一种柔性PCB板的锡膏印刷机的制作方法
一种柔性pcb板的锡膏印刷机
技术领域
1.本实用新型涉及锡膏印刷机技术领域,具体涉及一种柔性pcb板的锡膏印刷机。
背景技术:
2.现代锡膏印刷机一般由装版、加锡膏、压印、输电路板等机构组成。它的工作原理是:先将要印刷的电路板固定在印刷定位台上,然后由印刷机的左右刮刀把锡膏或红胶通过钢网漏印于对应焊盘,对漏印均匀的pcb,通过传输台输入至贴片机进行自动贴片。
3.但现有的锡膏打印机,对于柔性pcb板的印刷效果并不好。
技术实现要素:
4.本实用新型的目的在于针对现有技术的缺陷和不足,提供一种柔性pcb板的锡膏印刷机,具有印刷柔性pcb板效果好的优势。
5.为实现上述目的,本实用新型采用的技术方案是:一种柔性pcb板的锡膏印刷机,包括:安装底板,控制机构,以及设于所述安装底板上、且均与所述控制机构电连接的矫正平台、张紧机构、对位平台、ccd机构、钢网升降机构;所述矫正平台用于调整位于其上面的工作平台的位置,所述张紧机构位于所述矫正平台的输入端、用于张紧柔性pcb板,所述对位平台位于所述矫正平台的输出端、用于将所述柔性pcb板张紧且拉动到指定位置,所述钢网升降机构位于所述矫正平台的一侧、用于控制钢网对位于所述工作平台上的柔性pcb板进行印刷,所述ccd机构位于所述矫正平台的另一侧、用于对印刷的所述柔性pcb板进行检测。
6.本实用新型进一步设置,所述柔性pcb板的锡膏印刷机还包括:设有进料口和出料口的保护壳,设于所述保护壳内的机架;所述安装底板、所述控制机构、所述矫正平台、所述张紧机构、所述对位平台、所述ccd机构、所述钢网升降机构均位于所述保护壳内;所述张紧机构的输入端位于所述进料口处,所述对位平台的输出端位于所述出料口处。
7.本实用新型进一步设置,所述张紧机构包括:张紧机构底座,装配于所述张紧机构底座上的u型支架,架设于所述u型支架上的第一张力滚筒,架设于所述u型支架上、且位于所述第一张力滚筒上的压紧滚筒,分别装配于所述u型支架同一侧不同端的延长支架,架设于所述延长支架上、且与所述第一张力滚筒、所述压紧滚筒均平行的第二张力滚筒,以及输出端连接于所述第一张力滚筒一端的、用于传递动力的张紧机构控制器;所述柔性pcb板穿设于所述第一张力滚筒和所述压紧滚筒之间、且盖设于所述第二张力滚筒上侧。
8.本实用新型进一步设置,所述u型支架下侧设有第一滑块,所述张紧机构底座上侧设有供所述第一滑块滑动的第一滑条,所述张紧机构底座下侧设有第二滑块,所述第二滑块下侧设有供所述第二滑块滑动的第二滑条,所述第一滑条与所述第二滑条垂直设置。
9.本实用新型进一步设置,所述张紧机构控制器为磁粉制动器或伺服电机。
10.本实用新型进一步设置,所述对位平台包括:定位轨道,分别装配于所述定位轨道内侧两端的两个皮带轮,装配于两个所述皮带轮之间的皮带,输出端连接于其中一个所述
皮带轮的对位平台控制电机,固定装配于所述定位轨道输出端上的固定座,固定装配于所述皮带上、且在所述定位轨道上滑动的活动座,分别装配于所述固定座两侧及所述活动座两侧的四个对位平台升降气缸,以及,装配于所述对位平台升降气缸上侧的夹板;所述柔性pcb板铺设于所述固定座和所述活动座上侧;所述对位平台升降气缸控制带动所述夹板夹紧或松开所述柔性pcb板。
11.本实用新型进一步设置,所述定位轨道下侧设有用于带动所述定位轨道移动的移动装置;所述移动装置包括:对位平台底座,固定装配于所述定位轨道下侧的第三滑块,固定装配于所述对位平台底座上侧的、供所述第三滑块滑动的第三滑条,固定装配于所述对位平台底座下侧的第四滑块,以及设于所述第四滑块下侧、供所述第四滑块滑动的第四滑条;所述第三滑条与所述第四滑条垂直设置。
12.本实用新型进一步设置,所述ccd机构包括:支撑座,设于所述支撑座上的第一滑轨,设于所述第一滑轨上的第一丝杠,在所述第一丝杠上滑动的滑动器,设于所述第一丝杠一端、用于控制所述滑动器的ccd
‑
x轴电机,设于所述滑动器上、与所述第一滑轨垂直设置的第二滑轨,设于所述第二滑轨上的第二丝杠,在所述第二丝杠上滑动的ccd
‑
相机,装配于所述ccd
‑
相机下侧的ccd
‑
光源,以及设于所述第二丝杠一端、用于控制所述ccd
‑
相机的ccd
‑
y轴电机。
13.本实用新型进一步设置,所述矫正平台包括:矫正平台主体,以及设于所述矫正平台主体上、用于控制所述矫正平台主体的矫正平台x轴电机、矫正平台y轴电机、矫正平台升降气缸。
14.采用上述技术方案后,本实用新型有益效果为:
15.1、在本实用新型中,设有控制机构、矫正平台、张紧机构、对位平台、ccd机构和钢网升降机构,实现了柔性pcb板的连续自动打印;又通过张紧机构和对位平台配合,将柔性pcb板张紧,并拉动到设定的位置,使得柔性pcb板的印刷效果更好。
16.2、在本实用新型中,设有第一张力滚筒、第二张力滚筒、压紧滚筒和张紧机构控制器,使用时,柔性pcb板穿设于第一张力滚筒和压紧滚筒之间、且盖设于第二张力滚筒上侧,张紧机构控制器能够传递、制动扭矩,通过控制第一张力滚筒进而能够控制柔性pcb板的连续滑动和张力控制,使得柔性pcb板进入矫正平台上的工作平台后的印刷效果更好。
17.3、在本实用新型中,对位平台升降气缸升降带动夹板夹紧或松开柔性pcb板,对位平台控制电机带动皮带运动进而带动活动座在定位轨道上来回滑动,通过固定座、活动座、及其上面的零部件的配合,压紧柔性pcb板,并在控制机构的控制下,带动柔性pcb板到指定位置。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
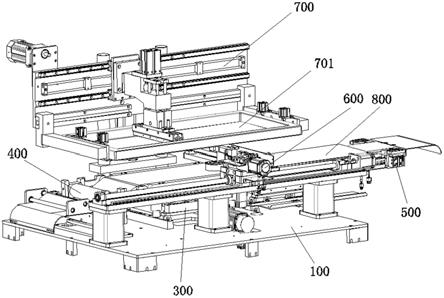
19.图1是本实用新型的结构示意图;
20.图2是本实用新型的主体的结构示意图;
21.图3是张紧机构的结构示意图;
22.图4是张紧机构的另一结构示意图;
23.图5是铺设有柔性pcb板的对位平台的结构示意图;
24.图6是装配有平台面板的对位平台的结构示意图;
25.图7是对位平台的结构示意图;
26.图8是活动座的结构示意图;
27.图9是移动装置的结构示意图;
28.图10是ccd机构的结构示意图;
29.图11是矫正平台的结构示意图。
30.附图标记说明:100、安装底板;200、控制机构;300、矫正平台;301、工作平台;302、矫正平台主体;303、矫正平台x轴电机;304、矫正平台y轴电机;305、矫正平台升降气缸;400、张紧机构;401、张紧机构底座;402、u型支架;403、第一张力滚筒;404、压紧滚筒;405、延长支架;406、第二张力滚筒;407、第一滑块;408、第一滑条;409、第二滑块;410、第二滑条;411、第一保护板;412、第二保护板;413、延长板;414、辅助支架;415、第三张力滚筒;416、伺服电机;500、对位平台;501、定位轨道;502、皮带轮;503、皮带;504、对位平台控制电机;505、固定座;506、活动座;5061、第五滑块;5062、支撑件;5063、连接件;5064、支撑板;507、对位平台升降气缸;508、夹板;509、移动装置;5091、对位平台底座;5092、第三滑块;5093、第三滑条;5094、第四滑块;5095、第四滑条;510、定位板;511、平台面板;600、ccd机构;601、支撑座;602、第一滑轨;603、第一丝杠;604、滑动器;605、ccd
‑
x轴电机;606、第二滑轨;607、第二丝杠;608、ccd
‑
相机;609、ccd
‑
光源;610、ccd
‑
y轴电机;700、钢网升降机构;701、钢网;800、柔性pcb板;900、保护壳;901、进料口;902、出料口;903、观察窗;1000、机架。
具体实施方式
31.以下结合附图对本实用新型作进一步详细说明。
32.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
33.本实施例涉及一种柔性pcb板的锡膏印刷机,如图1和图2所示,包括:安装底板100,控制机构200,以及设于安装底板100上、且均与控制机构200电连接的矫正平台300、张紧机构400、对位平台500、ccd机构600、钢网升降机构700。
34.具体的,矫正平台300用于调整位于其上面的工作平台301的位置。张紧机构400位于矫正平台300的输入端、用于张紧柔性pcb板800。对位平台500位于矫正平台300的输出端、用于将柔性pcb板800张紧且拉动到指定位置。钢网升降机构700位于矫正平台300的一侧、用于控制钢网701对位于工作平台301上的柔性pcb板800进行印刷。ccd机构600位于矫正平台300的另一侧、用于对印刷的柔性pcb板800进行检测。以上结构的配合,实现了柔性pcb板800的连续自动打印;又通过张紧机构400和对位平台500配合,将柔性pcb板800张紧,并拉动到设定的位置,使得柔性pcb板800的印刷效果更好。
35.优选的,如图1所示,柔性pcb板的锡膏印刷机还包括:设有进料口901和出料口902的保护壳900,以及设于保护壳900内的机架1000。安装底板100、控制机构200、矫正平台
300、张紧机构400、对位平台500、ccd机构600、钢网升降机构700均位于保护壳900内。张紧机构400的输入端位于进料口901处,对位平台500的输出端位于出料口902处。通过设有保护壳900和机架1000,使得该柔性pcb板的锡膏印刷机更加整体,且具有保护效果。此外,保护壳900上还设有观察窗903,便于工作人员及时观察柔性pcb板的锡膏印刷机的工作状态和进程。
36.具体的,在本实施例中,如图3所示,张紧机构400包括:张紧机构底座401,装配于张紧机构底座401上的u型支架402,架设于u型支架402上的第一张力滚筒403,架设于u型支架402上、且位于第一张力滚筒403上的压紧滚筒404,分别装配于u型支架402同一侧不同端的延长支架405,架设于延长支架405上、且与第一张力滚筒403、压紧滚筒404均平行的第二张力滚筒406,以及输出端连接于第一张力滚筒403一端的、用于传递动力的张紧机构控制器。柔性pcb板800穿设于第一张力滚筒403和压紧滚筒404之间、且盖设于第二张力滚筒406上侧。通过设有第一张力滚筒403、第二张力滚筒406、压紧滚筒404和张紧机构控制器,使用时,柔性pcb板800穿设于第一张力滚筒403和压紧滚筒404之间、且盖设于第二张力滚筒406上侧,张紧机构控制器能够传递、制动扭矩,通过控制第一张力滚筒403进而能够控制柔性pcb板800的连续滑动和张力控制,使得柔性pcb板800进入矫正平台300上的工作平台301后的印刷效果更好。在本实施例中,张紧机构控制器为伺服电机416,具有结构紧凑、快速响应、操作简单、使用安全可靠、耐用性好、易于实现远距离控制等优势;具体的,伺服电机416的伺服控制模式采用位置和转矩混合模式,运送柔性pcb板800时,伺服控制模式切换到位置模式,精准送料;柔性pcb板800到位后,伺服控制模式切换到转矩模式,反向张紧材料。在其他实施例中,张紧机构控制器可以为磁粉制动器,具有响应速度快、结构简单、无污染、无噪音、无冲击振动节约能源等优势。
37.进一步的,为了使张紧机构400能够调节位置,如图3所示,u型支架402下侧设有第一滑块407,张紧机构底座401上侧设有供第一滑块407滑动的第一滑条408,张紧机构底座401下侧设有第二滑块409,第二滑块409下侧设有供所述第二滑块409滑动的第二滑条410,第一滑条408与第二滑条410垂直设置。通过设有第一滑块407和第一滑条408,第二滑块409和第二滑条410,且第一滑条408与第二滑条410垂直设置,使得该张紧机构400能够沿x轴和y轴移动。
38.作为一个优选的方案,如图4所示,u型支架402的两侧分别装配有上端低于第一张力滚筒403上端的第一保护板411。u型支架402的一端装配有、用于供伺服电机416安装的第二保护板412。通过设有第一保护板411和的第三保护板,加强了该张紧机构400的整体稳固性,也起到保护第一张力滚筒403、第二张力滚筒406和伺服电机416的作用,而且由于第一保护板411的上端低于第一张力滚筒403的上端,使得第一保护板411并不会影响到柔性pcb板800的移动。
39.如图4所示,远离第二张力滚筒406的第一保护板411上装配有供柔性pcb板800放置的延长板413。通过设有延长板413,使得柔性pcb板800在该张紧机构400上的移动更加顺畅。延长板413上还设有辅助支架414;辅助支架414上设有若干第三张力滚筒415,通过设有辅助支架414和若干第三张力滚筒415,使得该张紧机构400的张紧效果更加突出。
40.作为又一个优选方案,如图5和图7所示,对位平台500包括:定位轨道501,分别装配于定位轨道501内侧两端的两个皮带轮502,装配于两个皮带轮502之间的皮带503,输出
端连接于其中一个皮带轮502的对位平台控制电机504,固定装配于定位轨道501输出端上的固定座505,固定装配于皮带503上、且在定位轨道501上滑动的活动座506,分别装配于固定座505两侧及活动座506两侧的四个对位平台升降气缸507,以及,装配于对位平台升降气缸507上侧的夹板508。
41.如图5所示,柔性pcb板800铺设于固定座505和活动座506上侧,对位平台升降气缸507升降带动夹板508夹紧或松开柔性pcb板800,对位平台控制电机504带动皮带503运动进而带动活动座506在定位轨道501上来回滑动,通过固定座505、活动座506、及其上面的零部件的配合,压紧柔性pcb板800,并在控制机构200的控制下,带动柔性pcb板800到指定位置。
42.具体的工作步骤为:首先,固定座505上的对位平台升降气缸507上的夹板508压紧柔性pcb板800;随后,活动座506在对位平台控制电机504的带动下后退到指定位置,活动座506上的对位平台升降气缸507下压,其夹板508压住柔性pcb板800;接着固定座505上的对位平台升降气缸507上升,其夹板508松开柔性pcb板800;最后,活动座506在对位平台控制电机504的带动下前进,并压紧拖动柔性pcb板800到达指定位置。以上步骤一直循环,直到整条柔性pcb板800均被打印完毕。
43.进一步的,如图6所示,该对位平台500还包括:装配于定位轨道501外侧两端的两个定位板510,以及装配于定位板510上侧、且位于固定座505和活动座506上侧的平台面板511。柔性pcb板800铺设于平台面板511上侧。通过设有平台面板511,用于供柔性pcb板800承载,使得柔性pcb板800的移动更加顺畅。
44.进一步的,为了使该对位平台500能够调节位置,如图9所示,定位轨道501下侧设有用于带动所述定位轨道501移动的移动装置509。具体的,移动装置509包括:对位平台底座5091,固定装配于定位轨道501下侧的第三滑块5092,固定装配于对位平台底座5091上侧的、供第三滑块5092滑动的第三滑条5093,固定装配于对位平台底座5091下侧的第四滑块5094,以及设于第四滑块5094下侧、供第四滑块5094滑动的第四滑条5095。第三滑条5093与所述第四滑条5095垂直设置,使得该对位平台500能够沿x轴和y轴移动。
45.更进一步的,如图8所示,具体的,活动座506包括:滑动装配于定位轨道501上的第五滑块5061,固定装配于第五滑块5061上的支撑件5062,固定装配于支撑件5062、且固定装配于皮带503的连接件5063,以及固定装配于支撑件5062上的支撑板5064。连接件5063固定在皮带503上,而第五滑块5061装配在定位轨道501上,对位平台控制电机504带动皮带503运动,进而带动连接件5063,进而带动第五滑块5061在定位轨道501上滑动。
46.作为又一个优选方案,如图10所示,ccd机构600包括:支撑座601,设于支撑座601上的第一滑轨602,设于第一滑轨602上的第一丝杠603,在第一丝杠603上滑动的滑动器604,设于第一丝杠603一端、用于控制滑动器604的ccd
‑
x轴电机605,设于滑动器604上、与第一滑轨602垂直设置的第二滑轨606,设于第二滑轨606上的第二丝杠607,在第二丝杠607上滑动的ccd
‑
相机608,装配于ccd
‑
相机608下侧的ccd
‑
光源609,以及设于第二丝杠607一端、用于控制ccd
‑
相机608的ccd
‑
y轴电机610。ccd机构600有助于给予控制机构200反馈,使得控制机构200能够更精准的控制钢网升降机构700对柔性pcb板800进行印刷。
47.作为又一个优选方案,如图11所示,矫正平台300包括:矫正平台主体302,以及设于矫正平台主体302上、用于控制矫正平台主体302的矫正平台x轴电机303、矫正平台y轴电机304、矫正平台升降气缸305。
48.本实用新型的工作原理大致如下述:将需要印刷的柔性pcb板800放置在张紧机构400上,然后通过控制机构200的控制,张紧机构400将柔性pcb板800运输至矫正平台300上再运输到对位平台500上,接着对位平台500会压紧柔性pcb板800,并在控制机构200的控制下,拖动柔性pcb板800到指定位置,控制机构200也会控制钢网升降机构700进行印刷工作,ccd机构600对其印刷的柔性pcb板800进行检测,印刷完后柔性pcb板800流入到下个程序。
49.以上,仅用以说明本实用新型的技术方案而非限制,本领域普通技术人员对本实用新型的技术方案所做的其它修改或者等同替换,只要不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1