一种消除中点电流的三相四桥臂三电平逆变器调制方法
本发明属于电力电子变换与控制领域,更具体地,涉及一种消除中点电流的三相四桥臂三电平逆变器调制方法。
背景技术:
1、为了克服无法兼容不平衡/非线性交流负载的不足,三相三线(3p3w)逆变器可以通过接入中线,构成三相四线(3p4w)逆变器。3p4w逆变器主要分为三相三桥臂四线(3p3l4w)逆变器与三相四桥臂四线(3p4l4w)逆变器。相比于3p3l4w逆变器,3p4l4w逆变器的中线电流流过的是第四桥臂而非直流侧分裂式电容,这极大减小了3p4l4w逆变器母线电容的体积,使其在功率密度上更具优势。
2、对于三电平逆变器,中点电压平衡是其安全稳定工作的前提。由于母线电容容值不均、功率器件开关动作不一致、寄生参数等因素的影响,中点电压将无法避免地偏离额定值,如果不及时治理,中点电压可能会进一步发散,甚至导致整个系统崩溃停机。因此,中点电压平衡控制对于三相四桥臂三电平逆变器的安全稳定运行至关重要。
3、3p4l4w逆变器的基本调制方法主要有三维空间矢量调制(3d-svm)、基于载波的脉冲宽度调制(cb-pwm)两种。与传统空间矢量调制类似,3d-svm也是通过调节正负冗余小矢量的作用时间来实现中点电压平衡控制的,立体分布的空间矢量使得3d-svm的实现过程非常复杂;同时,由于矢量数目众多,在选择合适的作用矢量方面也尤为困难。相比3d-svm,cb-pwm直观简单、易于实现,可通过均压环直接对三相调制波中的共模成分进行控制,以平衡上下分裂式电容电压。这种基本中点均压控制虽然简单,但当逆变器在不同工况下运行时需要手动修改均压控制的增益符号,以确保任意时刻母线电容电压的平衡;同时,当逆变器在零功率因数工况下运行时,由于控制延时与寄生参数的影响,相电压与相电流之间必然会存在微小的相位扰动,这就使得系统实际的输出功率因素在零附近波动。然而,因为扰动是未知且无法观测的,因此系统就无法根据输出功率因素正确地修改均压增益符号,导致均压控制存在失效风险,如果扰动一旦使均压环形成正反馈逻辑,分裂式电容电压就会在短时间内迅速发散,从而导致系统崩溃。
4、尽管第四桥臂旁路了中线电流,但当逆变器在高不平衡度、低功率因素工况下运行时直流侧分裂式电容的电压脉动仍然非常大,需要一个容值很大的电容进行抑制,该电容一般采用电解电容。电解电容的寿命为5千小时左右,当受到诸如环境温度、电流纹波以及工作频率等因素的影响时,其使用寿命会进一步缩短,因此电解电容成为了影响三相四桥臂三电平逆变器可靠性与寿命的主要因素;同时,体积较大的电解电容也制约了逆变器功率密度的进一步提高,不利于系统的轻量化小型化发展。
5、因此,针对三相四桥臂三电平逆变器,如何在载波调制的基础上,克服传统均压控制在零功率因素工况下失效的缺陷,以实现中点电压在全功率因数范围内的平衡;并进一步减小直流侧分裂式电容电压的脉动,以提高系统的可靠性与功率密度,具有重要研究意义。
技术实现思路
1、针对现有技术的缺陷和改进需求,本发明提供了一种消除中点电流的三相四桥臂三电平逆变器调制方法,其目的在于实现三相四桥臂逆变器在全功率因数下的安全稳定运行,并进一步减小直流侧分裂式电容电压的脉动,以提高系统的可靠性与功率密度。
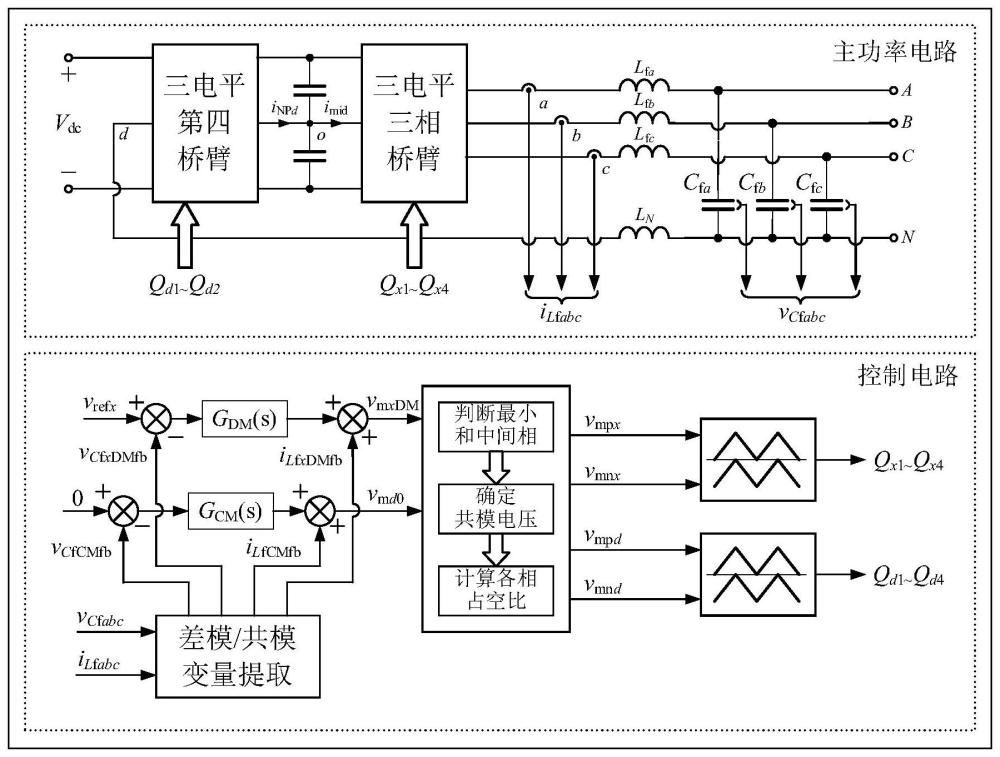
2、为实现上述目的,按照本发明的一个方面,提供了一种消除中点电流的三相四桥臂三电平逆变器调制方法,逆变器包括三电平三相桥臂、三电平第四桥臂、lc交流滤波器和中线电感,三电平三相桥臂输出端连接lc交流滤波器,并通过中线电感从交流滤波电容中性点连接三电平第四桥臂输出端,方法包括:根据各相交流滤波电容电压vcfx和各相交流滤波电感电流ilfx,计算三相桥臂调制波的差模分量vmxdm和共模电压补偿前的第四桥臂调制波vmd0;根据vmxdm计算各相修正前的0电平占空比dzx0,根据dzx0中最大值所对应的相,计算三相桥臂调制波的共模分量vmcm;将vmxdm和vmcm相加得到三相桥臂调制波vmx,利用vmcm对vmd0进行共模电压的开环补偿得到第四桥臂调制波vmd;根据vmx和vmd计算每个桥臂实际+1、-1、0电平的占空比;对于各桥臂:利用该桥臂实际+1、-1、0电平的占空比计算该桥臂与上下层叠载波实时交截的正、负调制波,该正、负调制波与对应的载波交截,产生驱动信号以驱动该桥臂。
3、更进一步地,dzx0为:
4、dzx0=1-|vmxdm|
5、其中,x为a、b、c三相中的相。
6、更进一步地,当dzx0中最大值所对应的相为a相时,vmcm为:
7、vmcm=-(vmbdm+vmcdm)/2
8、其中,vmbdm为b相桥臂调制波的差模分量,vmcdm为c相桥臂调制波的差模分量。
9、更进一步地,当dzx0中最大值所对应的相为b相时,vmcm为:
10、vmcm=-(vmadm+vmcdm)/2
11、其中,vmadm为a相桥臂调制波的差模分量,vmcdm为c相桥臂调制波的差模分量。
12、更进一步地,当dzx0中最大值所对应的相为c相时,vmcm为:
13、vmcm=-(vmadm+vmbdm)/2
14、其中,vmadm为a相桥臂调制波的差模分量,vmbdm为b相桥臂调制波的差模分量。
15、更进一步地,三电平三相桥臂中,各相桥臂实际+1、-1、0电平的占空比为:
16、dzx=min{1+vma,1+vmb,1+vmc,1-vma,1-vmb,1-vmc}
17、dpx=(1-dzx+vmx)/2
18、dnx=(1-dzx-vmx)/2
19、其中,dpx、dnx、dzx分别为当前开关周期x相实际+1、-1、0电平的占空比;vma、vmb、vmc分别为a、b、c相桥臂调制波,x为a、b、c三相中的相。
20、更进一步地,各相桥臂与上下层叠载波实时交截的正、负调制波为:
21、vmxp=dpx
22、vmxn=-dnx
23、其中,vmxp为x相桥臂与上下层叠载波实时交截的正调制波,vmxn为x相桥臂与上下层叠载波实时交截的负调制波。
24、更进一步地,三电平第四桥臂实际+1、-1、0电平的占空比为:
25、dzd=min{1+vma,1+vmb,1+vmc,1-vma,1-vmb,1-vmc}
26、dpd=(1-dzd+vmd)/2
27、dnd=(1-dzd-vmd)/2
28、其中,dzd、dpd、dnd分别为当前开关周期三电平第四桥臂实际+1、-1、0电平的占空比。
29、更进一步地,三电平第四桥臂与上下层叠载波实时交截的正、负调制波为:
30、vmdp=dpd
31、vmdn=-dnd
32、其中,vmdp为三电平第四桥臂与上下层叠载波实时交截的正调制波,vmdn为三电平第四桥臂与上下层叠载波实时交截的负调制波。
33、按照本发明的一个方面,提供了一种控制器,用于执行如上所述的消除中点电流的三相四桥臂三电平逆变器调制方法。
34、总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
35、(1)提供了一种消除中点电流的三相四桥臂三电平逆变器调制方法,针对包括三电平三相桥臂、三电平第四桥臂的逆变器,通过在三电平桥臂正/负半周期的每个开关周期内分别加入-1电平与+1电平,构造了独立可调的0电平占空比,有效实现了中点电流与负荷电压的解耦控制,且该方法基于载波调制,具有控制简单、易于实现的特点;
36、(2)通过管理三相的0电平占空比,以实现零中点电流控制,从根源上解决了传统均压控制在零功率因数工况下失效问题,使中点电压在全功率因数范围内始终平衡,充分提高了系统的可靠性;
37、(3)提供了一种三相四桥臂三电平逆变器的中点电压低频脉动抑制方法,通过管理三相的0电平占空比实现零中点电流控制,以消除中点电流的低频纹波成分,从而完全抑制中点电压的低频脉动,极大减小了直流侧分离式电容的容值,进而提高了整个系统的功率密度。
- 还没有人留言评论。精彩留言会获得点赞!