一种照明角度可调节的LED路灯及其节能照明系统的制作方法
一种照明角度可调节的led路灯及其节能照明系统
技术领域
1.本发明属于节能照明技术领域,具体为一种照明角度可调节的led路灯及其节能照明系统。
背景技术:
2.路灯是路上最常用的照明灯具,现有的路灯多是采用传统光源,能耗大,寿命短,随着led照明技术的发展,越来越多的路灯采用了led灯作为光源进行照明,目前,led路灯的使用大多为一体式设计,无法有效调节其光照角度,影响使用效果,进一步的,led路灯的控制方式多为人工控制或定时控制,无法根据天气情况或外界自然光情况自动调节led路灯的光照强度,无法有效进一步降低led路灯的能耗,从而造成电能浪费,节能效果并不理想。
3.有鉴于此,提供一种照明角度可调节的led路灯及其节能照明系统来解决上述问题。
技术实现要素:
4.(一)解决的技术问题
5.为了克服现有技术的上述缺陷,本发明提供了一种照明角度可调节的led路灯及其节能照明系统,解决了led路灯的使用大多为一体式设计,无法有效调节其光照角度,影响使用效果,进一步的,led路灯的控制方式多为人工控制或定时控制,无法根据天气情况或外界自然光情况自动调节led路灯的光照强度,无法有效进一步降低led路灯的能耗,从而造成电能浪费的问题。
6.(二)技术方案
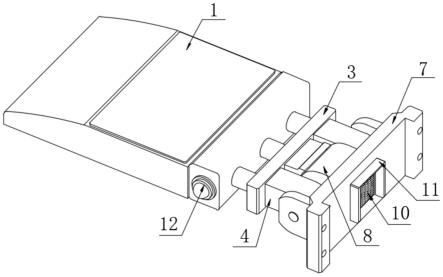
7.为实现上述目的,本发明提供如下技术方案:一种照明角度可调节的led路灯,包括灯罩和节能照明系统,所述灯罩内设有led灯体,所述灯罩的一侧通过连接板与两个立柱固定连接,两个立柱设置在两个挡板内,两个挡板的一侧与安装板固定连接,所述安装板靠近连接板的一侧固定连接有盒体,所述盒体内通过两个轴套与连接轴的表面套接,所述连接轴外卡接有角度调节机构,所述角度调节机构设置在安装板内,所述安装板的另一侧对应调节机构的位置安装有防护罩,所述角度调节机构靠近防护罩的一侧设有散热板,所述散热板卡接在安装板上。
8.作为本发明的进一步方案:所述角度调节机构包括电机,所述电机设置在安装板内,所述电机的输出轴固定连接有主动齿轮,所述主动齿轮与从动齿轮相互啮合,所述从动齿轮卡接在连接轴的表面。
9.一种照明角度可调节的led路灯的节能照明系统,所述节能照明系统由采集模块、光照强度自适应调节模型、光照强度自适应控制模块、控制器和微处理器组成。
10.作为本发明的进一步方案:所述采集模块的输出端与光照强度自适应调节模型的输入端连接,所述光照强度自适应调节模型的输出端与光照强度自适应控制模块的输入端
连接,所述光照强度自适应控制模块的输出端与控制器的输入端连接,所述控制器的输入端与微处理器的输出端连接,所述微处理器与光照强度自适应控制模块和光照强度自适应调节模型双向连接。
11.作为本发明的进一步方案:所述采集模块包括光敏传感器和a/d转换模块。
12.光敏传感器:用于采集自然光照信息。
13.a/d转换模块:用于对光敏传感器采集的光照数据进行a/d转换,得到自然光照强度数据信息。
14.作为本发明的进一步方案:所述光照强度自适应调节模型用于利用自然光补偿led路灯光照,使led光照与自然光照之和维持在一恒定水平,实现led路灯最大限度节能,使led光照随着自然光强度自适应调节。
15.作为本发明的进一步方案:所述光照强度自适应控制模块包括逆模型和自适应控制模型。
16.所述光照强度自适应调节模型的建立方式如下:
17.设led光照与自然光照之和,即补偿后的输出为c0,当前自然光光照强度为y(t),led路灯需提供的光照强度,即目标光照强度为x(t),则:
18.x(t)=c
0-y(t)
ꢀꢀꢀ
(1)
19.式中,t为时间变量。
20.逆模型:用于将光照强度自适应调节模型中得到t时刻的目标光照强度x(t),再通过光照测量逆模型,求得相应的控制电压u,即得到led路灯的光照强度。
21.所述逆模型的建立方式如下:
22.a、首先将x为光照测量逆模型的输入,f1为隐含层传输函数,采用logsig函数表示,即ω=(ω1,ω2,...,ωm)
t
为输入层、隐含层的权值,b
(1)
=(b
1(1)
,b
2(1)
,...,b
m(1)
)
t
为隐含层的偏置值,v=(v1,v2,...,vm)
t
为隐含层、输出层权值,b
(2)
为输出层偏置值,u为光照测量逆模型的输出,即:
[0023][0024]
式中,隐含层神经元的个数m由实验确定,aj为隐含层第j个神经元的输出,即:
[0025][0026]
b、对逆模型进行神经网络训练,设神经网络训练模型的目标函数为e,采用批量训练法,即n个训练样本,则:
[0027][0028]
式中:
[0029]
[0030]
由于0<aj<1,因此,约束条件式(5)简化为:
[0031][0032]
因此,式(4)调整为:
[0033][0034]
且j=1,2,...,m;i=1,2,...,n
[0035]
利用乘子法求(7)的最优解,构造增广目标函数φ(ω,b
(1)
,v,b
(2)
,λ,σ)为:
[0036][0037]
式中,λ为乘子,σ为惩罚参数
[0038][0039]
c、采用批量训练法,利用平均梯度更新神经网络的参数,考虑学习率η影响,则神经网络参数ωj、vj、b
(2)
的迭代式为:
[0040][0041]
(9)
[0042]
式中:
[0043][0044]
根据乘子法,式(9)中乘子λj的迭代公式为:
[0045][0046]
自适应控制模型:用于根据自然光强度大小,判断led路灯是否全功率工作,设置调控策略,实现led光照自适应调节的目的。
[0047]
所述自适应控制模型的建立方式如下:
[0048]
设z(x)为led路灯光照强度的自适应控制函数,则:
[0049][0050]
式中,c
max
为led的最大控制量,ln为自然光照强度,la为启动led自适应调节的阈值,lb为关闭led自适应调节的阈值,la、lb的值根据led路灯应用环境的要求进行设置。
[0051]
其次利用微处理器pwm功能,获得led路灯光照强度调节量,即pwm控制量,控制路灯驱动芯片,完成led路灯亮度调节,将z(x)转换为pwm的占空比,具体为:
[0052][0053]
式中,当z
pwm
(x)=0时,pwm的占空比为0,此时led驱动电流为0,led路灯不工作,当z
pwm
(x)=ffffh时,pwm的占空比为1,此时led驱动电流最大,led路灯全功率工作。
[0054]
作为本发明的进一步方案:所述控制器用于控制角度调节机构实现对led路灯进行仰角调节的目的。
[0055]
所述控制器的具体应用方式为:
[0056]
当led路灯led驱动电流最大,led路灯全功率工作时,控制器控制角度调节机构工作,增加仰角角度,扩大led路灯照明范围。
[0057]
(三)有益效果
[0058]
与现有技术相比,本发明的有益效果在于:
[0059]
1、本发明中,通过以led路灯光照测量输出电压与光照强度之间函数关系的单调递增性为先验信息,构造基于神经网络的led光照测量逆模型的训练约束条件,并利用乘子法构建作为训练的目标函数,给出详细的训练算法,完成神经网络优化设计,利用微处理器pwm功能,获得led路灯光照强度调节量,控制路灯驱动芯片,完成led路灯自适应亮度的调节,因而led路灯可根据外界自然光情况自动调节led路灯的光照强度,其次,当led路灯led驱动电流最大,led路灯全功率工作时,控制器控制角度调节机构工作,增加仰角角度,扩大led路灯照明范围,提高了led路灯光照强度自适应控制的泛化能力。
[0060]
2、本发明中,通过设置角度调节机构对灯罩及led灯体的角度进行调节,并且通过控制器进行智能控制,提高该led路灯的使用效果,进一步的,本技术中角度调节机构安装于安装板和盒体内部,防止因外界环境影响对角度调节机构造成损伤,配合散热板对电机进行散热处理并且通过防护罩进行防水,大大提高角度调节机构的使用效果。
附图说明
[0061]
图1为本发明立体的结构示意图;
[0062]
图2为本发明仰视的结构示意图;
[0063]
图3为本发明盒体剖面的结构示意图;
[0064]
图4为本发明节能照明系统的示意框图;
[0065]
图中:1、灯罩;2、led灯体;3、连接板;4、立柱;5、连接轴;6、挡板;7、安装板;8、盒体;9、角度调节机构;91、从动齿轮;92、主动齿轮;93、电机;10、散热板;11、防护罩;12、节能
照明系统。
具体实施方式
[0066]
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
[0067]
如图1-4所示,本发明提供一种技术方案:一种照明角度可调节的led路灯,包括灯罩和节能照明系统,灯罩内设有led灯体,灯罩的一侧通过连接板与两个立柱固定连接,两个立柱设置在两个挡板内,两个挡板的一侧与安装板固定连接,安装板靠近连接板的一侧固定连接有盒体,盒体内通过两个轴套与连接轴的表面套接,连接轴外卡接有角度调节机构,角度调节机构设置在安装板内,安装板的另一侧对应调节机构的位置安装有防护罩,角度调节机构靠近防护罩的一侧设有散热板,散热板卡接在安装板上。
[0068]
角度调节机构包括电机,电机设置在安装板内,电机的输出轴固定连接有主动齿轮,主动齿轮与从动齿轮相互啮合,从动齿轮卡接在连接轴的表面。
[0069]
一种照明角度可调节的led路灯的节能照明系统,节能照明系统由采集模块、光照强度自适应调节模型、光照强度自适应控制模块、控制器和微处理器组成。
[0070]
采集模块的输出端与光照强度自适应调节模型的输入端连接,光照强度自适应调节模型的输出端与光照强度自适应控制模块的输入端连接,光照强度自适应控制模块的输出端与控制器的输入端连接,控制器的输入端与微处理器的输出端连接,微处理器与光照强度自适应控制模块和光照强度自适应调节模型双向连接。
[0071]
采集模块包括光敏传感器和a/d转换模块。
[0072]
光敏传感器:用于采集自然光照信息。
[0073]
a/d转换模块:用于对光敏传感器采集的光照数据进行a/d转换,得到自然光照强度数据信息。
[0074]
光照强度自适应调节模型用于利用自然光补偿led路灯光照,使led光照与自然光照之和维持在一恒定水平,实现led路灯最大限度节能,使led光照随着自然光强度自适应调节。
[0075]
光照强度自适应控制模块包括逆模型和自适应控制模型。
[0076]
光照强度自适应调节模型的建立方式如下:
[0077]
设led光照与自然光照之和,即补偿后的输出为c0,当前自然光光照强度为y(t),led路灯需提供的光照强度,即目标光照强度为x(t),则:
[0078]
x(t)=c
0-y(t)
ꢀꢀꢀ
(1)
[0079]
式中,t为时间变量。
[0080]
逆模型:用于将光照强度自适应调节模型中得到t时刻的目标光照强度x(t),再通过光照测量逆模型,求得相应的控制电压u,即得到led路灯的光照强度。
[0081]
逆模型的建立方式如下:
[0082]
a、首先将x为光照测量逆模型的输入,f1为隐含层传输函数,采用logsig函数表示,即ω=(ω1,ω2,...,ωm)
t
为输入层、隐含层的权值,b
(1)
=(b
1(1)
,b
2(1)
,...,b
m(1)
)
t
为隐含层的偏置值,v=(v1,v2,...,vm)
t
为隐含层、输出层权值,b
(2)
为输出层偏置值,u为光照测量逆模型的输出,即:
[0083][0084]
式中,隐含层神经元的个数m由实验确定,aj为隐含层第j个神经元的输出,即:
[0085][0086]
b、对逆模型进行神经网络训练,设神经网络训练模型的目标函数为e,采用批量训练法,即n个训练样本,则:
[0087][0088]
式中:
[0089][0090]
由于0<aj<1,因此,约束条件式(5)简化为:
[0091][0092]
因此,式(4)调整为:
[0093][0094]
且j=1,2,...,m;i=1,2,...,n
[0095]
利用乘子法求(7)的最优解,构造增广目标函数φ(ω,b
(1)
,v,b
(2)
,λ,σ)为:
[0096][0097]
式中,λ为乘子,σ为惩罚参数
[0098][0099]
c、采用批量训练法,利用平均梯度更新神经网络的参数,考虑学习率η影响,则神经网络参数ωj、vj、b
(2)
的迭代式为:
[0100][0101]
式中:
[0102][0103]
根据乘子法,式(9)中乘子λj的迭代公式为:
[0104][0105]
自适应控制模型:用于根据自然光强度大小,判断led路灯是否全功率工作,设置调控策略,实现led光照自适应调节的目的。
[0106]
自适应控制模型的建立方式如下:
[0107]
设z(x)为led路灯光照强度的自适应控制函数,则:
[0108][0109]
式中,c
max
为led的最大控制量,ln为自然光照强度,la为启动led自适应调节的阈值,lb为关闭led自适应调节的阈值,la、lb的值根据led路灯应用环境的要求进行设置。
[0110]
其次利用微处理器pwm功能,获得led路灯光照强度调节量,即pwm控制量,控制路灯驱动芯片,完成led路灯亮度调节,将z(x)转换为pwm的占空比,具体为:
[0111][0112]
式中,当z
pwm
(x)=0时,pwm的占空比为0,此时led驱动电流为0,led路灯不工作,当z
pwm
(x)=ffffh时,pwm的占空比为1,此时led驱动电流最大,led路灯全功率工作。
[0113]
控制器用于控制角度调节机构实现对led路灯进行仰角调节的目的。
[0114]
控制器的具体应用方式为:
[0115]
当led路灯led驱动电流最大,led路灯全功率工作时,控制器控制角度调节机构工作,增加仰角角度,扩大led路灯照明范围。
[0116]
综上所得:
[0117]
通过以led路灯光照测量输出电压与光照强度之间函数关系的单调递增性为先验信息,构造基于神经网络的led光照测量逆模型的训练约束条件,并利用乘子法构建作为训
练的目标函数,给出详细的训练算法,完成神经网络优化设计,利用微处理器pwm功能,获得led路灯光照强度调节量,控制路灯驱动芯片,完成led路灯自适应亮度的调节,因而led路灯可根据外界自然光情况自动调节led路灯的光照强度,其次,当led路灯led驱动电流最大,led路灯全功率工作时,控制器控制角度调节机构工作,增加仰角角度,扩大led路灯照明范围,提高了led路灯光照强度自适应控制的泛化能力。
[0118]
通过设置角度调节机构对灯罩及led灯体的角度进行调节,并且通过控制器进行智能控制,提高该led路灯的使用效果,进一步的,本技术中角度调节机构安装于安装板和盒体内部,防止因外界环境影响对角度调节机构造成损伤,配合散热板对电机进行散热处理并且通过防护罩进行防水,大大提高角度调节机构的使用效果。
[0119]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
[0120]
上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1