一种基于无功自适应分配的风机构网控制系统
本技术属于新能源并网,更具体地,涉及一种基于无功自适应分配的风机构网控制系统。
背景技术:
1、基于二极管整流器(dr)的高压直流(hvdc)系统具有轻量化和经济效益高等优势,为大规模海上风电并网提供了可行方案。然而,由于dr非受控特性,dr-hvdc系统不具备交流汇集网络的构网能力。为解决这一问题,可通过附加有源设备如辅助模块化多电平换流器(mmc),但这会降低dr-hvdc系统的经济效益。而风机网侧换流器具备灵活控制能力,能够承担构建交流汇集网络电压的任务。对于dr-hvdc系统,风机的构网控制包括集中式构网控制、分布式锁相环(pll)型构网控制、无功自同步型构网控制等。
2、集中式构网控制通过有功和无功功率控制回路实现电压和频率调节,但这种方法依赖于风机间快速通信以实现在公共耦合点(pcc)处的交流电压控制。为减少对通信链路的依赖,有研究提出分布式pll型gfm(电网构建)控制以实现风机的平稳同步启动,并基于 q-f下垂控制器,根据风机的额定容量均等分配交流汇集网络的无功功率。考虑到附加pll存在恶化系统稳定性的影响,有文献提出了基于 q-f下垂控制器的无功自同步型gfm控制,其无功功率分配机制与分布式pll型gfm控制相同。
3、然而,由于海上各风场的区域差异性,风机间的有功出力呈现出不均衡的特征。在上述常规控制的无功功率分配机制下,不同出力风机均等分配无功功率,易使得低出力风机换流容量利用不充分,同时高出力风机面临因承担较多无功而引发的过载风险。此外,考虑到交流滤波器组(afb)在提供dr无功功率补偿过程中可能存在误操作等极端工况,会导致海上交流汇集网络的无功功率盈余或缺额增大,这将直接增加每台风机所需承担的无功功率,进一步加剧高出力风机过载风险。
技术实现思路
1、针对现有技术的缺陷,本技术的目的在于根据风机的实际有功功率输出合理分配无功功率,适应不同工况下风机间的出力差异,提高低出力风机的换流容量的利用率,同时避免高出力风机因过载而受损。
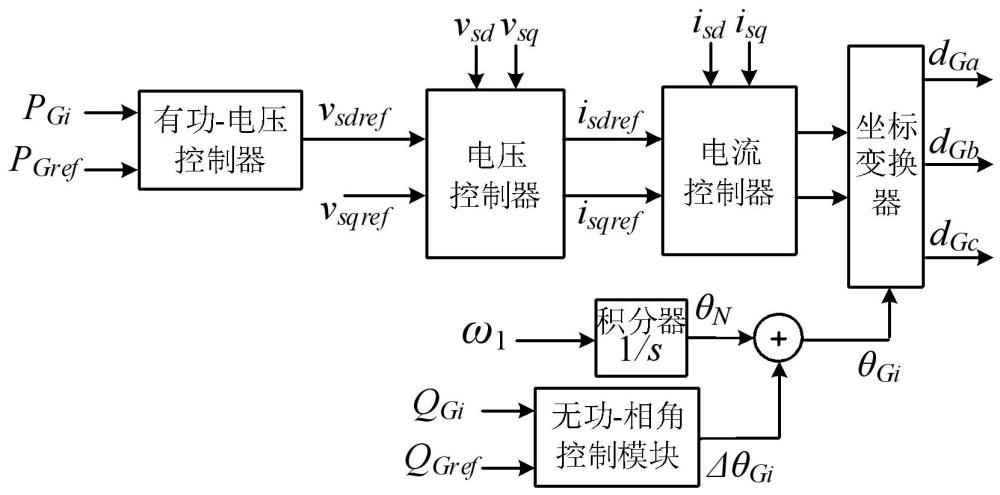
2、为实现上述目的,本技术提供一种基于无功自适应分配的风机构网控制系统,包括:无功-相角控制模块、积分器和加法器;
3、无功-相角控制模块用于基于风机输出的无功功率 qgi和无功功率的参考值 qgref,进行作差并将差值与下垂系数 kqp相乘,将相乘得到的结果作为相角偏差信号 δθgi,下垂系数 kqp为正数;
4、积分器用于基于风机额定角频率,通过积分获取统一相角 θn;
5、加法器用于基于相角偏差信号 δθgi和统一相角 θn,通过求和获取风机端口交流电压的参考相位 θgi,风机端口交流电压的参考相位 θgi用于指示 dq坐标系与三相坐标系之间的角度关系。
6、在一种可能的实现方式中,无功-相角控制模块包括:无功-相角下垂控制器、无功-相角pi控制器和使能控制器;
7、使能控制器用于比较风机的视在功率 sgi和视在功率阈值之间的大小,在视在功率 sgi小于或等于视在功率阈值的情况下,控制无功-相角下垂控制器处于工作状态,并控制无功-相角pi控制器处于停止状态,在视在功率 sgi大于视在功率阈值的情况下,控制无功-相角下垂控制器处于停止状态,并控制无功-相角pi控制器处于工作状态;
8、无功-相角下垂控制器用于在工作状态下,按照以下无功-相角下垂控制模式的方程确定相角偏差信号 δθgi:;
9、无功-相角pi控制器用于在工作状态下,按照以下无功-相角pi控制模式的方程确定相角偏差信号 δθgi:;
10、其中, qlimit表示无功功率输出的限定值, kqi表示比例积分pi控制器的积分系数, s表示微分算子。
11、在一种可能的实现方式中,无功-相角下垂控制模式附加有一阶惯性算子,附加一阶惯性算子后的方程为:
12、;
13、其中,表示一阶惯性算子, s表示微分算子, kt表示一阶惯性时间常数。
14、在一种可能的实现方式中,无功-相角pi控制器还用于:在使能信号 en被激活前的一个目标控制时刻,确定目标控制时刻下的无功功率 qgi跟随限定值 qlimit;
15、在使能信号 en被激活前的一个目标控制时刻下的无功功率 qgi大于等于0时,则设置目标控制时刻下 qlimit为大于0的第一限定值;
16、或,在使能信号 en被激活前的一个目标控制时刻下的无功功率 qgi小于0时,则设置目标控制时刻下 qlimit为小于0的第二限定值。
17、在一种可能的实现方式中,无功-相角pi控制器还用于:
18、基于风机的换流器容量裕度,确定风机能够承担的无功功率范围;
19、基于风机能够承担的无功功率范围,确定第一限定值和第二限定值。
20、在一种可能的实现方式中,使能控制器包括:比较器和持续检测器;
21、比较器用于比较视在功率 sgi和视在功率阈值之间的大小,在视在功率 sgi小于或等于视在功率阈值的情况下,输出第一控制信号至持续检测器,在视在功率 sgi大于视在功率阈值的情况下,输出第二控制信号至持续检测器,第一控制信号的电平和第二控制信号的电平不相同;
22、持续检测器用于在接收到第二控制信号的持续时长大于或等于持续检测时间阈值 td的情况下,控制无功-相角下垂控制器处于停止状态,并控制无功-相角pi控制器处于工作状态;否则,在接收到第一控制信号或第二控制信号的持续时长小于持续检测时间阈值 td的情况下,控制无功-相角下垂控制器处于工作状态,并控制无功-相角pi控制器处于停止状态。
23、在一种可能的实现方式中,比较器还用于:
24、在无功-相角下垂控制器处于工作状态的情况下,设定视在功率阈值为阈值上限值 sgup,或在无功-相角pi控制器处于工作状态的情况下,设定视在功率阈值为阈值下限值 sglow, sgup> sglow。
25、在一种可能的实现方式中,还包括:坐标变换器;
26、坐标变换器用于基于风机端口交流电压的参考相位 θgi、 d轴调制信号和 q轴调制信号,执行 dq坐标系到 abc坐标系变换,获取 abc三相控制信号。
27、在一种可能的实现方式中,还包括:有功-电压控制器、电压控制器和电流控制器;
28、有功-电压控制器用于基于风机有功功率 pgi和捕获的最大风电功率点 pgref,通过控制风机有功功率 pgi跟踪所捕获的最大风电功率点 pgref,确定风机端口交流电压 vs的 d轴参考电压 vsdref;
29、电压控制器用于基于 d轴参考电压 vsdref、 q轴参考电压 vsqref、风机端口交流电压 vs的 d轴电压 vsd和风机端口交流电压 vs的 q轴电压 vsq,通过以 dq轴参考电压作为参考来控制风机端口交流电压 vs稳定的控制方式,确定风机端口交流电流 is的 d轴参考电流 isdref和 q轴参考电流 isqref;
30、电流控制器用于基于风机端口交流电流 is的 d轴参考电流 isdref和 q轴参考电流 isqref以及风机端口交流电流 is的 d轴电流 isd和 q轴电流 isq,通过以 dq轴参考电压作为参考来控制 is的幅度的控制方式,确定 d轴调制信号和 q轴调制信号。
31、在一种可能的实现方式中,下垂系数 kqp的取值范围为0.25~5。
32、总体而言,通过本技术所构思的以上技术方案与现有技术相比,具有以下有益效果:
33、(1)本技术提供的一种根据风机的实际有功功率输出合理分配无功功率的分配机制,低出力风机多分配无功功率,而高出力风机自适应地少承担无功功率。基于该分配机制,有效提高了低出力风机的换流容量利用率,同时避免高出力风机因承担过多无功功率而过载的风险(降低了常规控制方法中无功功率均等分配机制带来的高出力风机因承担过多无功功率而过载的风险),甚至高出力风机仍留有一定的容量裕度,可满足为陆上电网提供频率(有功)支撑的需求,提升不同出力风机的容量可调控性。
34、(2)本技术提供的基于 q-θ的无功自适应分配的风机构网控制系统,可基于上述分配机制自主合理地分配风机间的无功功率,且无需依赖风机间的通讯和增加风机的额定容量。通过配置使能控制器完成无功-相角控制模块的模式切换,可有效防止常规控制方法中无功功率均等分配机制带来的高出力风机因承担过多无功功率而过载的现象,保证风机间的输出功率均在安全阈值范围内。
35、(3)通过设计使能控制器的视在功率阈值上下限值和持续检测器,有效避免风机因瞬时功率波动而频繁投切无功-相角控制模块的控制模式,防止使能控制器在系统瞬时功率冲击等干扰下发生误动作,增强所发明控制抗干扰能力。
36、(4)本技术提供的构网控制系统适用性强,具备保障电网系统安全经济运行的能力,可推广至陆上风电经dr-hvdc送出系统、陆上风电经级联型dr-mmc hvdc送出系统的应用场景及光伏等其他类型新能源多机协调构网场景。
- 还没有人留言评论。精彩留言会获得点赞!