多个所述南极以及多个所述北极沿所述第一多磁极磁铁的周向间隔设置;所述角度传感器包括磁传感器,所述磁传感器用于检测所述第一多磁极磁铁转动过程中的磁场变化量,以获取所述滚动件的旋转角度;所述换向驱动件包括驱动线圈,所述驱动线圈围设于所述第一多磁极磁铁周侧,所述驱动线圈用于以磁驱动的方式驱动所述第一多磁极磁铁带动所述滚动件转动,以调节所述滚动件的前进方向。
9、进一步地,所述第一多磁极磁铁呈环形或者圆饼状,多个所述南极以及多个所述北极关于所述第一多磁极磁铁的中轴线呈中心对称设置。
10、进一步地,所述驱动线圈呈环形,所述驱动线圈的中轴线与所述第一多磁极磁铁的中轴线重合,或者,所述驱动线圈包括多个扇形线圈,多个所述扇形线圈关于所述第一多磁极磁铁的中轴线呈中心对称设置,且多个所述扇形线圈的内弧线共圆设置,多个所述扇形线圈的外弧线共圆设置。
11、进一步地,所述换向驱动件还包括第二多磁极磁铁,所述驱动线圈绕设于所述第二多磁极磁铁上。
12、进一步地,所述动子模块还包括集成电路板,所述磁传感器集成于所述集成电路板上,且所述集成电路板与所述驱动线圈连接。
13、进一步地,所述角度反馈件包括反射带,所述反射带与所述滚动件连接并与所述滚动件同步转动,所述角度传感器包括颜色传感器以及光电传感器中的至少一种。
14、进一步地,所述换向驱动件包括电机以及传动结构,所述电机设置于所述动子基座上,所述传动结构与所述电机的输出轴以及所述滚动件传动连接,所述传动结构包括皮带传动结构、蜗杆传动结构以及齿轮传动结构中的至少一种,其中,所述电机驱动所述传动结构带动所述滚动件转动,以调节所述滚动件的前进方向。
15、进一步地,所述安装基座具有间隔设置的第一容纳腔以及第二容纳腔,所述第一容纳腔用于容纳所述滚动件的部分,所述第二容纳腔用于容纳所述角度传感器。
16、进一步地,所述滚动件包括滚动式万向轮、滚珠式万向轮以及麦克纳姆轮中的至少一种。
17、进一步地,所述永磁组件包括沿第一方向排布的第一永磁阵列以及沿第二方向排布的第二永磁阵列,所述第一方向与所述第二方向呈夹角设置。
18、进一步地,所述第一永磁阵列包括沿所述第一方向排布的多个第一永磁体,所述第一永磁体沿所述第一方向的极性排列周期为ns周期、nhs周期、nhsh周期中的至少一种,和/或,所述第二永磁阵列包括沿所述第二方向排布的多个第二永磁体,所述第二永磁体沿所述第二方向的极性排列周期为ns周期、nhs周期、nhsh周期中的至少一种,其中,n代表北极,s代表南极,h代表海尔贝克阵列。
19、进一步地,所述第一永磁阵列具有与所述第一方向平行的第一中心面,所述第二永磁阵列具有与所述第二方向平行的第二中心面,所述第一中心面与所述第二中心面垂直。
20、进一步地,所述第一永磁阵列的数量为一个,所述第二永磁体阵列的数量为两个,两个所述第二永磁阵列分别位于所述第一永磁阵列沿所述第二方向相背的两侧,且两个所述第二永磁阵列各自的所述第二中心面共面设置。
21、本技术实施例的第二方面提供一种磁驱电机系统,所述磁驱电机系统包括上述任一项所述的动子模块以及定子输送线,所述永磁组包括沿第一方向排布的第一永磁阵列以及沿第二方向排布的第二永磁阵列,所述第一方向与所述第二方向呈夹角设置,所述定子输送线包括多个相互拼接的定子模块,所述定子模块具有定子接触面,每一所述定子模块均包括定子绕组,多个所述定子模块包括线性定子模块以及接驳定子模块,所述接驳定子模块的定子绕组包括沿所述第一方向延伸的第一绕组以及沿所述第二方向延伸的第二绕组,所述第一绕组与所述第一永磁阵列磁耦合以驱动所述动子模块沿所述第一方向运动,所述第二绕组与所述第二永磁阵列磁耦合以驱动所述动子模块沿所述第二方向运动,所述线性定子模块的定子绕组包括线性绕组,其中,所述动子模块通过所述滚动组件与所述定子接触面滚动连接。
22、进一步地,所述第一永磁体包括主级磁体以及设置于所述主级磁体沿所述第一方向相背的两侧的次级磁体,所述主级磁体具有第一磁距t1,所述次级磁体具有第二磁距t2,所述第一磁距t1大于所述第二磁距t2,所述第一磁距t1为所述主级磁体沿所述第一方向的宽度,所述第二磁距t2为所述次级磁体沿所述第一方向的宽度。
23、进一步地,所述第一绕组包括多个第一绕组单元,每一所述第一绕组单元包括三相线圈,所述三相线圈分别为u相线圈、v相线圈以及w相线圈,所述三相线圈中的每项线圈具有第一极距p,其中,所述第一磁距t1与所述第一极距p满足:3t1=2p,和/或,位于所述主级磁体的一侧的所述次级磁体的数量为一个,且所述第二磁距t2与所述第一极距p满足:t2=1/6p,和/或,位于所述主级磁体的一侧的所述次级磁体的数量为二个,且位于外侧的所述次级磁体的第二磁距为t21,所述第二磁距t21与所述第一极距p满足:t21=1/6p,位于内侧的所述次级磁体的第二磁距为t22,所述第二磁距t22与所述第一极距p满足:t22=1/3p。
24、进一步地,所述第一永磁阵列与所述第二永磁阵列在所述动子基座上排布呈十字形结构,所述动子模块还包位置传感器,所述位置传感器设置于所述十字形结构所构成的角区域内,所述定子输送线还包括传感器读头,所述传感器读头用于与所述位置传感器配合以读取所述动子模块在所述定子输送线上的位置。
25、进一步地,所述定子模块还包括导向件,所述导向件设置于所述定子接触面上,所述导向件与所述滚动组件滚动连接且能够对滚动件的滚动方向进行限位。
26、本技术实施例第三方面提供第一种磁驱电机系统的纠偏方法,所述纠偏方法应用于上述任一项所述磁驱电机系统,所述纠偏方法包括以下步骤:在所述定子输送线驱动所述动子模块运动的过程中,获取所述动子模块在直角坐标系统中的当前绝对位置,其中,所述动子模块在直角坐标系统中的直角坐标为其绝对位置;获取所述动子模块的所述当前绝对位置在预设的规划路线中所对应的细分段的斜率;获取所述动子模块在所述当前绝对位置的转动角度在极坐标系中对应的极角;比较所述极角与所述斜率是否对应;若对应,则重新执行获取所述动子模块在所述直角坐标系统中的所述当前绝对位置的步骤;若不对应,表明所述动子模块的转动角度偏离所述规划路线,控制所述滚动组件调整转动角度,以使所述动子模块重回所述规划路线。
27、进一步地,获取所述动子模块的所述当前绝对位置在预设的规划路线中所对应的细分段的斜率的步骤包括:直接获取所述当前绝对位置所对应的细分段的斜率,其中,每个所述细分段以及对应的斜率被预先存储,或者,在确定所述当前绝对位置所对应的细分段后,实时计算所述动子模块当前对应的细分段的斜率。
28、进一步地,控制所述滚动组件调整转动角度,以使所述动子模块重回所述规划路线的步骤之后还包括:比较所述当前绝对位置与所述规划路线中的预设目标位置是否一致,以验证所述动子模块是否偏离所述规划路线。
29、进一步地,比较所述极角与所述斜率是否对应的步骤包括:将极坐标系中的所述极角转化为所述直角坐标系统中斜率,以比较所述极角在所述直角坐标系统中的斜率是否与所述细分段的斜率一致,或者,将所述直角坐标系统中的所述斜率转换为极坐标系中所述极角,以比较所述斜率在所述极坐标系中所对应的所述极角是否与所述转动角度所对应的极角一致。
30、进一步地,控制所述滚动组件调整转动角度,以使所述动子模块重回所述规划路线的步骤包括:获取所述当前绝对位置与所述规划路线中的预设目标位置的位置差,根据所述位置差调整所述滚动组件的转动角度;控制与所述当前绝对位置对应的所述定子绕组周期性通电,以驱动所述动子模块按照调整后的所述转动角度运动;重新获取当前绝对位置,并重新执行获取所述当前绝对位置与所述规划路线中的预设目标位置的位置差,直至所述位置差处于预设范围内。
31、进一步地,控制所述滚动组件调整转动角度,以使所述动子模块重回所述规划路线的步骤之后还包括:控制所述极角与所述斜率在预设时长内保持对应;在所述预设时长后,停止控制所述滚动组件以使其进入从动状态。
32、进一步地,所述纠偏方法还包括:控制相邻所述滚动组件之间的前进方向垂直,以使所述动子模块自转,或者,控制所有所述滚动组件之间的前进方向与所述定子绕组的驱动力方向垂直,以使所述动子模块停止。
33、本技术实施例提供一种磁驱电机系统,可以具有以下三种有益效果:
34、第一,可以防止动子模块跌落至定子输送线上。由于定子模块与动子模块滚动连接,定子模块可以对动子模块进行支撑,所以可以防止动子模块跌落至定子输送线上,以避免动子模块与定子输送线的定子模块发生碰撞,进而避免动子模块以及定子模块损坏。
35、第二、可以增加动子模块的载重量。当动子模块通过滚动组件与定子输送线滚动连接时,由于滚动组件设于动子基座上,所以定子输送线可以对动子基座起到一定的支撑作用,相比于动子模块完全悬浮于定子模块上的方案,在定子模块在竖向上用于动子模块的悬浮力不变的情况下,定子模块在竖向上的悬浮力可以更多的用于支撑动子模块及其上的物体,因此,动子模块在竖向上的载重量增大。
36、第三、可以减小动子模块与定子输送线之间的摩擦力。由于动子模块通过滚动组件与定子输送线滚动连接,相互滑动连接的方式,通过滚动的方式连接动子模块以及定子输送线,可以使得动子模块与定子模块之间的摩擦力减小。
- 还没有人留言评论。精彩留言会获得点赞!