一种确定汽车前部照明灯具道路照明范围的方法与流程
1.本发明涉及汽车灯具照明领域,具体涉及一种确定汽车前部照明灯具道路照明范围的方法。
背景技术:
2.汽车前部照明灯具对夜间道路照明具有重要作用,主要包括远光灯、近光灯、前雾灯、角灯等,用于向驾驶员提供夜间及雾、雨、雪等天气条件下的道路照明,帮助驾驶员发现前方道路障碍物或行人,以便采取规避或制动措施。其中,远光灯、近光灯功能为汽车强制配置要求,可单独工作提供道路范围照明;前雾灯、角灯为选装配置,在具备该配置的车辆上可与远光灯、近光灯共同工作提供道路范围照明。
3.汽车前部照明灯具道路照明范围需求目前无量化确定方法,一般以3lx照度为发现障碍物或行人作为照明范围边界确定条件,通过车型对标和主观评价对路面或路面上方0.25m高度(行人小腿中部高度)的照明范围进行确定。但该方法未考虑实际道路特点,且不同车型的性能存在差异,如不能结合车辆制动性能确定灯具道路照明范围,光束将不能照射到需求区域,光学利用率降低,致使驾驶员无法及时发现前方障碍采取规避措施,导致交通事故隐患。
4.本发明涉及一种汽车前部照明灯具道路照明范围计算方法,可以根据车辆制动性能、道路参数和实际车辆行驶速度确定道路照明范围,有效提高灯具光能利用效率,降低车辆事故发生概率,目前无相关专利与本发明相关。
技术实现要素:
5.本发明提供了一种确定汽车前部照明灯具道路照明范围的方法,适用于路面或路面上方某一高度任意照度的照明范围确定。
6.本发明的技术方案为:
7.本发明提供了一种确定汽车前部照明灯具道路照明范围的方法,所述方法包括:
8.基于不同车辆行驶速度或不同等级道路的设计速度确定车辆分别行驶在直行道路、弯道、和十字路口的车辆制动距离;
9.基于不同车辆行驶速度或不同等级道路的设计速度、车辆行驶在直行道路的车辆制动距离、直行道路的车道宽度和行人速度,计算车辆行驶在直行道路上的照射距离和单侧照射宽度,以绘制形成车辆行驶在直行道路时的最小照明范围需求nurbs曲线;
10.基于不同车辆行驶速度或不同等级道路的设计速度、车辆在弯道的车辆制动距离、弯道的车道宽度、弯道半径和行人速度,计算车辆行驶在弯道时的照射距离和单侧照射宽度,以绘制形成车辆行驶在弯道时的最小照明范围需求nurbs曲线;
11.基于不同车辆行驶速度或不同等级道路的设计速度、车辆在十字路口时的车辆制动距离、十字路口的车道宽度、十字路口的路缘石转弯半径和行人速度,计算车辆行驶在十字路口时的照射距离和单侧照射宽度,以绘制形成车辆行驶在十字路口时的最小照明范围
d2)/2mb];
30.通过公式:
31.w
十
=b sin(α+γ)
32.计算车辆行驶在十字路口时的单侧照射宽度l
十
;
33.其中,r为基于车辆行驶在十字路口时的路缘石转弯半径r计算出的弯道半径、s
十
为车辆行驶在十字路口时的车辆制动距离、v
十
为十字路口的设计速度或车辆行驶在十字路口时的车辆行驶速度、a
十
为车辆行驶在十字路口时的行人速度、h
十
为车辆行驶在十字路口时的车道宽度;在十字路口的设计速度或车辆行驶速度超过60km/h时,行人速度a
十
为0;
34.将在不同弯道半径r、不同设计速度或不同车辆行驶速度v
十
、不同行人速度a
弯
,不同车道宽度h
十
和不同车辆制动距离s
十
下计算出的照射距离l
十
和单侧照射宽度w
十
组合形成多组坐标点,进而绘制形成车辆行驶在十字路口时的最小照明范围需求nurbs曲线。
35.优选地,所述方法还包括:
36.基于车辆的近光灯明暗截止线,从形成的车辆前部照明灯具最小道路照明范围中划分并拟合形成车辆的前部近光灯最小道路照明范围。
37.本发明的有益效果为:
38.可以根据车辆制动性能和实际道路参数准确计算前部照明灯具的最小道路照明范围,既可以满足道路照明需求降低车辆事故发生概率,又可以精准高效利用光能减少能量浪费。
附图说明
39.以下将结合附图和实例对本发明做进一步描述。
40.图1为本发明方法的实施原理图;
41.图2为直行道路范围计算原理图;
42.图3为弯道照明范围计算原理图;
43.图4为十字路口照明范围计算原理图;
44.图5为直行道路对应的最大照明范围曲线;
45.图6为弯道对应的最大照明范围曲线;
46.图7为十字路口对应的最大照明范围曲线;
47.图8为近光灯具对应的最大照明范围拟合曲线;
48.图9为远光灯具对应的最大照明范围拟合曲线。
具体实施方式
49.本发明提供一种汽车前部照明灯具道路照明范围需求计算方法,能够根据车辆制动性能和实际道路参数计算车辆道路照明范围需求。
50.如图1所示,本发明所述道路照明范围需求计算方法,采用路面或路面上方0.25m高度(行人小腿中部高度)3lx照度参数进行计算,其步骤如下:
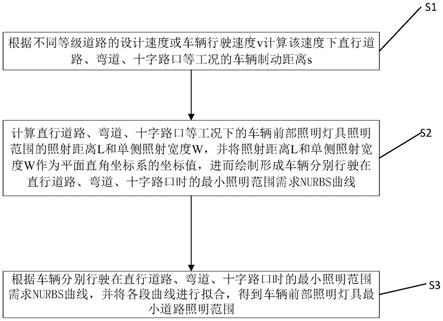
51.步骤s1:根据不同等级道路的设计速度或车辆行驶速度v计算该速度下直行道路、弯道、十字路口等工况的车辆制动距离s。
52.具体来说,该可以得到车辆行驶在直行道路时的车辆制动距离s
直
,车辆行驶在弯
道时的车辆制动距离s
弯
,以及车辆行驶在十字路口的车辆制动距离s
十
。
53.其中,计算上述车辆制动距离的具体计算方式为基于具体的设计速度或车辆行驶速度来进行计算,具体计算方式为现有技术。
54.步骤s2:按下列公式计算直行道路、弯道、十字路口等工况下的车辆前部照明灯具照明范围的照射距离l和单侧照射宽度w,并将照射距离l和单侧照射宽度w作为平面直角坐标系的坐标值,进而绘制形成车辆分别行驶在直行道路、弯道、十字路口时的最小照明范围需求nurbs曲线。
55.进一步地,对于高速公路、快速路采取控制出入形式,无非机动车和机动车混行和平面道路交叉,因此无需考虑行人可见范围,即此时的行人速度考虑为0。
56.进一步地,高速公路、快速路采取控制出入形式,无平面道路交叉,因此无需考虑十字路口工况。
57.进一步地,车辆的左侧近光灯存在明暗截止线,明暗截止线落地距离取50m或75m,以此计算左侧近光灯的照明宽度。
58.如图1,对于车辆行驶在直行道路时的照射距离l
直
和单侧照射宽度w
直
的计算方式为:
59.l
直
=s
直
ꢀꢀꢀ
式1
60.w
直
=a
直s直
/v
直
+h
直
/2
ꢀꢀꢀ
式2
61.式中,l
直
为车辆行驶在直行道路时的照射距离、w
直
为车辆行驶在直行道路时的单侧照射宽度、s
直
为车辆行驶在直行道路时的车辆制动距离、v
直
为直行道路的设计速度或车辆行驶速度、a
直
为车辆行驶在直行道路时的行人速度、h
直
为车辆行驶在直行道路时的车道宽度。
62.其中,在直行道路的设计速度或车辆行驶速度超过60km/h时,行人速度a
直
为0。
63.通过上述计算方式,可以计算出车辆行驶在直行道路时的左侧照射宽度和右侧照射宽度。
64.将在不同设计速度或不同车辆行驶速度v
直
、不同行人速度a
直
,不同车道宽度h
直
和不同车辆制动距离s
直
下计算出的照射距离l
直
和单侧照射宽度w
直
组合形成多组坐标点,进而绘制形成车辆行驶在直行道路时的最小照明范围需求nurbs曲线。
65.如图2所示,车辆在进入弯道初始位置照明宽度要求最高,在离开弯道终点位置照明距离要求最高。对于车辆行驶在弯道时的照射距离l
弯
和单侧照射宽度w
弯
的计算方式为:
66.l
弯
=b cos(α+γ)
ꢀꢀꢀ
式3
[0067][0068]
m=2r sina/2
ꢀꢀꢀ
式5
[0069]
a=180s
弯
/πr
弯
ꢀꢀꢀ
式6
[0070]
d=a
弯s弯
/v
弯
+h
弯
/2
ꢀꢀꢀ
式7
[0071]
β=(180-a)/2
ꢀꢀꢀ
式8
[0072]
α=a/2
ꢀꢀꢀ
式9
[0073]
γ=cos-1
[(m2+b
2-d2)/2mb]
ꢀꢀ
式10
[0074]
式中,lr
弯
为弯道半径,s
弯
为车辆行驶在弯道时的车辆制动距离,v
弯
为弯道的设计
速度或车辆行驶在弯道时的车辆行驶速度,a
弯
为车辆行驶在弯道时的行人速度,h
弯
为车辆行驶在弯道时的车道宽度;在弯道的设计速度或车辆行驶速度超过60km/h时,行人速度a
弯
为0。
[0075]
将式5、6、7、8代入式4则可得b,由式6、9可得α,由式5、6、7、8代入式10可得γ,由此依据式3可求l
弯
。
[0076][0077]
式中,w
弯
为单侧照射宽度。
[0078]
由于l
弯
和b已知,可由式11直接求得w
弯
,或通过将式4至式10代入式12求得。
[0079]w弯
=b sin(α+γ)
ꢀꢀꢀ
式12
[0080]
通过上述计算方式,可以计算出车辆行驶在弯道时的左侧照射宽度和右侧照射宽度。
[0081]
将在不同弯道半径r
弯
、不同设计速度或不同车辆行驶速度v
弯
、不同行人速度a
弯
,不同车道宽度h
弯
和不同车辆制动距离s
弯
下计算出的照射距离l
弯
和单侧照射宽度w
弯
组合形成多组坐标点,进而绘制形成车辆行驶在弯道时的最小照明范围需求nurbs曲线。
[0082]
如图3所示,对于车辆行驶在十字路口时的照射距离和宽度计算公式与弯道相同,如式13至式21。
[0083]
对于车辆行驶在弯道时的照射距离l
弯
和单侧照射宽度w
弯
的计算方式为:
[0084]
l
十
=b cos(α+γ)
ꢀꢀꢀ
式13
[0085][0086]
m=2r sina/2
ꢀꢀꢀ
式15
[0087]
a=180s
十
/πr
十
ꢀꢀꢀ
式16
[0088]
d=a
十s十
/v
十
+h
十
/2
ꢀꢀꢀ
式17
[0089]
β=(180-a)/2
ꢀꢀꢀ
式18
[0090]
α=a/2
ꢀꢀꢀ
式19
[0091]
γ=cos-1
[(m2+b
2-d2)/2mb]
ꢀꢀꢀ
式20
[0092]
通过公式:
[0093]w十
=b sin(α+γ)
ꢀꢀꢀ
式21
[0094]
计算车辆行驶在十字路口时的单侧照射宽度l
十
;
[0095]
其中,r为基于车辆行驶在十字路口时的路缘石转弯半径r计算出的弯道半径、s
十
为车辆行驶在十字路口时的车辆制动距离、v
十
为十字路口的设计速度或车辆行驶在十字路口时的车辆行驶速度、a
十
为车辆行驶在十字路口时的行人速度、h
十
为车辆行驶在十字路口时的车道宽度;在十字路口的设计速度或车辆行驶速度超过60km/h时,行人速度a
十
为0;
[0096]
其中,车辆左侧、右侧的弯道半径r分别为:
[0097]r左
=r
左
+3r
十
/2
ꢀꢀꢀ
式13
[0098]r右
=r
右
+r
十
/2
ꢀꢀꢀ
式14
[0099]
式中,r
左
为左侧路缘石转弯半径,r
右
为右侧路缘石转弯半径。
[0100]
将在不同弯道半径r、不同设计速度或不同车辆行驶速度v
十
、不同行人速度a
弯
,不
同车道宽度h
十
和不同车辆制动距离s
十
下计算出的照射距离l
十
和单侧照射宽度w
十
组合形成多组坐标点,进而绘制形成5至图7的车辆行驶在十字路口时的最小照明范围需求nurbs曲线。
[0101]
步骤s3:根据车辆分别行驶在直行道路、弯道、十字路口时的最小照明范围需求nurbs曲线,并将各段曲线进行拟合,得到车辆前部照明灯具最小道路照明范围。
[0102]
经过对图5至图7的三类曲线进行拟合,得到如图9所示的车辆前部照明灯具最小道路照明范围。其中,拟合的具体方式采用现有拟合方式。
[0103]
进一步地,可通过不同道路等级的设计速度或行驶速度对远光、近光的照明范围进一步细分。本实施例中,由于近光左侧存在明暗截止线,左侧照明宽度按实际灯光落地距离计算,一般明暗截止线落地距离取50m或75m。本实施例中,基于车辆的近光灯明暗截止线,从形成的车辆前部照明灯具最小道路照明范围中划分并拟合形成车辆的前部近光灯最小道路照明范围。
[0104]
采用本发明在一个假想车型上计算前部灯具照明范围作为具体实施例。其中,不同道路等级设计速度v如表1,十字路口转弯速度如表2,弯道半径r如表3,路缘石转弯半径r如表4,行人速度a为1m/s,车道宽度h为3.75m。设计速度60km/h以下适用近光,明暗截止线落地距离75m,60km/h以上适用远光。
[0105]
表1
[0106][0107][0108]
表2
[0109][0110]
表3
[0111][0112]
表4
[0113][0114]
步骤101:根据表1、2、4中不同等级道路的设计速度v测试确定车辆制动距离s,如表5;
[0115]
表5
[0116][0117][0118]
步骤102:按公式计算直行道路、弯道、十字路口等工况下的车辆前部照明灯具照明范围的距离l和宽度w,如表6。
[0119]
表6
[0120]
[0121][0122]
步骤103:将表6的坐标值分别绘制直行道路、弯道、十字路口等工况的照明范围需求曲线,如图5、6、7所示。将各段曲线进行拟合,以设计速度60km/h作为远近光照明范围分界速度,近光明暗截止线落地距离75m,得到车辆前部照明灯具近光、远光道路照明范围,如图8、9所示。
[0123]
本实施例上述方法,可以根据车辆制动性能和实际道路参数准确计算前部照明灯具的最小道路照明范围,既可以满足道路照明需求降低车辆事故发生概率,又可以精准高效利用光能减少能量浪费。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1