摆线减速电机的制作方法
本技术属于电机装置,涉及一种减速电机,尤其涉及一种摆线减速电机。
背景技术:
1、随着人工智能技术的发展以及人形机器人控制算法的突破,加速了人形机器人的商业化。但是由于机器人的关节减速电机性能不足,制约了机器人了动态性能进一步提升。
2、目前机器人用的关节驱动电机大多采用通用的工业伺服电机和减速器进行设计,不利于关节机构的轻量化、结构紧凑、体积小巧。行星减速电机通过多级减速串联实现高减速比,提高减速电机的扭矩,但是多级减速导致重量和体积增大,背隙累积导致传动精度降低。谐波减速电机可以实现较高的精度,但是谐波减速结构的刚性较差,不耐冲击,寿命较低。传统的摆线电机具有较高的传动比,但是电机和减速结构缺乏结构优化,导致体积和重量较大,无法应用在机器人人领域。
3、有鉴于此,如今迫切需要设计一种具有高精度、高刚性、小体积的新型摆线减速电机,以便克服现有摆线减速电机存在的上述至少部分缺陷。
技术实现思路
1、本实用新型提供一种摆线减速电机,可提高装置的强度及刚度,提高减速比,可更有效地利用空间。
2、为解决上述技术问题,根据本实用新型的一个方面,采用如下技术方案:
3、一种摆线减速电机,所述摆线减速电机包括:壳体支架、电机转子组件、电机定子组件及摆线减速器;
4、所述壳体支架设有中空区域,所述中空区域设置所述摆线减速器;所述摆线减速器包括偏心输入轴、摆线轮盘、摆线内齿圈及行星输出支架模组;
5、所述电机定子组件固定设置于所述壳体支架,所述摆线内齿圈固定设置于所述壳体支架的中空区域;所述偏心输入轴固定、偏心设置于所述电机转子组件,所述电机转子组件能在所述电机转子组件与电机定子组件电磁作用下旋转,所述偏心输入轴能跟随所述电机转子组件偏心旋转;
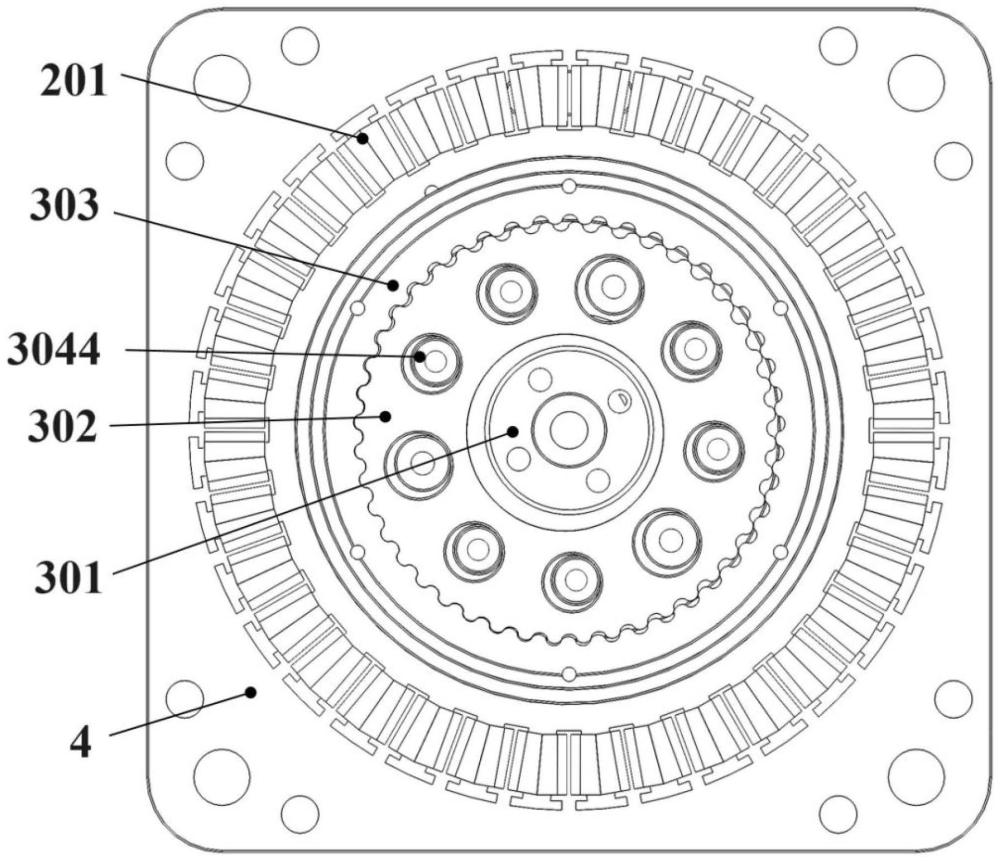
6、所述行星输出支架模组包括第一支架及第二支架,所述摆线轮盘设置于所述第一支架与第二支架之间;所述摆线轮盘位于摆线内齿圈内,摆线轮盘周边设有若干凸起,各凸起在设定状态下能与摆线内齿圈配合;
7、所述摆线轮盘中部设有第一孔,所述偏心输入轴穿过所述第一孔,所述偏心输入轴能在所述第一孔内偏心旋转,从而带动摆线轮盘在所述摆线内齿圈限定的区域内旋转,使摆线轮盘的设定位置与摆线内齿圈的设定区域啮合;
8、所述摆线轮盘在所述第一孔周边设有若干第二孔,所述第一支架及第二支架之间设有若干穿过对应第二孔的第一柱体;所述第一柱体的外径小于所述第二孔的内径,所述摆线轮盘的力矩通过第二孔传递至对应的第一柱体,进而通过第一柱体带动第二支架旋转。
9、作为本实用新型的一种实施方式,所述电机转子组件包括转子支架、若干永磁磁钢、磁轭环及磁编码器磁铁;所述电机定子组件包括电机绕线定子;
10、所述电机绕线定子固定于所述壳体支架;所述摆线减速器位于所述电机绕线定子内;所述磁轭环设置于转子支架,各永磁磁钢设置于磁轭环内壁,磁编码器磁铁设置于转子支架的中部区域。
11、作为本实用新型的一种实施方式,所述摆线减速电机进一步包括第一轴承;所述第一轴承设置于摆线轮盘与偏心输入轴之间。
12、作为本实用新型的一种实施方式,所述偏心输入轴的偏心端套合安装于第一轴承的内壁,所述摆线轮盘的第一孔套合安装第一轴承的外壁。
13、作为本实用新型的一种实施方式,所述偏心输入轴设有第一卡簧挡圈,所述第一卡簧挡圈用来对所述第一轴承进行轴向限位。
14、作为本实用新型的一种实施方式,所述摆线减速电机进一步包括第二轴承或/和第三轴承或/和第四轴承或/和第五轴承;
15、所述第二轴承设置于偏心输入轴与第一支架之间,所述第三轴承设置于偏心输入轴与第二支架之间;
16、所述第四轴承设置于第一支架与壳体支架之间,所述第五轴承设置于第二支架与壳体支架之间。
17、作为本实用新型的一种实施方式,所述偏心输入轴设有第二卡簧挡圈,所述第二卡簧挡圈用来对所述第三轴承进行轴向限位。
18、作为本实用新型的一种实施方式,所述第一支架及第二支架之间设有至少一限位机构,使得第一支架与第二支架之间形成空隙。
19、作为本实用新型的一种实施方式,所述第一支架的中部设有第三孔,所述第二支架的中部设有第四孔;所述偏心输入轴穿过所述第一支架的第三孔及第二支架的第四孔。
20、本实用新型的有益效果在于:本实用新型提出的摆线减速电机,可提高装置的强度及刚度,提高减速比,可更有效地利用空间。
21、本实用新型利用定子中空结构,集成高刚度、高减速比的减速器,空间利用率高,实现了扁平化设计,适合一些空间狭窄的应用场合。
22、本实用新型采用单盘式一齿差的全摆线齿廓实现啮合传动,实现大减速比和大刚度,降低了减速器的质量。此外,电机的转子和减速器输入轴端面实现结构分离,降低转配难度,便于维修。
技术特征:
1.一种摆线减速电机,其特征在于,所述摆线减速电机包括:壳体支架、电机转子组件、电机定子组件及摆线减速器;
2.根据权利要求1所述的摆线减速电机,其特征在于:
3.根据权利要求1所述的摆线减速电机,其特征在于:
4.根据权利要求3所述的摆线减速电机,其特征在于:
5.根据权利要求3所述的摆线减速电机,其特征在于:
6.根据权利要求1所述的摆线减速电机,其特征在于:
7.根据权利要求6所述的摆线减速电机,其特征在于:
8.根据权利要求1所述的摆线减速电机,其特征在于:
9.根据权利要求1所述的摆线减速电机,其特征在于:
技术总结
本技术揭示了一种摆线减速电机,包括壳体支架、电机转子组件、电机定子组件及摆线减速器;壳体支架设有中空区域,中空区域设置摆线减速器;摆线减速器包括偏心输入轴、摆线轮盘、摆线内齿圈及行星输出支架模组;行星输出支架模组包括第一支架及第二支架;摆线轮盘中部设有第一孔,偏心输入轴穿过第一孔,偏心输入轴能在第一孔内偏心旋转,从而带动摆线轮盘旋转;摆线轮盘在第一孔周边设有若干第二孔,第一支架及第二支架之间设有若干穿过对应第二孔的第一柱体;摆线轮盘的力矩通过第二孔传递至对应的第一柱体,进而通过第一柱体带动第二支架旋转。本技术提出的摆线减速电机,可提高装置的强度及刚度,提高减速比,可更有效地利用空间。
技术研发人员:倪华良,肖飞云,刘雨,张洋洋,沈彪,何斌
受保护的技术使用者:上海傲意信息科技有限公司
技术研发日:20240407
技术公布日:2024/11/28
- 还没有人留言评论。精彩留言会获得点赞!