一种PCBA板组装涂胶设备的制作方法
一种pcba板组装涂胶设备
技术领域
1.本实用新型属于pcba板自动装配技术领域,具体涉及一种将pcba板与塑料外壳进行组装的设备。
背景技术:
2.现有的一种pcba板的尾部带有线束,线束中部的电线质地较软,难以实现对pcba板的精确定位。塑料外壳包括塑料上盖和塑料下盖,塑料下盖内部设有凹槽,pcba板对应位置设有通孔,利用螺丝穿过pcba板的通孔伸入塑料下盖的凹槽中从而将pcba板固定在塑料下盖中,然后对pcba板进行涂胶密封。
3.将pcba板放置到塑料下盖,然后将pcba板通过螺钉大致固定在塑料下盖内部,后续对pcba板表面进行涂三防漆,然后对pcba板上的芯片及电容包括引脚进行打胶密封,人工将塑料上盖和塑料下盖进行盖合从而完成pcba板组装。
4.现有的pcba板的组装工序复杂,利用人工组装费时费力,同时产品质量难以统一。对于组装后pcba板后续需要对塑料上盖、塑料下盖的连接处进行焊接,从而使两者成为一个整体,保证二者内部pcba板的密封性。
技术实现要素:
5.本实用新型针对上述技术问题,提供一种pcba板组装涂胶设备,该设备能够实现pcba板与塑料上盖、塑料下盖的组装以及实现组装过程中自动涂胶密封。
6.本实用新型提供的技术方案:一种pcba板组装设备,包括环形输送线,pcba板托盘、塑料下盖托盘、打螺丝机械手、第一涂胶机械手、第二涂胶机械手、塑料上盖供料部沿环形输送线的运动方向依次设置,pcba板托盘设有多个规则分布的pcba板定位槽,塑料下盖托盘设有多个规则分布的下盖定位槽,塑料下盖的内部开有用于容纳pcba板的凹槽,环形输送线上设置输送治具,输送治具随环形输送线运动;打螺丝机械手的一侧设置螺钉供料位,打螺丝机械手的末端安装视觉检测机构,视觉检测机构用于检测pcba板中螺钉孔位置,第一涂胶机械手用于对pcba板进行涂三防漆,第二涂胶机械手用于pcba板上的芯片及电容包括引脚进行打胶密,塑料上盖供料部用于将塑料上盖搬运到输送治具上。
7.进一步的,塑料上盖供料部包括振动理料盘和上料机械手,多个塑料上盖放置在振动理料盘的内部,塑料上盖经振动理料盘作用后卡合端在下统一整列输出,上料机械手从振动理料盘的输出端搬运塑料上盖放置到输送治具中并放置在塑料下盖的正上方。
8.进一步的,还包括超声波塑焊机,超声波塑焊机沿环形输送线的运动方向设置在塑料上盖供料部的下游,超声波塑焊机对组装后的塑料上盖、塑料下盖进行焊接。
9.进一步的,还包括激光打码机,激光打码机沿环形输送线设置在超声波塑焊机的下游,激光打码机用于对焊接后的塑料上盖进行打码。
10.进一步的,还包括下料机械手,下料机械手沿环形输送线设置在激光打码机的下游,下料机械手用于从环形输送线将焊接后的组装成品取下并放置到成品料库中。
11.进一步的,输送治具中开有线束容纳槽和下盖容纳槽,线束容纳槽与下盖容纳槽相交且互呈90度设置,下盖容纳槽为矩形槽,下盖容纳槽与塑料下盖底部为仿形设计,下盖容纳槽的两侧开有用于容纳塑料下盖中双耳的扩容槽,线束容纳槽用于容纳pcba板的尾部线束。
12.有益效果:本设备集成人工将塑料下盖与pcba板组装后放置到环形输送线的输送治具中,然后利用自动打螺丝机械手实现对pcba板与塑料下盖的固定,第一涂胶机械手、第二涂胶机械手自动对pcba板进行涂三防漆、涂胶密封其中引脚、电容等操作,实现自动化生产、提高产品质量。
附图说明
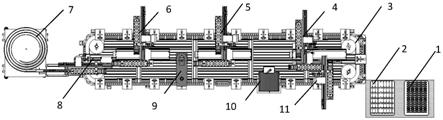
13.图1 为本实用新型的俯视结构示意图。
14.图2 为本实用新型装置中输送治具的立体结构示意图。
15.图3 为本实用新型装置中上料机械手中上盖取料机械手的结构示意图。
16.图中:1.塑料下盖托盘;2.pcba板托盘;3.环形输送线;4.打螺丝机械手;5.第一涂胶机械手;6.第二涂胶机械手;7.振动理料盘;8.上料机械手;8
‑
1.上盖取料抓手;9.超声波塑焊机;10.激光打码机;11.下料机械手;12.输送治具;12
‑
1.线束容纳槽;12
‑
2.下盖容纳槽。
具体实施方式
17.如图1
‑
图3所示,一种pcba板组装涂胶设备包括环形输送线3,pcba板托盘2、塑料下盖托盘1、打螺丝机械手4、第一涂胶机械手5,第二涂胶机械手6、塑料上盖供料部沿环形输送线3的运动方向依次设置,pcba板托盘2设有多个规则分布的的pcba板定位槽,pcba板放置在pcba板定位槽中,塑料下盖托盘1设有多个规则分布的下盖定位槽,塑料下盖放置在下盖定位槽中,本实用新型中的pcba板的尾部具有伸出的线束,线束的质地较软,容易弯曲,不适宜采用机械手进行自动搬运。环形输送线3上设置输送治具12,输送治具12随环形输送线3运动。本设备中,人工从塑料下盖托盘1、pcba板托盘2依次抓取塑料下盖、pcba板放置在输送线的输送治具12中。打螺丝机械手4的一侧设置螺钉供料位,打螺丝机械手4的末端安装视觉检测机构,视觉检测机构随打螺丝机械手4末端运动,视觉检测机构用于检测pcba板上螺钉孔的位置从而确定打钉位置,第一涂胶机械手5包括第一涂胶机械手5和第一涂胶组件,第一涂胶组件安装在第一涂胶机械手5的输出末端,优选的,第一涂胶机械手5采用三自由度直角坐标机械手,第一涂胶机械手5用于对pcba板进行涂三防漆。第二涂胶机械手6包括第二涂胶机器人本体和第二涂胶组件,第二涂胶机器人本体优选为三自由度直角坐标机械手,第二涂胶组件安装在第二涂胶机器人的输出末端,第二涂胶机械手6用于pcba板上的芯片及电容包括引脚进行打胶密。
18.如图2所示,输送治具12中开有线束容纳槽12
‑
1和下盖容纳槽12
‑
2,线束容纳槽12
‑
1与下盖容纳槽12
‑
2相交且互呈90度设置,下盖容纳槽12
‑
2为矩形槽,下盖容纳槽12
‑
2与塑料下盖底部为仿形设计,下盖容纳槽12
‑
2的两侧开有用于容纳塑料下盖中双耳的扩容槽,线束容纳槽12
‑
1用于容纳pcba板的尾部线束。
19.塑料上盖供料部包括振动理料盘7和上料机械手8,多个塑料上盖放置在振动理料
盘7的内部,塑料上盖经振动理料盘7作用后整列输出,振动理料盘7控制塑料上盖的卡合端在下统一输出,上料机械手8从振动理料盘7的输出端搬运塑料上盖放置到输送治具12中并放置在塑料下盖的正上方。
20.如图3所示,上料机械手8包括上料机械手8本体和上盖取料机械手8
‑
1,上盖取料机械手8
‑
1安装在上料机械手8本体的输出端,上盖取料机械手8
‑
1包括手指气缸和两个夹爪,两个夹爪分别安装在手指气缸的两个输出端,上盖机械手本体优选为三自由度直角坐标机械手,上料机械手8带动上盖取料机械手8
‑
1从振动理料盘7的输出端夹取塑料上盖放置到输送治具12中塑料下盖的正上方。
21.为了提高pcba板组装的自动化程度,还包括超声波塑焊机9,超声波塑焊机9沿环形输送线3的运动方向设置在塑料上盖供料部的下游,超声波塑焊机9对组装后的塑料上盖、塑料下盖进行焊接,使得二者焊接固定。
22.为了提高组装的自动化程度,还包括激光打码机10,激光打码机10沿环形输送线3设置在超声波塑焊机9的下游,激光打码机10用于对焊接后的塑料上盖进行打码。
23.为了提高组装的自动化程度,还包括下料机械手11,下料机械手11沿环形输送线3设置在激光打码机10的下游,下料机械手11用于从环形输送线3将焊接后的组装成品取下并放置到成品料库中。
24.上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本实用新型的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1