垂直框架清洗设备的制作方法
1.本实用新型涉及一种垂直框架清洗设备,更特别地涉及一种可固持基板并在输送过程中进行清洗的垂直框架清洗设备。
背景技术:
2.印刷电路基板是一种在高科技电子产业中重要的应用物品。一般而言,当基板表面布上线路后,需要以特殊的药水以及溶剂进行清洗、显影、刻蚀以及剥膜等处理步骤后,才能符合各段制程以及产品使用上的规格要求以及预定精度。然而,目前市面上对于基板进行上述处理步骤时并没有一套标准化的流程设备,不仅容易使得基板的表面状况劣化,且无论是产速、药量、输送等方面上皆缺乏统一的控制流程。
技术实现要素:
3.基于本实用新型的至少一个实施例,本实用新型的垂直框架清洗设备可固持基板并在输送过程中进行清洗,以期达到改善自动化进程以及提高产品良率的效果。
4.本实用新型提供一种垂直框架清洗设备,适于对基板进行清洗,且垂直框架清洗设备包括至少一个框架、入料模块、清洗模块、暂存模块以及出料模块。框架包括架体以及固持部,其中固持部可动地连接于架体,且框架通过固持部固持基板以使基板的法向平行于地面;入料模块包括第一基板提取单元、第一开框机构以及第一输送单元,其中第一开框机构包括第一容置部以及第一开框部,第一容置部适于容置框架,第一开框部配置于第一容置部上,且第一开框机构通过第一开框部固定框架并使固持部相对于架体开合,第一输送单元适于将框架沿第一方向输送;清洗模块配置于入料模块的第一方向上,且包括出液单元、干燥单元以及第二输送单元,其中出液单元包括多个出液件,干燥单元包括多个干燥件,且出液单元以及干燥单元配置于框架移动路径的两侧,第二输送单元适于将框架沿第一方向输送;暂存模块配置于清洗模块的第一方向上,且包括多个暂存部、滑轨、活动部以及第三输送单元,暂存部沿第二方向相邻配置,滑轨配置于这些暂存部之间且沿第二方向延伸,活动部滑设于滑轨上,第三输送单元配置于暂存部以及活动部上;出料模块配置于暂存模块的第一方向上,且包括第二基板提取单元、第二开框机构以及第四输送单元,其中第二开框机构包括第二容置部以及第二开框部,第二容置部适于容置框架,第二开框部配置于第二容置部上,且第二开框机构通过第二开框部固定框架并使固持部相对于架体开合。
5.在实施例中,上述的固持部包括固持件,第一开框机构还包括开框传感器,且开框传感器电性连接于第一开框部。
6.在实施例中,上述的入料模块还包括影像传感器,且影像传感器用以侦测第一基板提取单元与基板的相对位置。
7.在实施例中,上述的清洗模块还包括摆动机构,其中摆动机构沿第一方向以及第三方向往复摆动,且出液单元连接于摆动机构上。
8.在实施例中,上述出液件的一个部分连接于显影液源,且出液件的另一个部分连
接于清洗液源。
9.在实施例中,上述的清洗模块还包括静电消除单元,且静电消除单元配置于干燥单元的第一方向上。
10.在实施例中,上述的第一输送单元、第二输送单元、第三输送单元以及第四输送单元分别包括多个发动机以及多个滚轮,这些发动机通过多个齿轮以及多个传动轴驱动滚轮,且齿轮为正齿轮或斜齿轮。
11.在实施例中,上述的第一输送单元、第二输送单元、第三输送单元以及第四输送单元还分别包括输送控制单元以及多个位置传感器,且框架的数量为多个。当这些位置传感器中的任一位置传感器侦测到这些框架中的任一框架与另一框架的距离小于阈值时,输送控制单元控制对应于框架的发动机停止运作。
12.在实施例中,上述的干燥件连接于气源,且清洗模块的底部配置有集液件以及至少一个液量传感器。
13.在实施例中,垂直框架清洗设备还包括回流模块,回流模块连接于入料模块以及暂存模块之间且与清洗模块平行配置,回流模块包括第五输送单元,且第五输送单元适于将框架沿相反于第一方向的方向输送。
14.借此,本实用新型的垂直框架清洗设备能分别通过第一基板提取单元、第一开框机构以及第二基板提取单元、第二开框机构使基板安装至框架上或从框架上卸除,并通过第一输送单元、第二输送单元、第三输送单元以及第四输送单元在通过清洗模块以及暂存模块的过程中完成处理作业,从而达到自动化进程以及提高产品良率的效果。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例描述中需求要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
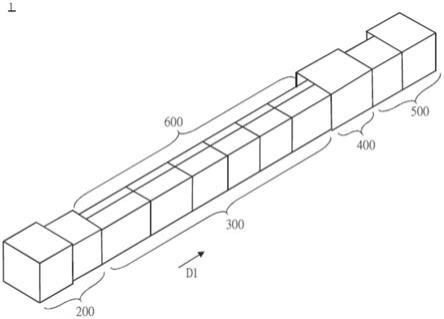
16.图1为本实用新型的垂直框架清洗设备的实施例的立体示意图;
17.图2为多个托盘的侧视示意图;
18.图3为图1的垂直框架清洗设备中的框架的立体示意图;
19.图4为图3的框架的固持部的立体示意图;
20.图5为图3的框架自回流模块移动至入料模块的立体示意图;
21.图6为图5中的框架移动至第一开框机构的示意图;
22.图7为图6另一角度的放大示意图;
23.图8为本实施例的入料模块的立体示意图;
24.图9为装载基板的框架即将自入料模块输送至清洗模块的立体示意图;
25.图10为本实施例的第一输送单元的立体示意图;
26.图11为图10的第一输送单元部分元件的前视示意图;
27.图12为本实施例的清洗模块一个部分的立体示意图;
28.图13为图12的清洗模块的集液件以及液量传感器的立体示意图;
29.图14为本实施例的清洗模块另一个部分的立体示意图;
30.图15为本实施例的暂存模块的立体示意图;
31.图16为图15的暂存模块将框架移动至暂存部的示意图;
32.图17为图16中的框架自暂存模块移动至出料模块的示意图;
33.图18为本实施例的出料模块的立体示意图;
34.图19为本实施例的回流模块的立体示意图。
35.【附图标记】
36.1 垂直框架清洗设备
37.100 框架
38.110 架体
39.120 固持部
40.122 固持件
41.126 盒体
42.200 入料模块
43.210 第一基板提取单元
44.220 第一开框机构
45.222 第一容置部
46.224 第一开框部
47.226 开框传感器
48.230 第一输送单元
49.231 发动机
50.232 滚轮
51.233 齿轮
52.234 传动轴
53.235 输送控制单元
54.236 位置传感器
55.237 止滑件
56.240 影像传感器
57.250 第一滑轨
58.260 第二滑轨
59.300 清洗模块
60.310 出液单元
61.312 出液件
62.320 干燥单元
63.322 干燥件
64.330 第二输送单元
65.340 摆动机构
66.360 集液件
67.370 液量传感器
68.400 暂存模块
69.410 暂存部
70.420 活动部
71.430 滑轨
72.440 第三输送单元
73.450 暂存控制单元
74.500 出料模块
75.510 第二基板提取单元
76.520 第二开框机构
77.522 第二容置部
78.524 第二开框部
79.530 第四输送单元
80.600 回流模块
81.610 第五输送单元
82.2 基板
83.3 托盘
84.d1 第一方向
85.d2 第二方向
86.d3 第三方向
具体实施方式
87.有关本实用新型的前述及其它技术内容、特点与效果,在以下配合参考附图的较佳实施例的详细说明中,将可清楚地呈现。值得一提的是,以下实施例所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用以说明,而非对本实用新型加以限制。此外,在下列的实施例中,相同或相似的组件将采用相同或相似的标号。
88.以下将配合附图,更进一步地说明本实用新型实施例的垂直框架清洗设备。
89.请参考图1至图2,其中图1为本实用新型的垂直框架清洗设备的实施例的立体示意图,图2为多个托盘的侧视示意图。本实施例的垂直框架清洗设备1例如是通过垂直式固持框架并以湿式及黄光对基板2(可参考图8)进行清洗的设备,包括至少一个框架100(可参考图3)、入料模块200、清洗模块300、暂存模块400以及出料模块500,其中入料模块200用以自垂直框架清洗设备1的上游端接收基板2并装载于框架100上;清洗模块300配置于入料模块200的第一方向d1上,用以对基板2进行清洗及显影等作业程序;暂存模块400配置于清洗模块300的第一方向d1上,用以暂时地存储基板2及框架100并输送至出料模块500;出料模块500配置于暂存模块400的第一方向d1上,用以将清洗及显影完毕的基板2自框架100卸下并输送至下游端进行后续的作业程序。较佳地,垂直框架清洗设备1还包括回流模块600,用以将在出料模块500卸除基板2后的框架100输送回入料模块200以装载下一批基板2。
90.如图2及图8所示,本实施例的基板2呈长方板状,且在运送至垂直框架清洗设备1前装载于托盘3上,运送用的台车或拖车等运送装置会将层叠的基板2以及托盘3运送至垂直框架清洗设备1的入料模块200的入口处,并由垂直框架清洗设备1内部的模块及元件将
基板2自托盘3上取下以进行作业。
91.请参考图3及图4,其中图3为图1的垂直框架清洗设备中的框架的立体示意图,而图4为图3的框架的固持部的立体示意图。本实施例的框架100大致呈长方形,用以装载并固定基板2(可参考图9),且包括架体110以及固持部120,其中固持部120可动地连接于架体110。
92.请参考图5至图9,其中图5为图3的框架自回流模块移动至入料模块的立体示意图,图6为图5中的框架移动至第一开框机构的示意图,图7为图6另一角度的放大示意图,图8为本实施例的入料模块的立体示意图,图9为装载基板的框架即将自入料模块输送至清洗模块的立体示意图。在本实施例中,入料模块200包括第一基板提取单元210、第一开框机构220以及第一输送单元230,当框架100将上一批基板2在出料模块500卸下后,会通过回流模块600的第五输送单元610(图5中未示,可参考图19)朝入料模块200的第一开框机构220移动,且为了减少垂直框架清洗设备1整体占据的体积,回流模块600与第一开框机构220之间具有高度差,而框架100自回流模块600的高度移动至第一开框机构220所在的高度。具体而言,入料模块200还包括第一滑轨250以及第二滑轨260,其中第一滑轨250沿正交于第一方向d1的第二方向d2延伸,而第二滑轨260沿正交于第一方向d1以及第二方向d2的第三方向d3延伸,且第二滑轨260配置于入料模块200以及回流模块600之间。借此,框架100可沿着平行于清洗模块300的回流模块600移动至入料模块200与回流模块600的交界处后,沿着第二滑轨260移动至第一开框机构220的高度,待基板2装配于框架100后,再沿着第一滑轨250移动至第一输送单元230上并朝清洗模块300输送,不仅可使垂直框架清洗设备1的整体体积缩小,且各个模块在处理流程上能同步处理,提高生产的速度。值得一提的是,在其它可能的实施例中,垂直框架清洗设备1也可以不包括回流模块600,而直接由人工或台车等设备在入料模块200处提供空的框架100以供基板2进行装配,本实用新型对此不加以限制。
93.另一方面,第一开框机构220包括第一容置部222以及第一开框部224,其中第一容置部222适于容置框架100,第一开框部224配置于第一容置部222上,且第一开框机构220通过第一开框部224固定框架100并使固持部122相对于架体110开合。详细而言,第一基板提取单元210例如是机械手臂,可通过气吸、磁吸或夹取等方式将基板2提取至预定的目标位置。当框架100如图7所示沿着第二滑轨260下降至第一开框机构220的高度并移动至第一容置部222内部后,第一开框部224将如图7所示沿着相反于第二方向d2的方向移动并与盒体126嵌合并固定框架100,此时电流将由第一开框部224输入固持部120并驱动固持件122相对于架体110旋转一定角度,使框架100形成可容置基板2的状态,此时第一基板提取单元210将如图8所示,将基板2自托盘3上提取并放置于框架100上。当基板2正确配置于框架100用以容置基板2的位置时,第一开框部224将停止输入电流并离开固持部120,此时固持件122会旋转复位,从而让框架100通过固持部120固持基板2以使基板2的法向平行于地面。
94.值得一提的是,由于固持部120驱动固持件122旋转的机构配置于盒体126中,在作业过程中较难以直接确认盒体126内部状况,为了防止盒体126内部的元件有故障的情况发生,第一开框机构220还包括开框传感器226,其中开框传感器226配置于第一开框部224上且电性连接于第一开框部224。当第一开框部224嵌合于盒体126并输入电流时,开框传感器226会侦测第一开框机构220致动固持部120的电流大小,倘若电流值低于设定的阈值,则代表盒体126内部的元件可能有损坏的情况产生,此时维护人员会将框架100取下并确认内部
情况,以维持框架100固持基板2的稳定性。
95.除此以外,为了确保第一基板提取单元210所提取的基板2与框架100之间的配置精度,较佳地,入料模块200还包括影像传感器240,其中影像传感器例如是具有电荷耦合器件(charge
‑
coupled device,ccd)的摄影机,用以侦测第一基板提取单元210与基板2的相对位置。借此,可大幅提高第一基板提取单元210配置基板2时的对位精度。
96.请参考图9至图11,其中图10为本实施例的第一输送单元的立体示意图,而图11为图10的第一输送单元部分元件的前视示意图。当基板2顺利配置于框架100上且由固持部120固持后,第一输送单元230会将装载有基板2的框架100沿第一方向d1朝清洗模块300输送。如图10及图11所示,第一输送单元230包括多个马达231以及多个滚轮232。具体而言,第一输送单元230还包括多个齿轮233以及多个传动轴234,且马达231通过这些齿轮233以及这些传动轴234驱动这些滚轮232。当框架100如图11所示通过盒体126接触滚轮232时,滚轮232会受到马达231的驱动而带动框架100沿着第一方向d1移动(可参考图12)。值得一提的是,这些齿轮233为正齿轮或斜齿轮,传动轴234与齿轮233之间没有链条所造成的寸动现象,滚轮232与盒体126接触的部分还配置了防滑件237,以防止框架100与滚轮232之间产生相对滑动,其中防滑件237例如是平o形环,但本实用新型对此不加以限制,通过上述的配置,框架100的输送速度以及稳定性得以获得提升。
97.除此以外,由于在生产过程中可能需要一次输送多个框架100,为了避免当前方的框架100停留在原地而后方的框架100持续移动造成两者彼此碰撞受损的情况,较佳地,第一输送单元230还包括输送控制单元235以及多个位置传感器236,其中输送控制单元235以及位置传感器236电性连接于马达231。具体而言,这些位置传感器236例如是光学传感器,且分别以等间隔或不等间隔的方式配置于框架100的移动路径上。当这些位置传感器236中的任一位置传感器236侦测到这些框架100中的任一框架100与另一框架的距离小于阈值时,输送控制单元235会发出信号,控制对应于框架100的马达231停止运作,如此一来后方的框架100将不再沿着第一方向d1继续移动(可参考图12),从而防止相异的两框架100彼此撞击。值得一提的是,下文中的第二输送单元330、第三输送单元440、第四输送单元530以及第五输送单元610在传动机构、输送控制单元235、位置传感器236以及防滑件237的配置皆与第一输送单元230相似,因此后文中将不再赘述。
98.请参考图12至图14,其中图12为本实施例的清洗模块一个部分的立体示意图,图13为图12的清洗模块的集液件以及液量传感器的立体示意图,而图14为本实施例的清洗模块另一个部分的立体示意图。如图所示,本实施例的清洗模块300包括出液单元310、干燥单元320以及第二输送单元330,其中第二输送单元330配置于出液单元310以及干燥单元320的底部。详细而言,出液单元310包括多个出液件312,用以对框架100上的基板2进行清洗及显影等作业,而干燥单元320包括多个干燥件322,且出液单元310以及干燥单元320配置于框架100移动路径的两侧,借此可在框架100沿第一方向d1输送的过程中同时对基板2的两侧进行加工。更进一步而言,为了使清洗液以及显影液按照预定的方向均匀地喷洒在基板2的表面上,较佳地,出液件312的一个部分连接于显影液源(图中未示),出液件312的另一个部分连接于清洗液源(图中未示),且清洗模块300还包括摆动机构340,其中摆动机构340例如是转盘或凸轮,沿着第一方向d1以及第三方向d3往复的旋转或摆动,且出液单元310连接于摆动机构340上。借此,通过摆动机构340的往复摆动,出液件312所喷出的显影液以及清
洗液能够均匀的分布在基板2的表面,提高基板2的加工品质。
99.在显影液与基板2表面充分作用后,装载着基板2的框架100需要经过多次的清洗、液切,让基板2表面的显影液浓度降低至预定的标准,且由于本实施例的垂直框架清洗设备1能使基板2的法向平行于地面,因此残留在基板2表面的药水会较容易受到重力的作用而滴落离开基板2,同时让基板2两侧的表面状况维持一致,进一步提高生产良率。
100.另一方面,为了避免自基板2上滴落的药液污染设备,较佳地,清洗模块300的底部配置有集液件360以及至少一个液量传感器370,其中集液件360例如是集液盘,且集液盘上设有开口,当集液件360上的药液量超过一定量以上时,液量传感器370将发出信号,现场维护人员将前来检测排液状况以防止设备受损。
101.当基板2经历过显影以及多次清洗、液切等步骤后,会如图14所示在清洗模块300的后段进行干燥处理。具体而言,干燥件322连接于气源(图中未示),当装载基板2的框架通过干燥件322的中央区域时,干燥件322会将空气以高压高速的方式喷出,借此将最后残留的些许显影液或清洗液自基板2表面移除。为了提高干燥效率,干燥件322所吹出的空气可能是经过升温处理后的热风,为了防止基板2表面带有静电进而影响后续制程,较佳地,清洗模块300还包括静电消除单元350,且静电消除单元350配置于干燥单元320的第一方向d1上,其中静电消除单元350例如是静电消除棒,可通过非接触式的方式移除干燥后的基板2表面所带有的静电。
102.请参考图15及图16,其中图15为本实施例的暂存模块的立体示意图,而图16为图15的暂存模块将框架移动至暂存部的示意图。当基板2完成干燥以及静电消除等步骤后,第二输送单元330会将框架100沿第一方向d1朝暂存模块400输送。如图15及图16所示,暂存模块400包括多个暂存部410、活动部420、滑轨430以及第三输送单元440,其中这些暂存部410沿第二方向d2相邻配置,活动部420滑设于滑轨430上,滑轨430配置于这些暂存部410之间且沿第二方向d2延伸,且第三输送单元440配置于这些暂存部410以及活动部420上。具体而言,由于框架100在出料模块500卸除基板2可能需要较长的作业时间,为了避免框架100因无法朝出料模块500输送而导致自后方清洗模块300运送来的框架100受阻,垂直框架清洗设备1可通过暂存模块400暂时存储框架100。更进一步而言,暂存模块400还包括暂存控制单元450,当完成干燥处理的框架100由清洗模块300输送到暂存模块400时,暂存控制单元450会侦测目前哪一个暂存部410为净空可容纳框架100的状态,并控制活动部420沿着滑轨430滑动至与框架100在第二方向d2上相同的位置,此时第三输送单元440将带动框架100移动至活动部420上,紧接着活动部420会沿着滑轨430移动至与暂存控制单元450侦测到可容纳框架100的暂存部410在第二方向d2上相同的位置,之后活动部420上的第三输送单元440再带动框架100移动至选定的暂存部410进行暂存。如此一来不仅可在有限的空间内存储多个框架,且当出料模块500作业完毕时,在时序上先由清洗模块300移动至暂存模块400的框架100也可优先由暂存部410朝出料模块500移动,而不会受到后进先出的限制。
103.请参考图17至图19,其中图17为图16中的框架自暂存模块移动至出料模块的示意图,图18为本实施例的出料模块的立体示意图,图19为本实施例的回流模块的立体示意图。本实施例的出料模块500包括第二基板提取单元510、第二开框机构520以及第四输送单元530,其中第二基板提取单元510与第一基板提取单元210相似,可为机械手臂,第二开框机构520包括第二容置部522以及第二开框部524,且第二开框机构520的作动原理与第一开框
机构220类似,当装载有基板2的框架100移动至第二容置部522内部时,第二开框部524可与盒体126进行嵌合,固定框架100并使固持部122相对于架体110开合,此时第二基板提取单元510会将框架100上的基板2取下,并堆叠至在出料模块500准备好的托盘3上,完成基板2显影以及清洗的作业。
104.此外,如上文所述,当基板2自框架100上卸除后,第四输送单元530会将空的框架100朝回流模块600输送。在本实施例中,回流模块600连接于入料模块200以及暂存模块400之间且与清洗模块300平行配置,换而言之,回流模块600与清洗模块300共用暂存模块400作为输送及回收框架100的出入口。另一方面,回流模块600包括第五输送单元610,且第五输送单元610适于将框架100沿相反于第一方向d1的方向输送。借此,使用过后的框架100可重新回到入料模块200以接收新的基板2,实现自动生产线上的循环。
105.以上所述仅为本实用新型的实施例,其并非用以局限本实用新型的专利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1