有面积效率的压摆率受控驱动器的制作方法
有面积效率的压摆率受控驱动器
1.相关申请的交叉引用
2.本专利申请主张于2020年4月24日提交的、发明名称为“area efficient slew-rate controlled driver”的非临时申请no.16/858,343(该申请现在为于2021年3月2日授权的专利no.10,938,381)、并且主张于2020年12月2日提交的、发明名称为“area efficient slew-rate controlled driver”的非临时申请no.17/247,160的优先权,所述申请被转让给其受让人并且通过本文的引用明确并入本文。
技术领域
3.本公开的各方面总体上涉及驱动器,并且更具体地,涉及压摆率(slew-rate)受控的驱动器。
背景技术:
4.驱动器可以用于经由传输线(例如,一个或多个金属迹线、电缆等)将信号(例如,数据信号)从第一装置驱动到第二装置。希望对驱动器的压摆率进行很好的控制,以便使由于反射、电磁干扰(emi)等导致的信号劣化最小化。压摆率被表征为每单位时间的电压的变化。
技术实现要素:
5.下面给出了一个或多个实施方式的简化概要,以便提供对此类实施方式的基本理解。该概要并不是对所有能够设想的实施方式的广泛概述,而且既非意在标识所有实施方式的关键或重要要素,也非意在划定任何或所有实施方式的范围。其唯一目的在于以简化形式呈现一种或多种实施方式的一些概念,以作为下文提供的更加详细的描述的前序。本发明由权利要求限定。未落在权利要求范围内的实施方式和方面仅仅是用于解释本发明的示例。
6.第一方面涉及一种驱动器。该驱动器包括耦合在第一轨和驱动器输出之间的输出晶体管、耦合到输出晶体管的栅极的第一电流源、第二电流源、以及开关,其中开关和第二电流源串联耦合在输出晶体管的栅极和第二轨之间。该驱动器还包括被配置为基于驱动器的输出电流生成感测电流的电流传感器、以及被配置为生成参考电流的参考电流源,其中电流传感器和参考电流源耦合到开关的控制输入。
7.第二方面涉及一种驱动器。该驱动器包括耦合在轨和驱动器输出之间的输出晶体管、耦合到输出晶体管的栅极的第一电流源、以及被配置为从当第二电流源被启用时从输出晶体管的栅极汲取(sink)电流或向输出晶体管的栅极供应电流的第二电流源。该驱动器还包括被配置为感测驱动器的输出电流的电流传感器、以及耦合到电流传感器和第二电流源的控制电路,其中控制电路被配置为:如果感测到的输出电流高于阈值,则启用第二电流源;如果感测到的输出电流低于阈值,则禁用第二电流源。
8.第三方面涉及一种用于驱动器的压摆率控制方法。驱动器包括耦合在轨和驱动器
的输出之间的输出晶体管。该方法包括使用第一电流源以预驱动电流预驱动输出晶体管的栅极,以及感测驱动器的输出电流。该方法还包括如果感测到的输出电流高于阈值,则启用第二电流源,第二电流源为输出晶体管的栅极提供附加的预驱动电流,如果感测到的输出电流低于阈值,则禁用第二电流源。
附图说明
9.图1a示出了根据本公开的某些方面的用以控制驱动器压摆率的具有电容性反馈的驱动器的示例。
10.图1b示出了根据本公开的某些方面的针对驱动器输出被驱动为高的情况的图1a的驱动器的等效电路。
11.图1c示出了根据本公开的某些方面的针对驱动器输出被驱动为低的情况的图1a的驱动器的等效电路。
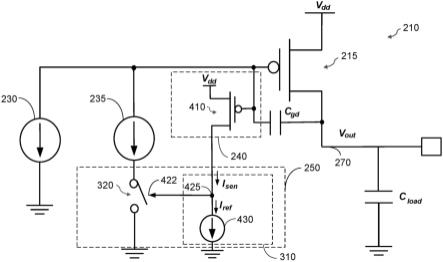
12.图2示出了根据本公开的某些方面的压摆率受控的驱动器的示例。
13.图3示出了根据本公开的某些方面的控制电路的示例性实施方式。
14.图4示出了根据本公开的某些方面的电流传感器和开关控制器的示例性实施方式。
15.图5示出了根据本公开的某些方面的电流源和开关的示例性实施方式。
16.图6a示出了根据本公开的某些方面的针对驱动器正在驱动小的电容性负载的情况的示例性时序图。
17.图6b示出了根据本公开的某些方面的针对驱动器正在驱动大的电容性负载的情况的示例性时序图。
18.图7示出了根据本公开的某些方面的压摆率受控的驱动器的另一示例。
19.图8示出了根据本公开的某些方面的控制电路的另一示例性实施方式。
20.图9示出了根据本公开的某些方面的电流传感器和开关控制器的另一示例性实施方式。
21.图10示出了根据本公开的某些方面的电流源和开关的另一示例性实施方式。
22.图11示出了根据本公开的某些方面的被配置为基于输入电压将驱动器输出拉高或拉低的压摆率受控的驱动器的示例。
23.图12示出了根据本公开的某些方面的被配置为驱动传输线的驱动器的示例。
24.图13是示出了根据本公开的某些方面的压摆率控制方法的流程图。。
具体实施方式
25.下文结合附图阐述了详细描述,意在作为各种配置的描述而并非要意在表示可以实践本文所述的概念的仅有配置。详细描述包括具体细节,目的是提供对各种概念的透彻理解。然而,对本领域技术人员将显而易见的是,可以在没有这些具体细节的情况下实践这些概念。在一些情况下,以框图形式示出了公知的结构和部件,以避免使这样的概念模糊不清。
26.图1a示出了使用电容性反馈实现压摆率控制的驱动器110的示例。驱动器110可以用于经由传输线(例如,一个或多个金属迹线、电缆等)将信号(例如,数据信号)从第一装置
驱动到第二装置。第一装置和第二装置可以位于单独的芯片上(例如,用于芯片到芯片通信)。在图1a中,耦合到驱动器110的输出170的电容性负载由负载电容器c
load
表示。负载电容可以包括耦合到驱动器110的输出170的传输线(未示出)的电容、将输出170耦合到传输线的焊盘180的电容,等等。
27.驱动器110包括输出级112、反馈电容器cm、第一电流源130、第二电流源135、第一开关140、第二开关145、第三开关150、第四开关155、第五开关160和第六开关165。输出级112包括第一输出晶体管115和第二输出晶体管120。如下文进一步所述,反馈电容器cm(也称为米勒电容器(miller capacitor))用于形成电容性反馈环路,其控制驱动器110的压摆率大约独立于负载电容c
load
的变化。
28.第一输出晶体管115用耦合在驱动器110的输出170和电压供应轨v
dd
之间的p型场效应晶体管(pfet)实现,并且第二输出晶体管120用耦合在驱动器110的输出170和接地轨(ground rail)之间的n型场效应晶体管(nfet)实现。第一输出晶体管115用于将输出170驱动为高(即,对输出170进行上拉),并且第二输出晶体管120用于将输出170驱动为低(即,对输出170进行下拉),如下文进一步所述的。在附图中,接地轨由接地符号表示。
29.第一电流源130被配置为将电流汲取到接地轨。如下文进一步所述,第一电流源130用于将第一输出晶体管115的栅极预驱动为低,以便将驱动器110的输出170驱动为高。第二电流源135被配置为从电压供应轨v
dd
吸收电流。如下文进一步所述,第二电流源135用于将第二输出晶体管120的栅极预驱动为高,以便将驱动器110的输出170驱动为低。
30.第一开关140耦合在第一电流源130和第一输出晶体管115的栅极之间,并且第二开关145耦合在第二电流源135和第二输出晶体管120的栅极之间。第三开关150耦合在反馈电容器cm和第一输出晶体管115的栅极之间,并且第四开关155耦合在反馈电容器cm和第二输出晶体管120的栅极之间。第五开关160耦合在电压供应轨v
dd
和第一输出晶体管115的栅极之间,并且第六开关165耦合在第二输出晶体管120的栅极和接地轨之间。第一开关140、第二开关145、第三开关150、第四开关155、第五开关160和第六开关165的闭合/断开状态受到输入到驱动器110的输入168的输入电压(被标记为“v
in”)的控制,如下文进一步所述的。
31.驱动器110被配置为基于驱动器110的输入168处的输入电压将输出170驱动为高或低。更具体地,驱动器110在输入电压具有第一逻辑值时,将输出170驱动为高,并且在输入电压具有第二逻辑值时,将输出170驱动为低。第一逻辑值可以是低(例如,大致为接地(ground)),并且第二逻辑值可以是高(例如,大致为v
dd
),或者反之亦然。
32.当输入电压具有第一逻辑值时,第五开关160断开(即,截止),并且第六开关165闭合(即,导通)。结果,第二输出晶体管120的栅极通过第六开关165耦合到接地轨,这样禁用(即,截止)了第二输出晶体管120。另外,第一开关140闭合(即,导通),第二开关145断开(即,截止)。结果,第一电流源130耦合到第一输出晶体管115的栅极,允许第一电流源130将电流从第一输出晶体管115的栅极汲取到接地,如下文进一步所述的。另外,第三开关150闭合(即,导通),第四开关155断开(即,截止)。结果,反馈电容器cm耦合在驱动器110的输出170和第一输出晶体管115的栅极之间。图1b示出了针对输入电压具有第一逻辑值的情况的驱动器110的等效电路。
33.在这种情况下,第一电流源130将电流从第一输出晶体管115的栅极汲取到接地,这将第一输出晶体管115的栅极预驱动为低(即,降低第一输出晶体管115的栅极电压)。由
于第一输出晶体管115是用peft实现的,这使第一输出晶体管115导通,允许电流从电压供应轨v
dd
通过第一输出晶体管115流到驱动器110的输出170。驱动器110的输出电流对负载电容c
load
充电,使输出电压(被标记为“v
out”)倾斜上升(ramp up)(即,从低转变为高)。
34.在输出170从低转变为高期间,反馈电容器cm形成控制驱动器110的压摆率的电容性反馈环路。对于第一阶,反馈环路将驱动器110的压摆率设置为大约如下值:
[0035][0036]
其中is是第一电流源130的电流,并且等式(1)中的cm是反馈电容器cm的电容。因此,压摆率由第一电流源130的电流和反馈电容器cm的电容设置,这两者都与输出170处的电容性负载c
load
无关。因此,由反馈电容器cm提供的电容性反馈允许将驱动器110的压摆率设置为期望压摆率,该期望压摆率大约独立于电容性负载c
load
。
[0037]
当输入电压具有第二逻辑值时,第五开关160闭合(即,导通),并且第六开关165断开(即,截止)。结果,第一输出晶体管115的栅极通过第五开关160耦合到电压供应轨v
dd
,这禁用(即,截止)了第一输出晶体管115。另外,第一开关140断开(即,截止),并且第二开关145闭合(即,导通)。结果,第二电流源135耦合到第二输出晶体管120的栅极,允许第二电流源135向第二输出晶体管120的栅极提供电流,如下文进一步所述的。另外,第三开关150断开(即,截止),并且第四开关155闭合(即,导通)。结果,反馈电容器cm耦合在驱动器110的输出170和第二输出晶体管120的栅极之间。图1c示出了针对输入电压具有第二逻辑值的情况的驱动器110的等效电路。
[0038]
在这种情况下,第二电流源135向第二输出晶体管120的栅极供应电流,这将第二输出晶体管120的栅极预驱动为高(即,提高第二输出晶体管120的栅极电压)。由于第二输出晶体管120是用nfet实现的,这使第二输出晶体管120导通,允许电流从驱动器110的输出170通过第二输出晶体管120流到接地轨。这负载电容c
load
放电,导致输出电压(标记为“v
out”)倾斜下降(即,从高转变为低)。在输出170从高转变到低期间,反馈电容器cm形成反馈环路,该反馈环路大约独立于负载电容(例如,根据上述等式(1))设置驱动器110的压摆率。
[0039]
因此,反馈电容器cm形成电容性反馈环路,该电容性反馈环路允许独立于负载电容c
load
的变化(例如,由于耦合到输出170的传输线的长度的变化)来设置驱动器110的压摆率。例如,可以通过根据期望压摆率(例如,基于等式(1))来设置预驱动电流is和/或反馈电容器cm的电容,来设置驱动器110的压摆率。在本示例中,预驱动电流is是当输出170从低转变到高时第一电流源130的电流,并且预驱动电流is是当输出170从高转变到低时第二电流源135的电流。如本文所使用的,“预驱动电流”是指驱动输出晶体管(例如,第一输出晶体管115或第二输出晶体管120)的栅极的电流。
[0040]
使用电容性反馈来控制驱动器压摆率的难点在于,电容性反馈可能需要反馈电容器cm具有大电容,以便提供足够的环路增益,以实现良好的压摆率控制。大的反馈电容可能需要反馈电容器cm具有大的尺寸,这可能占用芯片的很大面积。对于具有低电容密度的芯片而言,尤其可能是这种情况,这增大了针对给定电容的芯片上电容器的尺寸。因此,希望有一种更有面积效率的用于控制驱动器压摆率的方式。
[0041]
另外,使用大的反馈电容器cm来提供足够大的回路增益以实现良好的压摆率控制可能增大驱动器110的功耗。通过观察等式(1)可以看出这一点。在等式(1)中,驱动器110的压摆率大约等于预驱动电流is除以反馈电容器cm的电容。因此,使反馈电容器cm的电容更大以增大回路增益需要使预驱动电流is更大,以便实现驱动器110期望的压摆率。更大的预驱动电流is可以增大驱动器110的功耗。因此,希望有一种更有功率效率的用于控制驱动器压摆率的方式。
[0042]
本公开的各方面提供了对驱动器的压摆率控制而无需大的反馈电容器cm,减小了驱动器的芯片面积和/或功耗,如下文进一步所述的。在某些方面中,通过感测驱动器的输出电流以间接检测驱动器输出处的负载电容,并且当检测到大的负载时启用附加的预驱动电流,从而实现压摆率控制。这样在负载电容的范围内减小了驱动器压摆率的变化(即,转变时间),如下文进一步所述的。
[0043]
图2示出了根据本公开各方面的示例性压摆率受控的驱动器210。驱动器210被配置为将输出270驱动到高(即,上拉输出270)。下文参考图7论述被配置为将输出驱动到低的示例性压摆率受控的驱动器。
[0044]
驱动器210包括输出晶体管215和第一电流源230。输出晶体管215是用耦合在电压供应轨v
dd
和驱动器210的输出270之间的pfet实现的。更具体地,输出晶体管215的源极耦合到电压供应轨v
dd
,并且输出晶体管215的漏极耦合到输出270。电压供应轨v
dd
从电压源(未示出)提供源电压v
dd
,并且可以包括耦合到电压源的一个或多个金属轨。电压源可以包括开关式电压调节器、线性电压调节器、功率管理集成电路(pmic)、电池等。第一电流源230耦合到输出晶体管215的栅极,并且被配置为从输出晶体管215的栅极汲取电流,以将输出晶体管215的栅极预驱动为低。
[0045]
驱动器210还包括第二电流源235、电流传感器240和控制电路250。第二电流源235被控制电路250选择性地启用或禁用,如下文进一步所述的。当被控制电路250启用时,第二电流源235被配置为将电流从输出晶体管215的栅极汲取到接地。在某些方面中,当在输出270处检测到大的电容性负载时,控制电路250使得第二电流源235能够提供附件的预驱动电流,如下文进一步所述的。
[0046]
电流传感器240被配置为感测驱动器210的输出电流。在本示例中,输出电流是指通过输出晶体管215流到驱动器210的输出270的电流。由电流传感器240提供的感测到的输出电流允许控制电路250检测输出270处的大的负载电容c
load
。这是因为更大的负载电容c
load
增大了驱动器210的输出电流,因为需要更多的电流来对更大的负载电容c
load
充电。因此,感测到的输出电流提供关于负载电容c
load
的信息,允许控制电路250基于感测到的输出电流间接检测大的负载电容c
load
。
[0047]
控制电路250耦合到电流传感器240和第二电流源235。在一个示例中,控制电路250被配置为:如果来自电流传感器240的感测输出电流高于阈值,则启用第二电流源235。在这种情况下,高于阈值的感测输出电流可以指示耦合到输出270的大的负载电容c
load
。因此,在本示例中,当基于感测到的输出电流而检测到大的负载电容c
load
时,启用第二电流源235。控制电路250被配置为:如果来自电流传感器240的感测到的输出电流低于阈值,则禁用第二电流源235。
[0048]
现在将论述根据某些方面的针对驱动器210将输出270从低转变到高的情况的驱
动器210的示例性操作。在这种情况下,假设输出晶体管215的栅极最初为高(例如,大约为v
dd
),并且输出270最初为低(例如,大约为接地)。例如,通过闭合在输出晶体管215的栅极和电压供应轨v
dd
之间的开关(未示出),然后在从低转变到高之前断开开关,可以最初将输出晶体管215的栅极设置为高。例如,通过被配置为将输出270驱动为低的另一驱动器,最初可以将输出270设置为低。
[0049]
为了使输出270从低转变为高,第一电流源230将电流从输出晶体管215的栅极汲取到接地,这将输出晶体管215的栅极预驱动为低。由于输出晶体管215是用peft实现的,这使输出晶体管215导通,允许电流从电压源轨v
dd
通过输出晶体管215流到驱动器210的输出270。驱动器210的输出电流对负载电容c
load
充电,使输出电压(被标记为“v
out”)倾斜上升。
[0050]
在从低转变为高期间,电流传感器240感测驱动器210的输出电流,并且向控制电路250传送感测到的输出电流。如上所述,感测到的输出电流提供关于耦合到输出270的负载电容c
load
的信息。
[0051]
当感测到的输出电流低于阈值时,控制电路250禁用第二电流源235,在这种情况下,第二电流源235不提供附加的预驱动电流。例如,如果小的负载电容c
load
耦合到驱动器210的输出270,则感测到的输出电流可以在从低到高的整个转变期间保持低于阈值。在这种情况下,第二电流源235不提供任何附加的预驱动电流。
[0052]
当感测到的输出电流升高到高于阈值时,控制电路250启用第二电流源235以提供附加的预驱动电流。例如,当大的负载电容c
load
耦合到输出270时,可能发生这种情况。附加的预驱动电流将输出晶体管215的栅极电压拉得更低,这增大了输出电流以对大的负载电容c
load
充电,并使输出电压v
out
更快地倾斜上升。
[0053]
为大的负载电容c
load
提供附加的预驱动电流减小了在整个负载电容范围内(across a range of load capacitances)的驱动器210的压摆率变化。这是因为,在没有附加的预驱动电流的情况下,与驱动器210用于小的负载电容c
load
的压摆率相比,大的负载电容c
load
会显著减小驱动器210的压摆率。针对大的负载电容c
load
提供附加的预驱动电流以预驱动输出晶体管215的栅极减小或消除了大的负载电容c
load
导致的压摆率减小,在整个负载电容范围内获得了更均匀的压摆率。
[0054]
因此,电流传感器240、控制电路250和第二电流源235为驱动器210提供了压摆率控制而无需大的反馈电容器cm。这样可以减小驱动器210的面积,因为电流传感器240、控制电路250和第二电流源235可以占据比大反馈电容器cm更小的面积,尤其是对于芯片具有小电容密度的情况。而且,消除对大反馈电容器cm的需求可以降低功耗。如上所述,大的反馈电容器cm可能需要大的预驱动电流来基于等式(1)实现期望的压摆率。在没有大反馈电容器cm的情况下,驱动器210能够使用更小的预驱动电流实现期望的压摆率,获得更有功率效率的驱动器。
[0055]
应当认识到,驱动器210不限于两个电流源,可以包括多于两个电流源。例如,在一些实施方式中,驱动器210可以包括被配置为基于感测到的输出电流来为输出晶体管选择性提供附加的预驱动电流的多个电流源。在这些实施方式中,多个电流源中的每个电流源可以具有相应的阈值。对于多个电流源中的每个电流源而言,控制电路250可以被配置为:如果感测到的输出电流高于相应阈值,则启用电流源;如果感测到的输出电流低于相应阈值,则禁用电流源。用于多个电流源的阈值可以相同或不同。
[0056]
在一些实施方式中,如果感测到的输出电流等于阈值,则控制电路250可以启用第二电流源235,并且在其他实施方式中,如果感测到的输出电流等于阈值,则控制电路250可以禁用第二电流源235。
[0057]
图3示出了根据某些方面的控制电路250的示例性实施方式。在本示例中,控制电路250包括开关320和开关控制器310。开关320可以用晶体管或另一种类型的开关实现。开关320与第二电流源235串联耦合。在图3所示的示例中,开关320耦合在第二电流源235和接地轨之间。然而,应当认识到,在其他实施方式中,开关320可以耦合在第二电流源235和输出晶体管215的栅极之间,并且第二电流源235可以耦合在开关320和接地轨之间。将开关320与第二电流源235串联耦合允许开关控制器310通过断开或闭合开关320而启用或禁用第二电流源,如下文进一步所述的。
[0058]
开关控制器310被配置为通过基于来自电流传感器240的感测到的输出电流来断开或闭合开关320而启用或禁用第二电流源235。在一个示例中,开关控制器310被配置为:如果感测到的输出电流高于阈值,则闭合开关320。在这种情况下,闭合开关320通过将第二电流源235耦合到接地轨而启用第二电流源235,允许第二电流源235将电流从输出晶体管215的栅极汲取到接地轨。开关控制器310被配置为:如果感测到的输出电流低于阈值则断开开关320。在这种情况下,断开开关320通过使第二电流源235从接地轨解耦而禁用第二电流源235。
[0059]
图4示出了根据某些方面的电流传感器240和开关控制器310的示例性实施方式。在本示例中,电流传感器240包括电流感测晶体管410。在图4的示例中,电流感测晶体管410用pfet实现。电流感测晶体管410的栅极耦合到输出晶体管215的栅极,电流感测晶体管410的源极耦合到电压供应轨vdd,并且电流感测晶体管410的漏极耦合到开关控制器310。电流感测晶体管410的栅极经由输出晶体管215的栅极到漏极电容而电容性耦合到输出晶体管215的漏极。输出晶体管215的栅极到漏极电容在图4中表示为电容器c
gd
。应当认识到,输出晶体管215的栅极到漏极电容来自输出晶体管215的结构而非来自耦合到输出晶体管215的单独的电容器。
[0060]
在本示例中,电流感测晶体管410与输出晶体管215形成电流镜,使电流感测晶体管410生成与驱动器210的输出电流成正比的感测电流i
sen
。因为感测电流与驱动器210的输出电流i
sen
成正比,所以感测电流i
sen
为开关控制器310提供关于驱动器210的输出电流的信息。在本示例中,感测电流i
sen
提供上述的感测到的输出电流。在某些方面中,感测电流i
sen
是输出电流的缩小版本(scaled-down version),这可以通过使电流感测晶体管410的沟道宽度小于输出晶体管215的沟道宽度更小来实现。
[0061]
在本示例中,开关控制器310包括被配置为生成参考电流i
ref
的参考电流源430。如下文进一步所述的,可以由参考电流i
ref
设置上述的开关控制器310的阈值。电流感测晶体管410和参考电流源430耦合在节点425处。在图4的示例中,电流感测晶体管410的漏极耦合到节点425。节点425还耦合到开关320的控制输入422。在本示例中,开关320可以被配置为在控制输入422处的电压等于或高于开关触发电压时闭合,并且在控制输入422处的电压低于开关触发电压时断开。对于用晶体管来实现开关320的示例,控制输入422位于晶体管的栅极处,并且开关触发电压可以是晶体管的阈值电压的函数。在图4的示例中,开关320的控制输入422耦合到参考电流源430和电流传感器240(例如,电流感测晶体管410的漏极)。
[0062]
在输出270从低转变为高期间,电流感测晶体管410生成感测电流i
sen
,感测电流i
sen
与驱动器210的输出电流成正比。感测电流i
sen
与节点425处的参考电流i
ref
被进行比较。如果感测电流i
sen
小于参考电流i
ref
,则参考电流i
ref
可以保持节点425处的电压低于开关触发电压。在这种情况下,开关320断开,并且第二电流源235被禁用。如果感测电流i
sen
大于参考电流i
ref
,则感测电流i
sen
可以对节点425处的电容(未示出)充电,使节点425处的电压升高到高于开关触发电压。在这种情况下,开关320闭合,并且第二电流源235被启用。节点425处的电容可以包括在开关320的控制输入422处的电容和/或另一电容。因此,在本示例中,如果感测电流i
sen
大于参考电流i
ref
,则开关控制器310启用第二电流源235,并且如果感测电流i
sen
小于参考电流i
ref
,则禁用开关控制器310第二电流源235。在本示例中,可以通过根据期望阈值设置参考电流i
ref
来将开关控制器310的阈值设置到期望阈值。
[0063]
应当认识到,开关控制器310不限于图4中所示的示例性实施方式。例如,在另一实施方式中,开关控制器310可以包括耦合在节点425和接地轨之间的感测电阻器。在本示例中,感测电阻器可以将感测电流i
sen
转换成节点425处的感测电压,当感测电压达到上述的开关触发电压时,这使开关320闭合(并且因此启用第二电流源235)。在本示例中,可以通过根据期望阈值设置感电阻器的电阻来设置控制电路250的阈值。
[0064]
图5示出了根据某些方面的参考电流源430、开关320、第一电流源230和第二电流源235的示例性实施方式。
[0065]
在本示例中,参考电流源430用参考电流晶体管520实现,其中参考电流晶体管510的栅极被栅极电压偏压(标记为“v
bias”)偏置。在图5所示的示例中,参考电流晶体管510用nfet实现,其中参考电流晶体管510的漏极耦合到节点425(例如,电流感测晶体管410的漏极),并且参考电流晶体管510的源极耦合到接地轨。在本示例中,参考电流i
ref
由栅极电压偏压v
bias
和参考电流晶体管510的沟道宽度进行设置。
[0066]
在本示例中,第一电流源230用第一电流源晶体管530实现,并且第二电流源235用第二电流源晶体管540实现。在图5所示的示例中,第一电流源晶体管530和第二电流源晶体管540均用nfet实现。第一电流源晶体管530的栅极和第二电流源晶体管540的栅极可以都由电压偏置v
bias
进行偏置,如图5所示。在本示例中,第一电流源晶体管530的电流和第二电流源晶体管540的电流可以独立设置,例如,通过独立地设置第一电流源晶体管530的沟道宽度和第二电流源晶体管540的沟道宽度。
[0067]
在图5的示例中,参考电流晶体管510、第一电流源晶体管530和第二电流源晶体管540的栅极被公共栅极电压偏置v
bias
进行偏置。然而,应当认识到,本公开不限于本示例,在其他实施方式中,参考电流晶体管510、第一电流源晶体管530和第二电流源晶体管540的栅极可以由不同偏置电压进行偏置。
[0068]
在本示例中,开关320用开关晶体管520实现。开关晶体管520的栅极耦合到节点425并且提供开关320的控制输入422。在图5的示例中,开关晶体管520用nfet实现,其中开关晶体管520的漏极耦合到输出晶体管215的栅极,并且开关晶体管520的源极耦合到第二电流源235。在本示例中,开关320的开关触发电压对应于控制输入422处的电压,在该电压下,开关晶体管520的栅极到源极电压等于或大于开关晶体管520的阈值电压。
[0069]
在图5的示例中,相对于图3和图4中开关320和第二电流源235的位置切换开关320和第二电流源235的位置。在两种情况下,开关320和第二电流源235串联耦合在晶体管215
的栅极和接地轨之间,其中当开关320闭合时启用第二电流源235,并且当开关320断开时禁用第二电流源。
[0070]
图6a是时序图,其示出了对于将小的电容性负载c
load
耦合到输出270的情况,在从低转变为高期间,栅极电压(被标记为“v
gate”)、输出电压v
out
、输出电流(被标记为“i
out”)和开关320的控制输入422处的电压(被标记为“v
sw_en”)的示例。在转变开始时,第一电流源230的预驱动电流导致输出晶体管215的栅极电压v
gate
倾斜下降。最后,输出晶体管215(用pfet实现)导通,输出电流i
out
开始从驱动器210的输出270流到负载电容c
load
,导致输出电压v
out
倾斜上升。输出晶体管215的栅极到漏极电容c
gd
提供的电容性反馈然后导致输出电压v
out
以大约is/c
gd
的压摆率(例如,基于等式(1))倾斜上升615。在这一时间期间,电容性反馈将栅极电压v
gate
保持在大约常数电压610处,导致大约为is/c
gd
的压摆率。而且,在这个时间期间,输出电流i
out
处于大约常数电流水平620处。在本示例中,输出电流i
out
低于感测到的输出电流导致控制电路250启用第二电流源235所需的电流水平630。换言之,检测到的负载电容过小,在本示例中无法启用来自第二电流源的附加的预驱动电流。
[0071]
图6b是时序图,示出了对于将大电容性负载c
load
耦合到输出270的情况下,在从低转变为高期间,栅极电压(被标记为“v
gate”)、输出电压v
out
、输出电流(被标记为“i
out”)和开关320的控制输入422处的电压(被标记为“v
sw_en”)的示例。在转变开始处,第一电流源230的预驱动电流使输出晶体管215的栅极电压v
gate
倾斜下降。最后,输出晶体管215(用pfet实现)导通,输出电流i
out
开始从驱动器210的输出270流到负载电容c
load
,使输出电压v
out
倾斜上升。
[0072]
在本示例中,栅极到漏极电容c
gd
的电容过小,以至于无法提供足够大的回路增益来针对大的电容性负载来控制驱动器210的压摆率。结果,输出电压v
out
最初以比图6a所示的小电容性负载低得多的速率倾斜上升615。
[0073]
在本示例中,输出电流i
out
升高到高于感测到的输出电流使控制电路250启用第二电流源235所需的电流水平630。换言之,检测到的负载电容大到足以启用来自第二电流源235的附加的预驱动电流。来自第二电流源235的附加的预驱动电流将输出晶体管215的栅极电压v
gate
下拉到更低的电压640,这将输出电流i
out
升高到更高的电流水平660,并且导致输出电压v
out
以更快速率(例如,与针对图6a中的小电容性负载的情况的速率相当的速率)倾斜上升。结果,大的电容性负载的压摆率类似于图6a中的小的电容性负载的压摆率。在没有附加的预驱动电流的情况下,针对大的电容性负载的压摆率会显著慢于针对图6a中的小的电容性负载的压摆率。因此,来自第二电流源235的附加的预驱动电流为大的电容性负载的情况提供了压摆率控制而无需大的反馈电容器cm。
[0074]
图7示出了根据本公开各方面的另一示例性压摆率受控的驱动器710。驱动器710被配置为将输出770驱动到低(即,下拉输出770)。
[0075]
驱动器710包括输出晶体管715和第一电流源730。输出晶体管715用耦合在驱动器710的输出770和接地轨之间的nfet实现。更具体地,输出晶体管715的漏极耦合到输出770,并且输出晶体管715的源极耦合到接地轨。如上所述,在附图中,接地轨由接地符号表示。第一电流源730耦合到输出晶体管215的栅极,并且被配置为从电压供应轨v
dd
向输出晶体管715的栅极供应电流,以将输出晶体管715的栅极预驱动为高。
[0076]
驱动器710还包括第二电流源735、电流传感器740和控制电路750。第二电流源735
被控制电路750选择性地启用或禁用,如下文进一步所述的。当被控制电路750启用时,第二电流源735被配置为向输出晶体管715的栅极供应电流。在某些方面中,当在输出770处检测到大的电容性负载时,控制电路750使得第二电流源735能够提供附加的预驱动电流,如下文进一步所述的。
[0077]
电流传感器740被配置为感测驱动器710的输出电流。在本示例中,输出电流是指通过输出晶体管715流到接地的电流。由电流传感器740提供的感测到的输出电流允许控制电路750检测输出770处的大的负载电容c
load
。这是因为更大的负载电容c
load
增大了驱动器710的输出电流,因为从更大的负载电容c
load
释放了更多电流。因此,感测到的输出电流提供关于负载电容c
load
的信息,允许控制电路750基于感测到的输出电流间接检测大的负载电容c
load
。
[0078]
控制电路750耦合到电流传感器740和第二电流源735。在一个示例中,控制电路750被配置为:如果来自电流传感器740的感测到的输出电流高于阈值,则启用第二电流源735。在这种情况下,高于阈值的感测到的输出电流可以指示耦合到输出770的大的负载电容c
load
。因此,在本示例中,当基于感测输出电流检测到大的负载电容c
load
时,启用第二电流源735。控制电路750被配置为:如果来自电流传感器740的感测输出电流低于阈值,则禁用第二电流源735。
[0079]
现在将论述根据某些方面的针对驱动器710将输出770从高转变到低的情况的驱动器710的示例性操作。在这种情况下,假设输出晶体管715的栅极最初为低(例如,大约为接地),输出770最初为高(例如,大约为v
dd
)。例如,通过闭合在输出晶体管215的栅极和接地轨之间的开关(未示出),然后在从高转变到低之前断开开关,可以最初将输出晶体管715的栅极设置为低。例如,通过图2中所示的示例性驱动器210,可以将输出770最初设置为高。
[0080]
为了使输出770从高转变为低,第一电流源730向输出晶体管715的栅极供应电流,这样将输出晶体管715的栅极预驱动为高。由于输出晶体管715是用nfet实现的,这使输出晶体管715导通,允许电流从驱动器710的输出770通过输出晶体管715流到接地轨。通过输出晶体管715流到接地的电流使负载电容c
load
放电,导致输出电压(被标记为“v
out”)倾斜下降。
[0081]
在从高转变为低期间,电流传感器740感测驱动器710的输出电流,并且向控制电路750传送感测到的输出电流。在本示例中,输出电流从输出770流到接地以将输出770拉低。
[0082]
当感测到的输出电流低于阈值时,控制电路750禁用第二电流源735,在这种情况下,第二电流源735不提供附加的预驱动电流。
[0083]
当感测到的输出电流升高到高于阈值时,控制电路750启用第二电流源735以提供附加的预驱动电流。例如,当大的负载电容c
load
耦合到输出770时,可能发生这种情况。附加的预驱动电流将输出晶体管715的栅极电压提升得更高,这增大了通过输出晶体管715流动的电流以使大的负载电容c
load
放电,并导致输出电压v
out
更快地倾斜下降。
[0084]
为大的负载电容c
load
提供附加的预驱动电流减小了在整个负载电容范围内的驱动器710的压摆率变化。这是因为,在没有附加的预驱动电流的情况下,与驱动器710用于小的负载电容c
load
的压摆率相比,大的负载电容c
load
会显著减小驱动器710的压摆率。针对大的负载电容c
load
提供附加的预驱动电流以预驱动输出晶体管715的栅极减小或消除了大的
负载电容c
load
导致的压摆率减小,在整个负载电容范围内获得了更均匀的压摆率。
[0085]
因此,电流传感器740、控制电路750和第二电流源735为驱动器710提供了压摆率控制而无需大的反馈电容器cm。这可以减小驱动器710的面积,因为电流传感器740、控制电路750和第二电流源735可以占据比大的反馈电容器cm更小的面积,尤其是对于芯片具有小电容密度的情况。而且,消除对大的反馈电容器cm的需求可以降低功耗。如上所述,大的反馈电容器cm可能需要大的预驱动电流来基于等式(1)实现期望的压摆率。在没有大反馈电容器cm的情况下,驱动器710能够使用更小的预驱动电流实现期望的压摆率,获得更有功率效率的驱动器。
[0086]
应当认识到,驱动器710不限于两个电流源,并且可以包括多于两个电流源。例如,在一些实施方式中,驱动器710可以包括多个电流源,该多个电流源被配置为基于感测到的输出电流来为输出晶体管715选择性地提供附加的预驱动电流。在这些实施方式中,多个电流源中的每个电流源可以具有相应的阈值。对于多个电流源中的每个电流源而言,控制电路750可以被配置为:如果感测到的输出电流高于相应阈值,则启用电流源;如果感测到的输出电流低于相应阈值,则禁用电流源。用于多个电流源的阈值可以相同或不同。
[0087]
在一些实施方式中,如果感测到的输出电流等于阈值,则控制电路750可以启用第二电流源735,并且在其他实施方式中,如果感测到的输出电流等于阈值,则控制电路750可以禁用第二电流源735。
[0088]
图8示出了根据某些方面的控制电路750的示例性实施方式。在本示例中,控制电路750包括开关820和开关控制器810。开关820可以用晶体管或另一种类型的开关实现。开关820与第二电流源735串联耦合。在图8所示的示例中,开关820耦合在第二电流源835和电压供应轨v
dd
之间。然而,应当认识到,在其他实施方式中,开关820可以耦合在第二电流源735和输出晶体管715的栅极之间,并且第二电流源735可以耦合在电压供应轨v
dd
和开关820之间。
[0089]
开关控制器810被配置为基于来自电流传感器740的感测到的输出电流、通过断开或闭合开关720,而启用或禁用第二电流源735。在一个示例中,开关控制器810被配置为:如果感测到的输出电流高于阈值,则闭合开关820。在这种情况下,闭合开关820通过将第二电流源735耦合到电压供应轨v
dd
,而启用第二电流源735,允许第二电流源735从电压供应轨v
dd
向输出晶体管715的栅极供应电流。开关控制器810被配置为:如果感测到的输出电流低于阈值,则断开开关820。在这种情况下,断开开关820通过使第二电流源735从电压供应轨v
dd
解耦,而禁用第二电流源735。
[0090]
图9示出了根据某些方面的电流传感器740和开关控制器810的示例性实施方式。在本示例中,电流传感器740包括电流感测晶体管910。在图9的示例中,电流感测晶体管910用nfet实现。电流感测晶体管910的栅极耦合到输出晶体管715的栅极,电流感测晶体管910的源极耦合到接地轨,并且电流感测晶体管910的漏极耦合到开关控制器810。电流感测晶体管910的栅极经由输出晶体管715的栅极到漏极电容而电容性耦合到输出晶体管715的漏极。输出晶体管715的栅极到漏极电容在图9中表示为电容器c
gd
。应当认识到,输出晶体管715的栅极到漏极电容来自输出晶体管715的结构而非来自耦合到输出晶体管715的单独的电容器。
[0091]
在本示例中,电流感测晶体管910与输出晶体管715形成电流镜,使电流感测晶体
管910生成与驱动器710的输出电流成正比的感测电流i
sen
。因为感测电流与驱动器710的输出电流i
sen
成正比,所以感测电流i
sen
为开关控制器810提供关于驱动器710的输出电流的信息。感测电流i
sen
提供上述的感测到的输出电流。在某些方面中,感测电流i
sen
是输出电流的缩小比例版本(scaled-down version),这可以通过使电流感测晶体管910的沟道宽度小于输出晶体管715的沟道宽度更小而实现。
[0092]
在本示例中,开关控制器810包括被配置为生成参考电流i
ref
的参考电流源930。如下文进一步所述的,可以由参考电流i
ref
设置上述开关控制器810的阈值。电流感测晶体管910和参考电流源930耦合在节点925处。在图9的示例中,电流感测晶体管910的漏极被耦合到节点925。节点925还耦合到开关820的控制输入922。在本示例中,开关820可以被配置为当控制输入922处的电压下降到比供电电压v
dd
低开关触发电压时闭合。对于用晶体管实现开关820的示例,控制输入922位于晶体管的栅极处,并且开关触发电压可以是晶体管的阈值电压的函数。在图9的示例中,开关820的控制输入922被耦合到参考电流源930和电流传感器740(例如,电流感测晶体管910的漏极)。
[0093]
在输出770从高转变到低期间,电流感测晶体管910生成感测电流i
sen
,感测电流i
sen
与驱动器710的输出电流成正比。将感测电流i
sen
与节点925处的参考电流i
ref
进行比较。如果感测电流i
sen
小于参考电流i
ref
,则参考电流i
ref
可以保持节点925处的电压接近供电电压v
dd
。在这种情况下,开关820断开,并且第二电流源735被禁用。如果感测电流i
sen
大于参考电流i
ref
,则感测电流i
sen
可以使节点925处的电容(未示出)放电,使节点925处的电压降低等于或大于开关触发电压的量。在这种情况下,开关820闭合,并且第二电流源735被启用。节点925处的电容可以包括在开关820的控制输入922处的电容和/或另一电容。因此,在本示例中,如果感测电流i
sen
大于参考电流i
ref
,则开关控制器810启用第二电流源735,并且如果感测电流i
sen
小于参考电流i
ref
,则开关控制器810禁用第二电流源735。在本示例中,可以通过根据期望阈值设置参考电流i
ref
来将开关控制器810的阈值设置为期望阈值。
[0094]
应当认识到,开关控制器810不限于图9中所示的示例性实施方式。例如,在另一实施方式中,开关控制器810可以包括耦合在节点925和电压供应轨v
dd
之间的感测电阻器。在本示例中,感测电阻器可以将感测电流i
sen
转换成节点925处的感测电压,当节点925处的感测电压下降到比供电电压v
dd
低上述开关触发电压时,这会闭合开关820(并且因此启用第二电流源735)。在本示例中,可以通过根据期望阈值设置感电阻器的电阻来设置控制电路750的阈值。
[0095]
图10示出了根据某些方面的参考电流源930、开关820、第一电流源730和第二电流源735的示例性实施方式。
[0096]
在本示例中,参考电流源930用参考电流晶体管1010实现,其中参考电流晶体管1010的栅极由栅极电压偏置(标记为“v
bias”)进行偏置。栅极电压偏置可以与图5中的栅极电压偏置不同。在图10所示的示例中,参考电流晶体管1010用pfet实现,其中参考电流晶体管1010的漏极耦合到节点925(例如,电流感测晶体管910的漏极),并且参考电流晶体管1010的源极耦合到电压供应轨v
dd
。在本示例中,参考电流i
ref
由栅极电压偏置v
bias
以及参考电流晶体管1010的沟道宽度进行设置。
[0097]
在本示例中,第一电流源730用第一电流源晶体管1030实现,并且第二电流源735用第二电流源晶体管1040实现。在图10所示的示例中,第一电流源晶体管1030和第二电流
源晶体管1040均用pfet实现。第一电流源晶体管1030的栅极和第二电流源晶体管1040的栅极可以都由电压偏置v
bias
进行偏置,如图10所示。在本示例中,第一电流源晶体管1030的电流和第二电流源晶体管1040的电流可以独立地进行设置,例如,通过独立地设置第一电流源晶体管1030的沟道宽度和第二电流源晶体管1040的沟道宽度。
[0098]
在图10的示例中,参考电流晶体管1010、第一电流源晶体管1030和第二电流源晶体管1040的栅极被公共栅极电压偏置v
bias
偏置。然而,应当认识到,本公开不限于本示例,并且在其他实施方式中,参考电流晶体管1010、第一电流源晶体管1030和第二电流源晶体管1040的栅极可以由不同偏置电压进行偏置。
[0099]
在本示例中,开关820用开关晶体管1020实现。开关晶体管1020的栅极耦合到节点925并且提供开关820的控制输入922。在图10的示例中,开关晶体管1020用pfet实现,其中开关晶体管1020的漏极耦合到输出晶体管715的栅极,并且开关晶体管1020的源极耦合到第二电流源735。
[0100]
在图10的示例中,相对于图8和图9中开关820和第二电流源735的位置切换开关820和第二电流源735的位置。在两种情况下,开关820和第二电流源735串联耦合在晶体管715的栅极和电压供应轨v
dd
之间,其中当开关820闭合时启用第二电流源735,并且当开关820断开时禁用第二电流源735。
[0101]
图11示出了根据本公开的某些方面的被配置为基于输入电压(被标记为“v
in”)将驱动器输出拉高或拉低的压摆率受控的驱动器1110的示例。如下文进一步所述的,驱动器1110组合了图2中的示例性驱动器210和图7中的示例性驱动器710。
[0102]
驱动器1110包括输出级1112、第一电流源1130、第二电流源1135、第三电流源1132、第四电流源1137、第一电流传感器1140、第二电流传感器1142、第一控制电路1150、第二控制电路1152、第一开关1160、第二开关1165、第三开关1170和第四开关1175。第一开关1160、第二开关1165、第三开关1170和第四开关1175的闭合/断开状态受到在驱动器1110的输入1180处的输入电压的控制,如下文进一步所述的。
[0103]
输出级1112包括第一输出晶体管1115和第二输出晶体管1120。在图11的示例中,第一输出晶体管1115用耦合在电压供应轨v
dd
和驱动器1110的输出1190之间的pfet实现,并且第二输出晶体管1120用耦合在驱动器1110的输出1190和接地轨之间的nfet实现。第一输出晶体管1115被配置为将输出1190驱动为高(即,拉高输出1190),并且可以对应于图2中的输出晶体管215。第二输出晶体管1120被配置为将输出1190驱动为低(即,拉低输出1190),并且可以对应于图7中的输出晶体管715,如下文进一步所述的。
[0104]
在本示例中,第一开关1160耦合在第一输出晶体管1115的栅极和电压供应轨v
dd
之间。第一电流源1130和第三开关1170串联耦合在第一输出晶体管1115的栅极和接地轨之间。第二电流源1135被第一控制电路1150选择性地启用或禁用,如下文进一步所述的。第一电流传感器1140被配置为感测流动通过第一输出晶体管1115的驱动器1110的输出电流。
[0105]
第一控制电路1150耦合到第一电流传感器1140和第二电流源1135。在一个示例中,第一控制电路1150被配置为:如果来自第一电流传感器1140的感测到的输出电流高于第一阈值,则启用第二电流源1135。在这种情况下,高于第一阈值的感测输出电流可以指示耦合到输出1190的大的负载电容c
load
。第一控制电路1150被配置为:如果来自第一电流传感器1140的感测到的输出电流低于第一阈值,则禁用第二电流源1135。
[0106]
第一电流源1130可以对应于图2中所示的第一电流源230,第二电流源1135可以对应于图2中所示的第二电流源235,第一电流传感器1140可以对应于图2中所示的电流传感器240,并且第一控制电路1150可以对应于图2中所示的控制电路250。因此,上文给出的第一电流源230、第二电流源235、电流传感器240和控制电路250的描述分别适用于第一电流源1130、第二电流源1135、第一电流传感器1140和第一控制电路1150。
[0107]
在本示例中,第二开关1165耦合在第二输出晶体管1120的栅极和接地轨之间。第三电流源1132和第四开关1175串联耦合在电压供应轨v
dd
的栅极和第二输出晶体管1120的栅极之间。第四电流源1137被第二控制电路1152选择性地启用或禁用,如下文进一步所述的。第二电流传感器1142被配置为感测流动通过第二输出晶体管1120的驱动器1110的输出电流。
[0108]
第二控制电路1152耦合到第二电流传感器1142和第四电流源1137。在一个示例中,第二控制电路1152被配置为:如果来自第二电流传感器1142的感测到的输出电流高于第二阈值,则启用第四电流源1137。在这种情况下,高于第二阈值的感测到的输出电流可以指示耦合到输出1190的大的负载电容c
load
。第二控制电路1152被配置为:如果来自第二电流传感器1142的感测到的输出电流低于第二阈值,则禁用第四电流源1137。第一阈值和第二阈值可以相同或不同。
[0109]
第三电流源1132可以对应于图7中所示的第一电流源730,第四电流源1137可以对应于图7中所示的第二电流源735,第二电流传感器1142可以对应于图7中所示的电流传感器740,并且第二控制电路1152可以对应于图7中所示的控制电路750。因此,上文给出的第一电流源730、第二电流源735、电流传感器740和控制电路750的描述分别适用于第三电流源1132、第四电流源1137、第二电流传感器1142和第二控制电路1152。
[0110]
在操作中,驱动器1110被配置为基于驱动器1110的输入1180处的输入电压将输出1190驱动为高或低。更具体地,当输入电压具有第一逻辑值时,驱动器1110将输出1190驱动为高,并且当输入电压具有第二逻辑值时,驱动器1110将输出1190驱动为低。第一逻辑值可以是低(例如,大致为接地),并且第二逻辑值可以是高(例如,大致为v
dd
),或者反之亦然。
[0111]
当输入电压具有第一逻辑值时,第二开关1165闭合(即,导通),并且第一开关1160断开(即,截止)。结果,第二输出晶体管1120的栅极通过第二开关1165耦合到接地轨,这禁用(即,截止)了第二输出晶体管1120。另外,第三开关1170闭合(即,导通),并且第四开关1175断开(即,截止)。结果,第一电流源1130耦合到第一输出晶体管1115的栅极。
[0112]
在这种情况下,第一电流源1130、第二电流源1135、第一电流传感器1140和第一控制电路1150分别以类似于图2中所示的第一电流源230、第二电流源235、电流传感器240和控制电路250的方式耦合。
[0113]
第一电流源1130从第一输出晶体管1115的栅极汲取电流,以将第一输出晶体管1115的栅极预驱动为低,这使第一输出晶体管1115导通。第一电流传感器1140感测流动通过第一输出晶体管1115的驱动器1110的输出电流,并且将感测到的输出电流传达到第一控制电路1150。如果来自第一电流传感器1140的感测到的输出电流高于第一阈值,则第一控制电路1150启用第二电流源1135。在这种情况下,第二电流源1135为第一输出晶体管1115提供附加的预驱动电流。如果来自第一电流传感器1140的感测输出电流低于第一阈值,则第一控制电路1150禁用第二电流源1135。
[0114]
出于上文针对电流传感器240、控制电路250和第二电流源235给出的原因,第一电流传感器1140、第一控制电路1150和第二电流源1135针对输出1190从低到高的转变提供压摆率控制。因此,这里为了简洁起见不会重复对压摆率控制的详细描述。第一电流传感器1140可以用电流感测晶体管(例如,电流感测晶体管410)实现。第一控制电路1150可以用图3到图5中的任何示例性实施方式来实现。
[0115]
当输入电压具有第二逻辑值时,第二开关1165断开(即,截止),并且第一开关1160闭合(即,导通)。结果,第一输出晶体管1115的栅极通过第一开关1160耦合到电压源轨v
dd
,这禁用(即,截止)了第一输出晶体管1115。另外,第三开关1170断开(即,截止),并且第四开关1175闭合(即,导通)。结果,第三电流源1132耦合到第二输出晶体管1120的栅极。
[0116]
在这种情况下,第三电流源1132、第四电流源1137、第二电流传感器1142和第二控制电路1152分别以类似于图7中所示的第一电流源730、第二电流源735、电流传感器740和控制电路750的方式耦合。
[0117]
第三电流源1132向第二输出晶体管1120的栅极供应电流,以将第二输出晶体管1120的栅极预驱动为高,这使第二输出晶体管1120导通。第二电流传感器1142感测流动通过第二输出晶体管1120的驱动器1110的输出电流,并且将感测到的输出电流传达到第二控制电路1152。如果来自第二电流传感器1142的感测到的输出电流高于第二阈值,则第二控制电路1152启用第四电流源1137。在这种情况下,第四电流源1137为第二输出晶体管1120提供附加的预驱动电流。如果来自第二电流传感器1142的感测到的输出电流低于第二阈值,则第二控制电路1152禁用第四电流源1137。
[0118]
出于上文针对电流传感器740、控制电路750和第二电流源735给出的原因,第二电流传感器1142、第二控制电路1152和第四电流源1137针对输出1190从高到低的转变提供压摆率控制。因此,这里为了简洁起见不会重复对压摆率控制的详细描述。第二电流传感器1142可以用电流感测晶体管(例如,电流感测晶体管910)实现。第二控制电路1152可以用图8到图10中所示的任何示例性实施方式来实现。
[0119]
图12示出了根据某些方面的示例,在该示例中驱动器1220用于在系统1210(例如,移动装置)中的第一芯片1212和第二芯片1214之间提供芯片到芯片通信。驱动器1220可以包括上述的示例性压摆率受控的驱动器210、710和1110中的任何一种。在本示例中,驱动器1220被集成在第一芯片1212上,并且对应的接收器1240被集成在第二芯片1214上。
[0120]
驱动器1220的输出1224耦合到第一芯片1212上的第一焊盘1225,并且接收器1240的输入1242耦合到第二芯片1214上的第二焊盘1245。传输线1230耦合在第一焊盘1225和第二焊盘1245之间。传输线1230可以包括衬底(例如,印刷电路板)上的一个或多个金属迹线、电缆(例如,同轴电缆)、一个或多个导线或其任何组合。
[0121]
在操作中,待传输到第二芯片1214的输入信号(例如,数据信号)被输入到驱动器1220的输入1222。输入信号具有图12中的电压v
in
。输入信号可以来自第一芯片1212上的处理器(未示出)或第一芯片1212上的另一器件。驱动器1220然后基于输入信号对传输线1230进行驱动。驱动器1220的输出具有图12中的电压v
out
。
[0122]
接收器1240经由传输线1230从驱动器1220的输出1224接收信号,并处理所接收的信号。例如,接收器1240可以放大信号、对信号进行均衡(例如,以补偿信号失真)、对信号采样以从信号恢复数据位等。接收器1240可以在输出1244处向第二芯片1214上的处理器(未
示出)输出所得到的处理信号,以进行进一步处理。
[0123]
在本示例中,驱动器1220可以根据本公开的一个或多个方面来实现压摆率控制,以在整个负载电容的范围内提供更均匀的压摆率。负载电容可以包括传输线1230的电容、第一焊盘1225的电容等。
[0124]
图13示出了根据某些方面的用于驱动器的压摆率控制方法1300。驱动器包括耦合在轨和驱动器的输出之间的输出晶体管。驱动器可以对应于驱动器210、710或1110,轨可以是电压供应轨v
dd
或接地轨,并且输出晶体管可以对应于输出晶体管215、715、1115或1120。
[0125]
在框1310处,使用第一电流源以预驱动电流对输出晶体管的栅极进行预驱动。第一电流源可以对应于电流源230、730、1130或1132。
[0126]
在框1320处,感测驱动器的输出电流。例如,可以使用电流传感器240、740、1140或1142来感测输出电流。在某些方面中,在正在对输出晶体管的栅极进行预驱动的同时感测输出电流。
[0127]
在框1330处,如果感测到的输出电流高于阈值,则启用第二电流源,第二电流源为输出晶体管的栅极提供附加的预驱动电流。第二电流源可以对应于电流源235、735、1135或1137。第二电流源可以由控制电路250、750、1150或1152启用。
[0128]
在框1340处,如果感测到的输出电流低于阈值,则禁用第二电流源。第二电流源可以由控制电路250、750、1150或1152禁用。
[0129]
在某些方面中,感测驱动器的输出电流可以包括基于输出电流生成感测电流。可以由电流感测晶体管(例如,电流感测晶体管410或910)生成感测电流。感测电流(例如i
sen
)可以与驱动器的输出电流(例如,输出电流的缩小比例版本)大约成正比。在这些方面中,如果感测电流大于参考电流(例如,i
ref
),则可以启用第二电流源,并且如果感测电流小于参考电流,则禁用第二电流源。可以由参考电流源(例如,参考电流源430或930)生成参考电流。
[0130]
应当认识到,本公开不限于上文用于描述本公开的各方面所使用的示例性术语。例如,驱动器也可以被称为输出驱动器、驱动电路、焊盘驱动器或另一术语。在另一个示例中,压摆率也可以被称为转变时间、升/降时间或另一术语。在另一个示例中,轨可以指代电压供应轨,或者在电压供应为零的特定情况下,指代接地轨。此外,电压供应轨也可以被称为电力供应轨、电压轨、电力轨等。
[0131]
本文中使用诸如“第一”、“第二”等指定对元件的任何引用通常都不限制那些元件的数量或次序。相反,本文将这些指定用作在两个或更多元件或元件实例之间进行区分的方便方式。因此,对第一和第二元件的引用不表示可以被采用的仅有的两个元件,或者第一元件必须要在第二元件之前。
[0132]
在本公开内,使用“示例性”一词表示“充当示例、实例或例示”。本文描述为示例性的任何实施方式或方面不必理解为相比本公开的其它方面为优选的或有利的。同样,术语“方面”不需要本公开的所有方面都包括所论述的特征、优点或操作模式。
[0133]
提供本公开的此前描述以使本领域的任何技术人员能够做出或使用本公开。对本公开的各种修改将对于本领域的技术人员而言是显而易见的,可以将本文定义的一般性原理应用于其他变体,而不脱离本公开的范围。因此,本公开并非要限于本文描述的示例,而是要符合根据本文公开的原理和新颖特征的最宽范围。
[0134]
在下文中,描述更多示例,以促进对本发明的理解。
[0135]
在一个示例中,描述了一种驱动器,该驱动器包括:耦合在第一轨和驱动器的输出之间的输出晶体管;耦合到输出晶体管的栅极的第一电流源;第二电流源;开关,其中开关和第二电流源串联耦合在输出晶体管的栅极和第二轨之间;被配置为基于驱动器的输出电流生成感测电流的电流传感器;以及被配置为生成参考电流的参考电流源,其中电流传感器和参考电流源耦合到开关的控制输入。电流传感器可以包括电流感测晶体管,电流感测晶体管具有耦合到输出晶体管的栅极的栅极、耦合到参考电流源的漏极、以及耦合到第一轨的源极。电流感测晶体管的栅极可以电容性耦合到输出晶体管的漏极。第一轨可以包括电压供应轨,并且输出晶体管可以包括源极耦合到电压供应轨并且漏极耦合到驱动器的输出的p型场效应晶体管。第二电流源可以被配置为从输出晶体管的栅极汲取电流。第二轨可以包括接地轨。第一轨可以包括接地轨,输出晶体管可以包括源极耦合到接地轨并且漏极耦合到驱动器的输出的n型场效应晶体管。此外,第二电流源可以被配置为向输出晶体管的栅极供应电流。第二轨可以包括电压供应轨。此外,参考电流源可以包括漏极耦合到电流感测晶体管的漏极、源极耦合到第二轨、并且栅极由电压偏置进行偏置的参考电流晶体管。开关可以包括开关晶体管,并且开关的控制输入可以位于开关晶体管的栅极处。参考电流源可以包括漏极耦合到电流传感器、源极耦合到第二轨、并且栅极由电压偏置进行偏置的参考电流晶体管。而且,开关可以包括开关晶体管,并且开关的控制输入可以位于开关晶体管的栅极处。
[0136]
在另一个示例中,描述了一种驱动器,该驱动器包括:耦合在轨和驱动器输出之间的输出晶体管;耦合到输出晶体管的栅极的第一电流源;被配置为当第二电流源被启用时从输出晶体管的栅极汲取电流或向输出晶体管的栅极提供电流的第二电流源;被配置为感测驱动器的输出电流的电流传感器;以及耦合到电流传感器和第二电流源的控制电路,其中控制电路被配置为:如果感测到的输出电流高于阈值则启用第二电流源,如果感测到的输出电流低于阈值则禁用第二电流源。轨可以包括电压供应轨,并且输出晶体管可以包括源极耦合到电压供应轨并且漏极耦合到驱动器的输出的p型场效应晶体管。第二电流源可以被配置为当第二电流源被启用时从输出晶体管的栅极汲取电流。第一电流源可以被配置为从输出晶体管的栅极汲取电流。轨可以包括接地轨,输出晶体管可以包括耦合到驱动器的输出并且源极耦合到接地轨的n型场效应晶体管。第二电流源可以被配置为当第二电流源被启用时向输出晶体管的栅极供应电流。第一电流源可以被配置为向输出晶体管的栅极供应电流。
[0137]
在又一个示例中,描述了一种用于驱动器的压摆率控制方法,该驱动器包括耦合在轨和驱动器输出之间的输出晶体管,该方法包括:使用第一电流源以预驱动电流对输出晶体管的栅极进行预驱动;感测驱动器的输出电流;如果感测到的输出电流高于阈值,则启用第二电流源,第二电流源为输出晶体管的栅极提供附加的预驱动电流;如果感测到的输出电流低于阈值,则禁用第二电流源。轨可以包括电压供应轨,并且输出晶体管可以包括源极耦合到电压供应轨并且漏极耦合到驱动器的输出的p型场效应晶体管。该方法可以包括通过附加的预驱动电流降低输出晶体管的栅极处的电压。轨可以包括接地轨,并且输出晶体管可以包括耦合到驱动器的输出并且源极耦合到接地轨的n型场效应晶体管。该方法可以包括通过附加的预驱动电流提高输出晶体管的栅极处的电压。感测驱动器的输出电流可
以包括基于输出电流生成感测电流,启用第二电流源可以包括如果感测电流大于参考电流则启用第二电流源,并且禁用第二电流源可以包括如果感测电流小于参考电流则禁用第二电流源。感测电流可以与输出电流大约成正比。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1