封装有相机和人工智能处理器以调节照明的自主前照灯的制作方法
背景技术:
1、车辆上的前照灯照射道路的周围环境,使得车辆的驾驶员检测潜在危险并了解周围环境。包封在前照灯内的头灯的类型包括卤素、氙气、高强度放电(hid)、发光二极管(led)、红外线和激光。一些头灯的设置包括提供额外光并照射更大区域的远光灯、向前和向下指向以避免过度眩光的近光灯或会车灯、允许道路上的其他驾驶员检测的日间行车灯以及被设计为穿透雾气同时避免光反射回驾驶员的雾灯。半自主或自主车辆中的前照灯充当驾驶员的眼睛。
技术实现思路
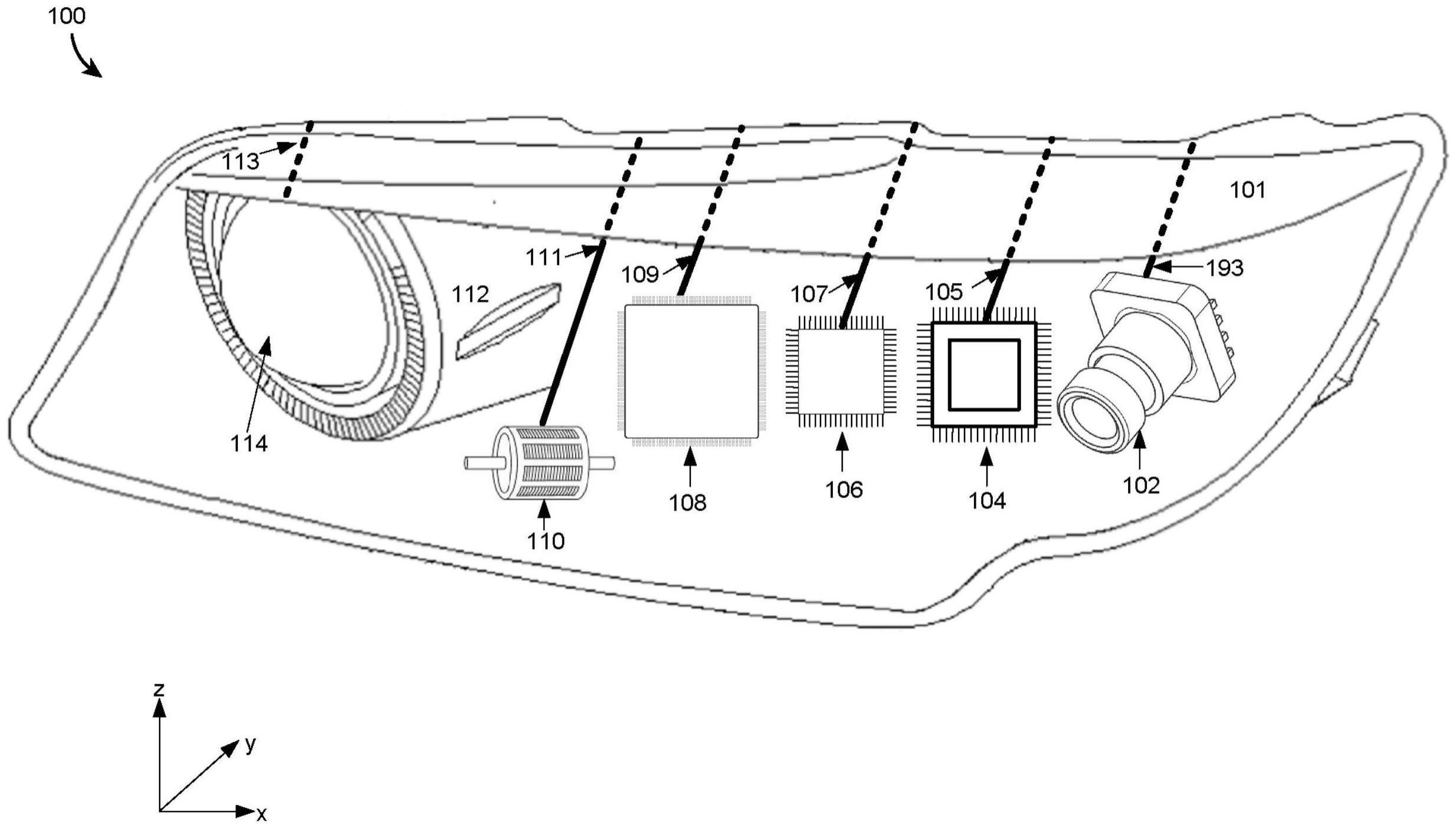
1、在一些实施例中,本文描述了一种前照灯组件,所述前照灯组件包括壳体,所述壳体包封:传感器,所述传感器获取与周围环境相关联的数据;光源,所述光源照射周围环境的一部分;以及一个或多个处理器,所述一个或多个处理器分析获取的数据并基于经分析的数据确定照明的方向、视场、强度和/功率。在一些实施例中,一个或多个处理器可以基于经分析的数据确定照明的方向、强度、视场和/或功率的变化。在一些实施例中,功率可以指示照明的开状态或关状态。
2、在一些实施例中,一个或多个处理器可以包括:人工智能(ai)处理器,所述ai处理器:分析获取的数据并且基于经分析数据确定照明的方向、视场、强度或功率;控制器芯片,所述控制器芯片控制照明的方向、视场、强度和/或功率。在一些实施例中,前照灯组件还可以包括:图像信号处理器(isp),所述isp在ai处理器分析获取的数据之前转换来自传感器的获取的数据;以及共同总线,所述共同总线将来自ai处理器的数据传输到控制器芯片。
3、在一些实施例中,isp可以与ai处理器一起集成在芯片上。换句话说,isp和ai处理器可以集成或组合在同一芯片上。
4、在一些实施例中,前照灯组件还可以包括:第二光源,所述第二光源照射周围环境的第二部分。前照灯组件还可以包括:一个或多个第二处理器,所述一个或多个第二处理器:分析获取的数据;基于经分析的数据确定第二部分的照明的第二方向、第二视场、第二强度和/或第二功率;并且基于经确定的第二方向、第二视场、经确定的第二强度和/或第二功率来控制第二方向、第二视场、第二强度和/或第二功率。在一些实施例中,一个或多个第二处理器可以基于经分析的数据确定第二部分的照明的第二方向、第二视场、第二强度和/或第二功率的变化。一个或多个处理器可以基于经确定方向和经确定的第二方向的加权平均值、经确定视场和经确定的第二视场的加权平均值、经确定的强度和经确定的第二强度的加权平均值和/或经确定的功率和经确定的第二功率的加权平均值来调节经确定的方向、经确定的视场、经确定的强度和/或经确定的功率。
5、在一些实施例中,isp可以与传感器一起集成在芯片(例如,第二芯片)上,并且ai处理器与控制器芯片一起集成在第三芯片上。
6、在一些实施例中,一个或多个处理器可以包括:人工智能(ai)处理器,所述ai处理器:分析获取的数据以确定一个或多个对象的存在;并且基于一个或多个对象的经确定的存在来确定要应用到照明的方向或视场的高度变化。在一些实施例中,一个或多个处理器可以另外包括:控制器芯片,所述控制器芯片基于视场中的经确定的高度变化来改变方向或视场。
7、在一些实施例中,一个或多个处理器可以包括:人工智能(ai)处理器,所述ai处理器:获得或确定安装有前照灯组件的车辆正在行驶的道路的当前坡度或预测坡度;并且基于道路的当前坡度或预测坡度来确定要应用到方向或视场的高度变化。一个或多个处理器可以包括:控制器芯片,所述控制器芯片基于视场的经确定的高度变化来改变方向或视场。
8、在一些实施例中,ai处理器可以:预测道路的坡度包括向上坡度;并且响应于预测坡度而确定要应用到方向或视场的向上变化。
9、在一些实施例中,一个或多个处理器可以包括:人工智能(ai)处理器,所述ai处理器:获得或确定安装有前照灯组件的车辆正在行驶的道路的当前国际糙度指数(iri)或预测iri;并且基于当前iri或预测iri确定要应用到方向或视场的高度变化。一个或多个处理器可以包括:控制器芯片,所述控制器芯片基于方向或视场的经确定的高度变化改变方向或视场。
10、在一些实施例中,一个或多个处理器可以:确定预测iri至少为阈值;并且响应于预测iri而确定要应用到方向或视场的向下变化。
11、在一些实施例中,一个或多个处理器可以包括:人工智能(ai)处理器,所述ai处理器:分析获取的数据以确定一个或多个对象的存在;并且基于一个或多个对象的经确定的存在来确定要应用到照明的方向或视场的横向变化。一个或多个处理器可以包括:控制器芯片,所述控制器芯片基于方向或视场中的经确定的横向变化来改变方向或视场。
12、在一些实施例中,ai处理器可以:确定或获得组装有前照灯组件的车辆的当前方向或计划方向;分析获取的数据以确定在与当前方向或计划方向的相反方向上并且在由光源照射的当前视场内移动的对象的存在;并且确定要应用到当前视场的横向变化,使得经改变的视场不再包含对象。在一些实施例中,控制器芯片可以基于视场的经确定的横向变化改变当前视场。
13、在一些实施例中,ai处理器可以:确定或获得安装或装配有前照灯组件的车辆的当前方向或计划方向;分析获取的数据以确定或预测在由光源照射的当前视场之外、但在当前方向或计划方向的阈值距离内的对象的存在;并且确定要应用到当前视场以包含对象的横向变化,所述对象例如可以被预测为行人。在一些实施例中,控制器芯片可以基于当前视场的经确定的横向变化改变当前视场。
14、在一些实施例中,ai处理器可以:确定或获得组装有前照灯组件的车辆的当前速度或预测速度;基于当前速度或预测速度确定车辆的操作状态;并且基于经确定的操作状态来确定要应用到方向或视场的横向变化。在一些实施例中,控制器芯片可以基于方向或视场的经确定的横向变化来改变方向或视场。
15、在一些实施例中,光源可以包括一个或多个光束。一个或多个处理器可以包括:人工智能(ai)处理器,所述ai处理器分析获取的数据以确定对象的存在,并且基于对象的经确定的存在来确定要应用到一个或多个光束的电压的变化。一个或多个处理器可以包括:控制器芯片,所述控制器芯片基于电压的经确定的变化来控制应用到一个或多个光束的电压。
16、在一些实施例中,ai处理器可以:确定对象是否正在朝向前照灯组件移动;并且响应于确定对象正在朝向前照灯组件移动,确定降低要应用到一个或多个光束的电压。
17、在一些实施例中,一个或多个处理器可以包括:人工智能(ai)处理器,所述ai处理器通过分析获取的数据来确定传感器的一个或多个部件的灰尘浓度或微粒浓度。一个或多个处理器可以包括:控制器芯片,所述控制器芯片基于经确定的灰尘浓度或微粒浓度来控制清洁器的操作。前照灯组件还可以包括清洁器,所述清洁器被配置为基于灰尘浓度或微粒浓度来清洁传感器的一个或多个部件。
18、在一些实施例中,一个或多个处理器还可以基于经分析的数据确定照明的占空比。
19、本公开的各种实施例提供了由如上所述的系统实现的方法。
- 还没有人留言评论。精彩留言会获得点赞!