一种适用于单齿飞轮的磁转速传感器的滤波方法与流程
1.本发明涉及滤波技术领域,具体涉及一种适用于单齿飞轮的磁转速传感器的滤波方法。
背景技术:
2.转速传感器是一种能将转角位移转换成电信号的装置,按照工作原理可以分为激光式转速传感器、电容式转速传感器和磁电式转速传感器。其中磁电式转速传感器是利用电磁感应原理,将输入的运动速度转换成线圈中的感应电势输出。它直接将被测物体的机械能量转换成电信号输出,工作不需要外加电源,是一种典型的无源传感器。由于这种传感器有较大的输出功率、非接触测量,抗干扰性能好、配用电路较简单和性能稳定等优势而广泛应用于各种工业控制。
3.在工业控制中,为了获取各种导磁材料如:如齿轮、叶轮、带孔(或槽、螺钉)圆盘的转速及机械物体的位置,通常在被测量物体上做位置标记,例如在转动的飞轮上面添加一颗齿,具体如图8所示。当飞轮转动带动齿经过磁电式转速传感器时,磁电式转速传感器会产生一个脉冲,由于磁场的原因,产生的脉冲宽度比实际齿的宽度大很多,从而造成定位的误差。在某些工业控制中,能够准确定位运动物体的速度和位置非常重要。例如在发动机引擎的控制中,活塞的位置是跟喷油和点火时机相关联。若位置不准确,可能会造成发动机熄火甚至产生爆缸。
技术实现要素:
4.鉴于背景技术的不足,本发明是提供了一种适用于单齿飞轮的磁转速传感器的滤波方法,确保滤波后的信号的高电平宽度占信号周期的宽度比例与单齿的周长占飞轮的周长比例相匹配,减少定位误差。
5.为解决以上技术问题,本发明提供了如下技术方案:一种适用于单齿飞轮的磁转速传感器的滤波方法,包括以下步骤:s1:将磁转速传感器输出的模拟信号转换为数字信号,所述数字信号为脉冲信号,将所述数字信号输入到数字处理模块,所述数字处理模块在所述数字信号的电压幅值大于阈值电压v
th
时输出第一电平信号、在所述数字信号的电压幅值低于所述阈值电压v
th
时输出第二电平信号;s2:所述数字处理模块接收到所述数字信号后,先获取数字信号在当前周期的最大电压值e,然后将最大电压值e与比例系数相乘,最后将阈值电压v
th
更新为e,所述比例系数为所述单齿的边界在所述磁转速传感器的输出信号的电压值和所述单齿经过所述磁转速传感器时的输出信号的最大电压值的比值。
6.在某种实施方式中,所述第一电平信号为高电平信号,所述第二电平信号为低电平信号。
7.在某种实施方式中,步骤s2包括步骤s20,具体如下:
s20:所述数字处理模块在所述数字信号的第一个周期中获取所述数字信号的最大电压值e1,然后将最大电压值e1与比例系数相乘,并将阈值电压v
th
更新为e1。
8.在某种实施方式中,步骤s2还包括步骤s21,具体如下:s21:所述数字处理模块在所述数字信号的第二个周期中寻找所述数字信号的电压向上过零点和最大电压值e2,并计算该电压向上过零点与最大电压值之间的距离d2,然后将最大电压值e2与比例系数相乘,并将阈值电压v
th
更新为e2,所述电压向上过零点是数字信号的电压幅值大于0v的起始点。
9.在某种实施方式中,步骤s2还包括以下步骤:s22:所述数字处理模块在接收到的所述数字信号的第n个周期中,n为整数且大于2,寻找第n个周期中的电压向上过零点,并计算第n
‑
1个周期的周期长度tn
‑
1;s23:所述数字处理模块根据公式求解出,其中为设计单齿周长与飞轮周长之比;s24:所述数字处理模块根据公式更新比例系数,根据公式更新,是数字信号的第n
‑
1个周期中的最大电压值和数字信号的第n
‑
2个周期的最大电压值的比值;s25:所述数字处理模块根据公式更新阈值电压v
th
;s26:所述数字处理模块寻找所述数字信号在第n个周期中的最大电压值en,计算第n个周期中的电压向上过零点和最大电压值en之间的距离dn,然后更新阈值电压。
10.在某种实施方式中,所述数字处理模块寻找当前周期的电压向上过零点的过程如下:数字处理模块对输入的数字信号进行采样,将数字信号的电压大于0v的第一个采样点作为当前周期的电压向上过零点。
11.在某种实施方式中,所述的初始值是1。
12.在某种实施方式中,步骤s2中,所述数字处理模块寻找当前周期的最大电压值e的过程如下:所述数字处理模块对输入的数字信号进行采样,将当前采样的数字信号的电压与上次采样的数字信号的电压进行比较,如果当前采样的数字信号的电压小于上次采样的数字信号的电压,则将上次采样的数字信号的电压作为最当前周期的最大电压值,然后结束寻找当前周期的最大电压值。
13.在某种实施方式中,步骤s1中所述磁转速传感器输出的模拟信号先输入到差分放大器,差分放大器的输出信号再输入到数模转换器,所述数模转换器输出所述数字信号。
14.本发明与现有技术相比所具有的有益效果是:1:本发明的滤波方法中根据单齿的周长与飞轮的周长之比以及数字信号在当前周期的最大电压值来调节数字处理模块中的阈值电压v
th
,对电压幅值小于阈值电压v
th
的数字信号进行滤波,可以确保滤波后的信号的波形于实际单齿接近磁转速传感器的位置匹配,即信号的波形的上升沿对应的就是单齿的边界靠近磁转速传感器的位置,信号的波形
的下降沿对应的就是单齿的边界离开磁转速传感器的位置。尤其是信号的波形的下降沿即单齿离开磁转速传感器的位置,与飞轮的转速快慢无关。
15.2:数字处理模块接收的数字信号在第n个周期中时,会先根据第n
‑
1个周期的最大电压值en
‑
1和第n
‑
2个周期中的最大电压值en
‑
2的比例关系来预测第n个周期的最大电压值en,并根据预测的第n个周期的最大电压值en来调节数字处理模块在第n个周期的阈值电压v
th
,以此确保第n个周期的阈值电压v
th
能够根据第n
‑
1个周期的最大电压值en
‑
1和第n
‑
2个周期中的最大电压值en
‑
2的变化而变化,另外当获取到数字信号在第n个周期的最大电压值en时立即将第n个周期的阈值电压v
th
更新为,进而确保滤波后的信号在第n个周期中的下降沿位置与单齿离开磁转速传感器的位置相匹配。
附图说明
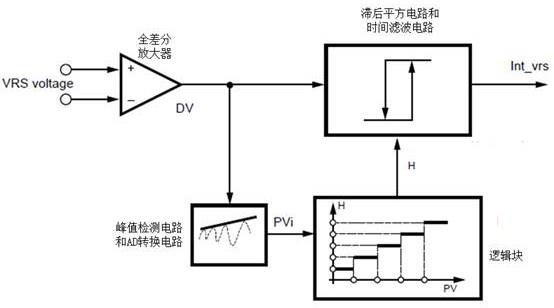
16.图1为现有滤波电路的结构示意图;图2为图1中的自适应滞后电路的结构示意图;图3为图2中的逻辑块的输入和输出关系示意图;图4为图2中自适应滞后电路对磁转速传感器的输出信号的滤波效果示意图;图5为实施本发明用到的滤波电路的结构示意图;图6为单齿经过磁转速传感器时磁转速传感器的输出信号的波形;图7为使用本发明对磁转速传感器的输出信号滤波后的效果示意图;图8为在飞轮上添加单齿的结构示意图。
具体实施方式
17.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
18.如图1所示,图1中的滤波单元包括自适应滞后电路和自适应时间滤波电路,主要在11、23、31、63或者128齿的飞轮经过磁转速传感器时对磁转速传感器的输出信号进行滤波。
19.参照图2,滤波单元的自适应滞后电路包括全差分放大器、峰值检测电路和ad转换电路、逻辑块、滞后平方电路和时间滤波电路,磁转速传感器输出的检测信号即vrs voltage先输入到全差分放大器,全差分放大器的输出信号再分别输入到峰值检测电路和滞后平方电路和时间滤波电路,峰值检测电路的输出信号再输入到ad转换电路,ad转换电路的输出信号即量化峰值电压再输入到逻辑块,逻辑块根据根据量化峰值电压的大小向滞后平方电路和时间滤波电路输入相对应的滞后输出电压,其中逻辑块的输入输出关系参照图2,滞后平方电路和时间滤波电路根据输入的滞后输出电压对全差分放大器的输出信号进行滤波,滤波效果示意图可参照图4。从图4中可以得到,虽然自适应滞后电路根据检测信号的最大电压值进行滤波,但是跟单齿的周长与飞轮的周长之比无关,自适应滞后电路输出的信号仍然与实际信号存在偏差。
20.另外,目前自适应时间滤波电路的滤波时间取决于检测信号在前一个周期的持续时间tn,目前滤波时间大多为1/32*tn,通过滤波时间可以过滤非常短的峰值。然而由于单齿的飞轮在转动一圈时仅产生一个脉冲,磁转速传感器在一个周期中会长时间处于常电平
状态,如果使用滤波时间是1/32t的自适应时间滤波器,会将该脉冲的大部分或者全部滤去,从而无法对单齿飞轮进行定位或者获取飞轮的转速。
21.另外,图1中的结构进行动态调整迟滞依赖的电压的峰值和1/32t滤波器的相关参数均依赖以往周期的,而非当前周期的。
22.现在对飞轮上的单齿经过磁转速传感器的输出特性进行分析:当飞轮上的单齿经过磁转速传感器时,磁转速传感器中磁通量随时间的变化为:;单齿边界经过磁转速传感器时的磁通量固定为:,该磁通量的大小不随转速快慢而改变,仅于系统中设计产生的固定夹角值有关。
23.当单齿经过磁转速传感器时,磁转速传感器产生的电压随时间的变化为:当单齿边界经过磁转速传感器时,磁转速传感器刻产生的电压为:该点电压于最大值电压的比例:因此该比例为固定值,与转速无关,依据该原理设计本发明。
24.本实施例中,为简化滤波步骤,将磁转速传感器的输出电压随时间的变化公式通过坐标平移得到。
25.一种适用于单齿飞轮的磁转速传感器的滤波方法,包括以下步骤:s1:将磁转速传感器输出的模拟信号转换为数字信号,数字信号为脉冲信号,将数字信号输入到数字处理模块,数字处理模块在数字信号的电压幅值大于阈值电压v
th
时输出第一电平信号、在数字信号的电压幅值低于阈值电压v
th
时输出第二电平信号;s2:数字处理模块接收到所述数字信号后,先获取数字信号在当前周期的最大电压值e,然后将最大电压值e与比例系数相乘,最后将阈值电压v
th
更新为e,比例系数为单齿的边界在所述磁转速传感器的输出信号的电压值和单齿经过磁转速传感器时的输出信号的最大电压值的比值。
26.如图5所示,本实施例中,步骤s1中磁转速传感器输出的模拟信号先输入到差分放大器,差分放大器的输出信号再输入到数模转换器,数模转换器输出数字信号。另外图4中的滤波电路的结构的信号处理流程是单向的,在实际工作时,图4中的滤波电路的每个模块只需对输入的信号进行处理然后输出信号即可,没有模块之间的耦合,而图2中的自适应滞后电路的每个模块之间为存在环形结构,该自适应滞后电路中的每个模块在运行时除了要对输入的信号进行处理,还要考虑每个模块之间的耦合,不利于设计。
27.另外,图8中的传感器输出的信号vdiff可能是正向电压,也可能是负向电压,当是正向电压时,图4中的p端电压大于n端电压,当是负向电压时,p端电压小于n端电压。本实施例中以p端电压大于n端电压进行说明。
28.本实施例中,比例系数的初始值为,可以根据单齿和飞轮的设计参数确定。
29.本实施例中,第一电平信号是高电平信号,第二电平信号是低电平信号。需要注意的是,飞轮的位置定位和转速计算是根据输出的滤波信号的高电平在一个周期中占的比例来计算的,在某种实施方式中,可以通过电压转换电路对滤波信号进行处理,将高电平的滤波信号转换为低电平信号、将低电平的滤波信号转换为高电平信号,因此根据处理后的信号中的低电平信号在一个周期中所占的比例同样可以计算飞轮的位置和转速。
30.由于数字信号为脉冲信号,具体地,本实施例中,数字处理模块对第一个脉冲的处理参照步骤s20,步骤s20如下:s20:当数字处理模块在数字信号的第一个周期中即数字处理模块接收到第一个脉冲时获取数字信号的最大电压值e1,然后将最大电压值e1与比例系数相乘,并将阈值电压v
th
更新为e1。
31.本实施例中,阈值电压v
th
的初始值可以根据单齿在边界在磁转速传感器时磁转速传感器的输出电压确定。
32.本实施例中,数字处理模块对第二个脉冲的处理参照步骤s21,步骤s21如下:s21:数字处理模块在数字信号的第二个周期中寻找数字信号的电压向上过零点和最大电压值e2,并计算该电压向上过零点与最大电压值之间的距离d2,然后将最大电压值e2与比例系数相乘,并将阈值电压v
th
更新为e2,电压向上过零点是数字信号的电压幅值大于0v的起始点。
33.从步骤s20和s21中可以得到,数字处理模块在接收到第一个脉冲和第二个脉冲时会获取当前脉冲的最大电压值,然而根据该最大电压值调整阈值电压v
th
,进而确保飞轮上的单齿离开磁转速传感器的位置刚好和滤波后的信号的下降沿位置相对应。
34.本实施例中,数字处理模块对第n个脉冲的处理过程如下:s22:所述数字处理模块在接收到的所述数字信号的第n个周期中,n为整数且大于2,寻找第n个周期中的电压向上过零点,并计算第n
‑
1个周期的周期长度tn
‑
1;s23:所述数字处理模块根据公式求解出,其中为设计单齿周长与飞轮周长之比;s24:所述数字处理模块根据公式更新比例系数,根据公式更新,是数字信号的第n
‑
1个周期中的最大电压值和数字信号的第n
‑
2个周期的最大电压值的比值;s25:所述数字处理模块根据公式更新阈值电压v
th
;s26:所述数字处理模块寻找所述数字信号在第n个周期中的最大电压值en,计算第n个周期中的电压向上过零点和最大电压值en之间的距离dn,然后更新阈值电压。
35.步骤s23中的公式解释如下:当数字信号的每个周期不一定相同时,由于为设计单齿周长与飞轮周长之比固定且已知,因此单齿在经过磁转速传感器时磁转速传感器输出的信号占整个周期的比例在理论上和一样,因此定义变量x,x是当比飞轮转动时,单齿边
界在磁转速传感时对应的点,通过求取第n
‑
1个周期中的电压最大值点与电压向上过零点的距离dn
‑
1,以及将(dn
‑1‑
x)*2便可得到飞轮上的单齿经过磁转速传感器的时间,该时间与周期时间的比值与和一样。
36.在得出x后,便得到了第n
‑
1个周期中单齿经过磁转速传感器时所对应的点,然后根据x按照步骤s24中的公式重新计算比例系数。从而确保当前周期中的比例系数能根据上个周期中的数字信号进行调整,进而降低飞轮的定位误差。
37.另外,当在数字处理模块在第n个周期中接收数字信号时,如果第n
‑
1个周期中的数字信号的最大电压值en
‑
1和第n
‑
2个周期中的数字信号的最大电压值en
‑
2不一样,存在偏差,那么在第n个周期中如果不对这个偏差进行调整,同样会造成滤波后的信号的高低电平位置在第n个周期中的位置和单齿经过磁转速传感器的位置在飞轮转动一圈的位置不匹配,造成定位误差。因此步骤s24在重新定义比例系数时还引入了变量,是数字信号在第n
‑
1个周期中的最大电压值和数字信号在第n
‑
2个周期的最大电压值的比值,通过将第n
‑
1个周期中的最大电压值和数字信号的第n
‑
2个周期的最大电压值的比值变化带入到第n个周期中的最大电压值的变化,可以降低定位误差。
38.本实施例中,数字处理模块寻找当前周期的电压向上过零点的过程如下:数字处理模块对输入的数字信号进行采样,将数字信号的电压大于0v的第一个采样点作为当前周期的电压向上过零点。
39.本实施例中,步骤s2中,数字处理模块寻找当前周期的最大电压值e的过程如下:数字处理模块对输入的数字信号进行采样,将当前采样的数字信号的电压与上次采样的数字信号的电压进行比较,如果当前采样的数字信号的电压小于上次采样的数字信号的电压,则将上次采样的数字信号的电压作为最当前周期的最大电压值,然后结束寻找当前周期的最大电压值本实施例中,变量的初始值是1。
40.另外从步骤s26中可以得到,在数字信号的第n个周期中,在没有求出第n个周期中的最大电压值en时,数字处理模块中用到的阈值电压v
th
是步骤s25中更新的阈值电压v
th
,当求出数字信号在第n个周期中的最大电压值en时立即更新阈值电压,进而确保飞轮上的单齿离开磁转速传感器的位置刚好和滤波后的信号的下降沿位置相对应。
41.本发明的对磁转速传感器的输出信号即图6的波形滤波后的效果图参照图7,图7中的正弦波是飞轮上的单齿经过磁转速传感器时磁转速传感器的输出信号的波形,图7中高电平方波是采用本发明的对磁感应传感器输出的信号进行滤波后的波形。
42.综上,本发明在时间使用时具有以下有益效果:1:本发明的滤波方法中根据单齿的周长与飞轮的周长之比以及数字信号在当前周期的最大电压值来调节数字处理模块中的阈值电压v
th
,对电压幅值小于阈值电压v
th
的数字信号进行滤波,可以确保滤波后的信号的波形于实际单齿接近磁转速传感器的位置匹配,即信号的波形的上升沿对应的就是单齿的边界靠近磁转速传感器的位置,信号的波形的下降沿对应的就是单齿的边界离开磁转速传感器的位置。尤其是信号的波形的下降沿即单齿离开磁转速传感器的位置,与飞轮的转速快慢无关。
43.2:数字处理模块接收的数字信号在第n个周期中时,会先根据第n
‑
1个周期的最大
电压值en
‑
1和第n
‑
2个周期中的最大电压值en
‑
2的比例关系来预测第n个周期的最大电压值en,并根据预测的第n个周期的最大电压值en来调节数字处理模块在第n个周期的阈值电压v
th
,以此确保第n个周期的阈值电压v
th
能够根据根据第n
‑
1个周期的最大电压值en
‑
1和第n
‑
2个周期中的最大电压值en
‑
2的变化而变化,另外当获取到数字信号在第n个周期的最大电压值en时立即将第n个周期的阈值电压v
th
更新为,进而确保滤波后的信号在第n个周期中的下降沿位置与单齿离开磁转速传感器的位置相匹配。
44.上述依据本发明为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1