用于制造磁性可变形机械的方法和可变形3D磁性机械与流程
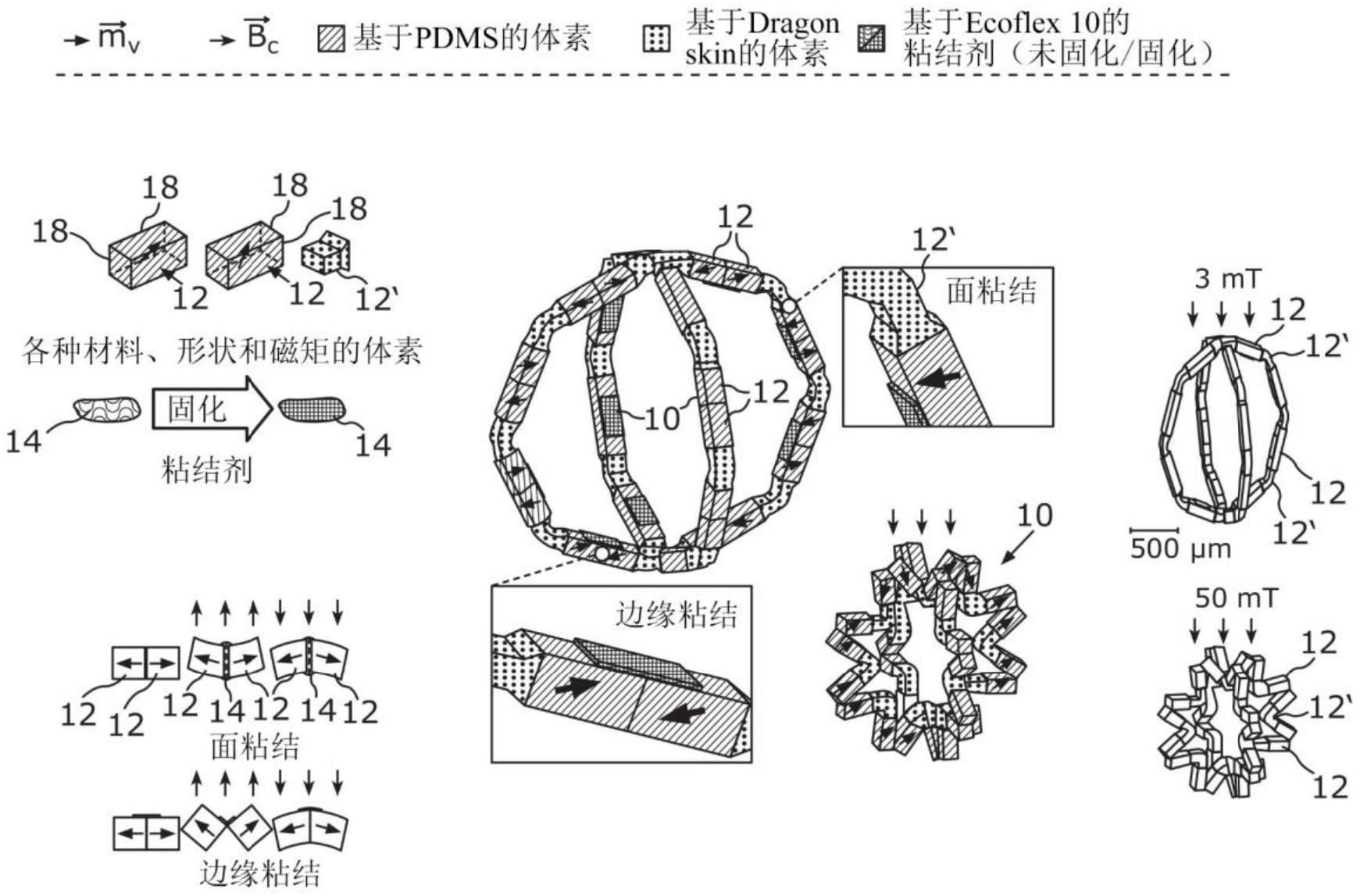
本发明涉及一种制造包括异构体素的磁性可变形机械的方法以及一种可变形3d磁性机械,该磁性机械具有小于10000mm的尺寸,该磁性机械包括多个体素,多个体素中的至少一些体素是磁性的,其中体素中的至少一者具有小于500mpa的杨氏模量,多个体素用粘结剂彼此粘结,其中每个体素具有预定义形状、尺寸,具有预定义磁性性质和预定义材料性质。
背景技术:
1、对外部刺激作出反应的小型软体机械有望在仿生机器人、微型工厂和微创医疗装置方面实现突破性应用。外部磁场已经成为软机械的安全、快速、精确、灵巧和无线致动的有前途的刺激选择。当此类磁性机械的总尺寸缩小到亚毫米级时,它们的设计和功能受到可用制造方法的严重限制,这些制造方法仅适用于材料、几何形状和磁化轮廓的有限选择。
2、尽管最近的研究已经将小型磁性软机械从二维(2d)模铸和激光切割方法推进到基于挤出和基于紫外线(uv)光刻的3d打印方法,但尚未实现多种任意材料组合物与任意3d磁性设置(3d magnetic programming)和几何形状的集成。此外,现有的方法受到一些根本约束,限制了它们进一步改进。具体地,基于挤出的方法因对存储模量的苛刻要求、由添加的磁性颗粒引起的性能退化和软弹性体的挤出溶胀而无法制造较细的磁性软纤维来编织复杂结构。另外,未固化的液体光刻胶内部的磁性颗粒的强烈局部相互作用会限制通过基于光刻的方法来设置相邻体素的任意磁化。
技术实现思路
1、鉴于这些挑战,本发明的目的是提供一种制造磁性可变形机械的方法,所述磁性可变形机械可以用尽可能容易且可重复的方法生产,甚至在克服以上缺点的低于毫米范围的尺度下也是如此。本发明的另一个目的是提供可用的磁性机械,所述磁性机械可以在目标位点处远程地变形并且可以在到达目标位点之前移动经过各种环境。
2、该目标由根据相应独立权利要求的主题的方法和磁性可变形机械来实现。
3、这种制造包括异构体素(即,不同特性、性质和组合物的体素)的磁性可变形机械的方法包括以下顺序的步骤:
4、-定义磁性机械的变形特性;
5、-参考磁性机械的变形特性来制作磁性机械的蓝图;
6、-提供多个体素,所述多个体素中的至少一者、优选地一些体素是磁性的并且其中多个体素中的至少一个体素具有小于500mpa的杨氏模量;
7、-根据所制作的蓝图使用粘结剂将多个体素彼此粘结以组装磁性机械;以及
8、-使粘结剂固化。
9、因此,本发明提供了一种自底向上组装方法,其中逐步地将各个体素彼此粘结以形成可变形磁性机械。与使用自顶向下法的现有技术方法相比,可获得形成磁性机械的前所未有的准确性。另外,当前方法实施起来非常简单,因为各个构建块(即,体素)可以适应于磁性机械的特定功能,并且然后根据蓝图简单地连接到它们的直接相邻体素。
10、例如,某些体素可以被配置以便准许通过施加第一磁场而经由磁性机械的磁性性质在第一位置和第二位置之间运送磁性机械,而其他体素可以被配置为改变磁性机械的外观,即,例如通过扩展、限制尺寸来允许磁性机械变形,或者例如通过施加与第一磁场不同的第二磁场来允许磁性机械的部件相对于磁性机械的另一部分移动。
11、取决于磁性机械的类型,要求磁性机械的变形以便能够移动磁性机械和/或针对磁性机械的确切应用来改变磁性机械的外观。通过能够制造可以变形且从而可以实施特定功能的磁性机械,本发明还实现可设置磁性机械的生产。
12、例如,如果选择封装的磁性机械,以便将有效载荷从第一位置运送到第二位置以在第二位置处卸载该有效载荷,那么必须根据有效载荷来选择磁性机械的尺寸,必须选择磁性机械的刚度性质以便能够可靠地运送有效载荷,必须选择磁性机械的磁性性质以便能够将磁性机械从第一位置移动到第二位置,并且必须选择变形特性以便能够在第一位置处装载有效载荷并在第二位置处从磁性机械释放有效载荷,即,除了该磁性机械可以变形以便将磁性机械从第一位置移动到第二位置的方式以外,还可以施加第二种磁场以便使磁性机械变形。
13、为了确定尺寸,检查使用环境,例如,如果意图使用胶囊在人的胃中运送有效载荷,则选择例如5至20mm的平均胶囊尺寸。然后例如通过必须要运送的有效载荷的量等来确定刚度性质。这些是可以实施来定义磁性机械的变形特性并且然后制作磁性机械的蓝图的步骤。
14、在这一点上,应注意,蓝图是如何参考磁性机械的变形特性将不同的构建块(即,体素)相对于彼此组装并使用粘结剂彼此粘结以形成期望的磁性机械的说明手册。
15、当前的自底向上制造方法允许基于异构组装的三维(3d)微制造策略以高分辨率产生具有任意多材料组合物、任意3d几何形状和任意可设置3d磁化轮廓的复合3d微型无线磁性软机械。这种方法有助于在原型机械上实现多样的特性,诸如可设置形状渐变、负泊松比、复合刚度分布、定向接合部弯曲以及用于形状重新配置的重新磁化。这些特性进一步解放了设计并且实现各种生物医学装置相关功能,诸如蠕动泵送、主动货物运送和递送、受控表面锚固和释放以及信息加密。这种3d异构集成方法显著地改进了3d磁性软机械可实现的复杂性水平,并且因此提高了它们未来在机器人、生物医学装置和生物工程应用中的能力和性能。作为组装方法的独特优点,可以利用任意几何形状、材料和磁性设置通过任意/不同微制造过程来制造此类体素。
16、定义磁性机械的变形特性的步骤可以包括选自由以下项组成的成员组的步骤中的至少一者:
17、-定义磁性机械的应用;
18、-定义磁性机械的相应应用的工作环境;
19、-定义磁性机械的变形参数;
20、-选择磁性机械的尺寸;
21、-选择磁性机械的形状;
22、以及前述项的组合。以此方式,方法的用户可以使磁性机械的制造适于其确切的工作环境并且产生定制的磁性机械。
23、蓝图可以包括:用于形成磁性机械的相应体素的数量、用于形成磁性机械的相应体素的布置、用于形成机械的相应体素的性质(例如,杨氏模量、磁化轮廓、刚度、机械强度、耐久性、变形、最大应变或应力、药物或其他分子装载能力、远程加热性质、多孔性、气体、液体或分子渗透性、导电性或导热性、热膨胀、液体溶胀性质、刺激(例如,ph、化学品、温度、湿度、流量、压力、葡萄糖)响应、生物相容性、生物或其他降解性或溶解性、在特定成像技术(例如,荧光成像、近红外成像、磁共振成像、正电子发射断层扫描、超声成像、光声成像、荧光镜检查、计算机断层扫描)中的可见性、免疫响应性质、蛋白质吸收性质、酶反应性质、对其他体素、生物组织或其他表面的暂时粘附或永久粘附)、在用于形成磁性机械的体素处的固化剂的布置。
24、因此,蓝图包括在哪种布置中需要哪种体素以便产生适于相应工作环境的磁性机械的说明。
25、在这一点上,应注意,磁化轮廓定义体素的磁场的矢量场的空间轮廓,所述空间轮廓表达磁性材料中的永久或感应磁偶极矩的密度。
26、制作磁性机械的蓝图的步骤可以包括选自由以下项组成的成员组的步骤中的至少一者:
27、-选择不同体素的材料以定义磁性机械的刚度性质;
28、-选择用于磁性机械的相应体素的一种或多种材料;
29、-选择磁性体素的均匀3d磁化轮廓或非均匀3d磁化轮廓以定义磁性机械的基于磁矩的变形性质或磁力的变形性质;
30、-选择相应体素的尺寸;
31、-选择相应体素的形状;
32、-选择相应体素的磁性性质;
33、-选择相应体素的材料性质;
34、-基于蓝图来模拟磁性机械的行为和/或变形;
35、-根据对磁性机械的行为和/或变形的模拟结果来调整磁性机械的蓝图;
36、以及前述项的组合。
37、以此方式,可以组装磁性机械的特定构建块以产生适于相应工作环境的磁性机械。
38、每个体素可以具有3d形状并且可以具有预定义形状、尺寸,可以具有预定义磁性性质和预定义材料性质,例如,杨氏模量、磁化轮廓、刚度、机械强度、耐久性、变形、最大应变或应力、药物或其他分子装载能力、远程加热性质、多孔性、气体、液体或分子渗透性、导电性或导热性、热膨胀、液体溶胀性质、刺激(例如,ph、化学品、温度、湿度、流量、压力、葡萄糖)响应、生物相容性、生物或其他降解性或溶解性、在特定成像技术(例如,荧光成像、近红外成像、磁共振成像、正电子发射断层扫描、超声成像、光声成像、荧光镜检查、计算机断层扫描)中的可见性、免疫响应性质、蛋白质吸收性质、酶反应性质、对其他体素、生物组织或其他表面的暂时粘附或永久粘附。
39、通过使用以上种类的体素,每个构建块可以适于非常特定的功能,例如,磁性机械的稳定性、磁性机械的运送、磁性机械的变形等。
40、磁性机械的磁性体素的磁化轮廓可以通过磁感测或成像技术可见(例如,使用克尔效应和/或法拉第效应的磁光感测、磁力显微术、磁性x射线显微术)。以此方式,磁性机械的体素中的一些对成像技术可能不可见,而同时对跟踪技术可见,反之亦然。如果例如在医学领域中将磁性机械部署为微型机器人,则这可能有益于可以利用磁性机械实施的跟踪和放置应用。
41、将多个体素彼此粘结的步骤可以在体素的一个或多个面和/或一个或多个边缘处进行。以此方式,可以提高可变形磁性机械的工作准确性,因为例如可以根据体素如何彼此粘结来影响体素相对于彼此的移动。
42、将多个体素彼此粘结的步骤可以包括在后续步骤中将一个体素粘结到另一个体素;并且/或者将多个体素彼此粘结的步骤可以包括逐组地将一组体素粘结到另一组体素。以此方式,如果例如正在组装机械的非常灵活和/或灵敏部分,则各个体素可以在后续步骤中彼此附接,然而,如果正在组装磁性机械的坚固但不是特别灵活或灵敏的部分,则可以通过在相同时间点将若干体素彼此粘结而以类似批量的过程将形成机械的这个部分的体素彼此粘结。
43、在这一点上,类似批量的过程可以是其中将若干体素放置到支撑件中并在相同时间点彼此模制的过程,其中支撑件具有匹配将要形成的磁性机械的至少一部分的预定义形状和尺寸。
44、相应的体素可以在粘结到其相邻体素之前、在粘结到其相邻体素的同时或在已经粘结到其相邻体素之后被磁化。以此方式,该方法在形成机械时可以更通用。
45、将多个体素彼此粘结的步骤可以包括以下步骤:提供具有磁性可变形机械的至少一部分的阴形状(negative shape)的夹具、特别是一个或多个夹具,并且将预定义量的多个体素放置到所述夹具中且然后在所述夹具中对预定义量的多个体素进行粘结。夹具的使用实现体素的改进且更准确的放置以及因此更准确地形成的机械。
46、预定义量的多个体素中的一者或多者可以在一个时间点借助机器人(未示出)放置到夹具中。使用机器人来放置体素可以提高放置准确性,并且在例如形成医疗机械的情况下有助于维持无菌环境。
47、预定义量的多个体素中的一者或多者可以在放置到所述夹具中之前或者在已经放置到所述夹具中并且已经粘结到多个体素中的一者或多者的相邻体素之后被磁化。因此,夹具还可以用来将体素磁化以便向其提供期望的预定义磁化取向。
48、使粘结剂固化的步骤可以在室温下或在另一特定温度下并且在进行粘结步骤的环境内进行,使粘结剂固化的步骤可以通过紫外(uv)光源或另一波长的光源来进行,或者使粘结剂固化的步骤可以在炉内或在热板处进行。此类粘结方法确保磁性机械的可靠且容易的制造方法。
49、磁性机械的相应边长可以具有小于10000mm、特别是小于100mm的尺寸;并且/或者每个体素可以具有3d形状,其中在2500mm至5nm的范围内、特别是在25mm至1μm的范围内选择3d形状的相应边长的尺寸;并且/或者每个体素可以具有选自由以下项组成的成员组中选择的形状:正方形体素、矩形体素、圆形体素、多边形体素、三角形体素和任何任意3d形状体素,以及前述项的组合。以此方式,可以在亚毫米范围内并且针对更多种类的应用形成各种各样的磁性机械。在这一点上,应注意,尺寸大于10mm的体素可以在向其中浇铸体素的对应材料的对应模具中形成。
50、在这一点上,应注意,此类形状可以有益地使用诸如3d打印和/或双光子激光光刻或光刻和/或铸造技术的技术来形成。一般而言,只要能提供具有期望的形状、尺寸和性质的体素,就可以使用任何形式的生产方法来形成体素。
51、根据又一方面,本发明还涉及一种可变形3d磁性机械,该磁性机械具有小于10000mm的尺寸,该磁性机械包括多个体素,所述多个体素中的至少一个体素、优选地一些体素是磁性的,其中体素中的至少一者具有小于500mpa的杨氏模量,使用粘结剂将多个体素彼此粘结,其中每个体素具有预定义形状、尺寸,具有预定义磁性性质和预定义材料性质,例如,杨氏模量、磁化轮廓、刚度、机械强度、耐久性、变形、最大应变或应力、药物或其他分子装载能力、远程加热性质、多孔性、气体、液体或分子渗透性、导电性或导热性、热膨胀、液体溶胀性质、刺激(例如,ph、化学品、温度、湿度、流量、压力、葡萄糖)响应、生物相容性、生物或其他降解性或溶解性、在特定成像技术(例如,荧光成像、近红外成像、磁共振成像、正电子发射断层扫描、超声成像、光声成像、荧光镜检查、计算机断层扫描)中的可见性、免疫响应性质、蛋白质吸收性质、酶反应性质、对其他体素、生物组织或其他表面的暂时粘附或永久粘附。
52、借助前面讨论的方法,因此可以形成与现有技术机械相比具有改进的移动和部署准确性的磁性机械。这是因为与使用自顶向下组装而不是自底向上法的现有技术相比,它们可以形成有显著改进的分辨率。此外,以上方法可以有利地用于将多种不同的材料集成到单个装置中。前面讨论的优点自然地也适用于下面讨论的磁性机械。
53、通过提供其中至少一者、优选地一些是磁性的多个体素,磁性机械可以在空间上分开定位的不同位置之间移动,并且可以致动磁性机械,使得如果要由磁性机械实施特定期望的功能,则能够改变该磁性机械的形状。
54、各个体素可以由具有不同杨氏模量的材料制成以定义磁性机械的刚度模式。通过定义刚度模式实现了磁性机械的变形,使得该磁性机械可以被致动以实施磁性机械的形状的期望改变来实施期望的功能。
55、在这一点上,应注意,体素是可以具有磁化材料、硬/软材料、生物可降解或非生物可降解材料的构建块,该材料经选择以实施自底向上制造过程而不是自顶向下制造法并且使磁性机械的每个部分适应于磁性机械的特定移动和/或致动功能。
56、磁性机械的相应边长可以具有小于100mm、特别是小于5mm的尺寸;并且/或者每个体素可以具有3d形状,其中在500mm至5nm的范围内、特别是在10mm至1μm的范围内选择3d形状的相应边长的尺寸;并且/或者每个体素可以具有选自由以下项组成的成员组中选择的形状:正方形体素、矩形体素、圆形体素、多边形体素、三角形体素以及任何任意3d形状体素。
57、磁性机械可以是货物(例如,药物、干细胞、基因、显像剂、t细胞、巨噬细胞)递送装置,其可以运送货物并在目标位点处通过使该装置变形或打开该装置来释放货物;或者磁性机械可以是以下项中的一者:锚固装置、支架、软蠕动泵或其他类型的液体泵、软立方体框架、信息加密装置、可变形超材料、形状可适应机器人或形状可设置机器人、夹持器、可折叠装置、堵塞装置、游动机器人、器官模型、合成心脏或其他器官,以及可收缩的环形花。此类磁性机械可以在多种环境中用于各种各样的应用。
58、磁性机械的非磁性体素中的至少一些体素的材料可以分别选自由以下项组成的非磁性材料组:弹性体、热塑性弹性体、橡胶、硬质塑料、热塑性塑料,例如,聚二甲基硅氧烷、脂肪族芳族共聚酯或改性聚酯、或改性共聚酯、聚氨酯弹性体、硅橡胶、天然橡胶、乳胶、苯乙烯乙烯丁烯苯乙烯、丁基橡胶、氟硅橡胶、聚酯、尼龙、热塑性聚氨酯;生物可降解合成材料,例如,聚乙交酯聚交酯、聚(己内酯)、聚(对二氧环己酮)、聚(乙二醇)二丙烯酸酯、聚(n-异丙基丙烯酰胺);生物材料,例如,明胶、壳聚糖、藻朊酸盐、琼脂糖、透明质酸衍生物、弹性蛋白、壳聚糖、纤维蛋白胶、纤维素、纤连蛋白、胶原、蚕丝;水凝胶;离子凝胶;液晶聚合物、弹性体或凝胶;形状记忆聚合物;光刻胶聚合物,例如,su-8;生物蛋白质,例如,乌贼环齿蛋白质;织物材料;非磁性金属;硅胶;二氧化硅;玻璃;木材;碳纤维;以及前述项的衍生物和组合。由此,磁性机械可以适于其特定用途。
59、磁性体素中的至少一些的材料可以选自由以下项组成的成员组:以大量的颗粒形式、盘形式、线形式、纤维形式或以不对称颗粒的形式存在的磁性材料,诸如二氧化铬(cro2)、钐钴(smco)、钕铁硼(ndfeb)、钴(co)、铁酸盐、坡莫合金(nife)、碳钢、钨钢、磁钢、铁、不锈钢、镍(ni)、铁铂(fept)、氧化铁、钡铁氧体、磁铁;前述项的组合或复合材料;和/或涂有由以上磁性材料或它们的组合制成的磁性膜或磁性层的体素。此外,磁性复合材料可以嵌入在前述非磁性体素材料内部、或者覆盖或沉积在前述非磁性体素材料上以形成体素。另外,可以使用各种磁性体素的组合来形成磁性机械。
60、粘结剂的材料可以选自由以下项组成的成员组:未固化的硅橡胶、pdms、聚氨酯、改性共聚酯、硅橡胶和前述材料的其他未固化的聚合物、温度固化聚合物、uv或另一波长光固化聚合物、化学固化聚合物、蜡、胶带、强力胶、外科胶、各种生物聚合物(例如,明胶、脱氧核糖核酸(dna)和基础粘结剂),以及前述项的组合。此类粘结剂准许形成适于实施其相应应用的更准确且更高分辨率的磁性机械。
61、诸如对于均匀磁性体素,磁性体素可以具有任何任意3d磁化轮廓,每个体素可以具有在0至1t的范围内选择、优选地在0至50mt的范围内选择的平均表面磁场强度,其中每个体素具有磁场强度的预定义取向,例如平行于相应体素的面或垂直于相应体素的面或者关于相应体素的一个或多个面倾斜,对于非均匀磁性体素,每个体素可以具有贯穿体素的非均匀磁化分布和贯穿体素的变化磁性取向。
62、通过选择相应体素的相应形状、尺寸和材料组合物以及粘结剂,可以形成高分辨率磁性机械。以此方式,获得能够以快速且高效的方式在空间上彼此分开的各种位置之间移动的磁性机械,并且使得所述磁性机械在期望的目标位置改变其形状和/或尺寸以便实施其期望功能。
63、根据一方面,本发明还涉及一种将磁性机械用作以下至少一者的用途:货物(例如,药物、干细胞、基因、显像剂、t细胞、巨噬细胞)递送装置,其可以运送货物并在目标位点处通过使该装置变形或打开该装置来释放货物;锚固装置;支架;软蠕动泵或其他类型的液体泵;软立方体框架;信息加密装置;可变形超材料;形状可适应机器人或形状可设置机器人;夹持器;可折叠装置;堵塞装置;游动机器人;器官模型;合成心脏或其他器官;以及可收缩的环形花。
- 还没有人留言评论。精彩留言会获得点赞!