一种APF控制系统的三相电网电压锁相环的制作方法
一种apf控制系统的三相电网电压锁相环
技术领域
1.本发明涉及电力电子控制技术领域,具体涉及一种apf控制系统的三相电网电压锁相环。
背景技术:
2.在有源电力滤波器(apf)等需要并网的电力电子装置控制中,获得电网电压的相位是系统控制的前提,一般采用锁相环(pll)来获取电网电压的相位。锁相环一般由鉴相器(pd)、环路滤波器(lf)、压控振荡器(vco)组成。锁相环是一个相位反馈系统。鉴相器把周期性的输入信号与vco反馈来的相位信号进行比较,得到一个相位误差;误差经环路滤波器进行滤波,环路滤波器的输出被用作控制信号送入vco,用来消除输入、输出信号的相位差。并网逆变器在工程应用中经常因面临以下问题,而带对逆变器性能具有以下要求:
3.(1)电网电压经常发生跌落、闪变等动态电能质量问题,所以要求逆变器能够对电网电压相位的变换在ms级的时间内做出快速的响应,即要求逆变器的锁相方法要有良好的动态性能,保证当电压跌落和骤升时不对锁相性能造成太大影响。
4.(2)三相电压不平衡时,要求电力电子装置的锁相方法能够捕获正序基波分量的相位,对三相不平衡情况有很强的抑制作用。
5.(3)锁相环应该能快速检测到电网电压发生相位、频率突变等问题。
6.(4)要求锁相方法对畸变电压要有很强的抑制作用。
技术实现要素:
7.针对本领域存在的技术问题,本发明公开了一种apf控制系统的三相电网电压锁相环,所述三相电网电压锁相环由两个锁相环控制器组成;每个所述锁相环控制器包括:q轴分量换算模块和比例积分算法模块;
8.其中,所述q轴分量换算模块配置为:
9.获取d轴分量电压vd和q轴分量电压vq;
10.计算所述q轴分量电压vq相对于所述d轴分量电压vd的模的比值k;
11.将所述比值k发送至所述比例积分算法模块;
12.所述锁相环控制器采用包括第一park模块、低通滤波器、第二park模块、压控振荡器,对clark变换后的vα和vβ进行前馈解耦计算,输出基波正序分量和基波负序分量的幅值、相位角θ和角频率ω;
13.所述前馈解耦计算包括以下步骤:
14.所述vα和vβ经过所述第一park模块的park变换得到d轴分量电压vd和q轴分量电压vq;
15.所述vd和vq分别通过所述低通滤波器滤除高频谐波,得到v
′
d和v
′
q,并一同发送至所述第二park模块;
16.所述q轴分量电压vq和所述比值k一同发送至所述比例积分算法模块,
17.所述比例积分算法模块计算角频率ω并输出给所述压控振荡器;
18.所述角频率ω经过所述压控振荡器的积分处理得到相位角θ;
19.将所述相位角θ作为反馈信号发送至所述第一park模块;
20.将所述相位角θ作为参数发送至所述第二park模块;
21.所述第二park模块将所述v
′
d和v
′
q进行park逆变换,得到α轴和β轴的基波正序分量幅值或α轴和β轴的基波负序分量幅值。
22.相对现有技术,本发明的优势在于:当电压发生频率、相位突变时,能够快速、准确地重新锁定相位;能够快速滤除三相电压中的低次谐波,尤其是不平衡电网电压经过dq变换后产生的二次谐波;当遇到两相跌落故障时,本发明可以在较短时间内快速检测到电网电压正序和负序分量的幅值、相位角和角频率;在并网工程中具有良好的可靠性。
附图说明
23.图1、一些三相电网电压锁相环的原理图;
24.图2、一些实施方式的三相电网电压锁相环的原理图;其中输入的信号分别为vα和vβ,输出的信号分别基波正序分量vαp、vβp,和基波负序分量vαn、vβn
25.图3、一些实施方式的三相电网电压锁相环的原理图;其中输入的信号分别为vα和vβ,输出的信号分别基波正序分量vαp、vβp,和基波负序分量vαn、vβn
26.图4、一些实施方式的三相电网电压锁相环的原理图;其中输入的信号分别为vα和vβ,输出的信号分别基波正序分量vαp、vβp,和基波负序分量vαn、vβn
27.图5、一些基于sallen key拓扑结构的巴特沃斯滤波器原理图;其中,ra和rb表示滤波器中的电阻,ca和cb表示滤波电容器;
28.图6、一些实施方式的开环频率特征图(幅度),hz为频率单位,bd为幅度单位;
29.图7、一些实施方式的开环频率特征图(相位),hz为频率单位,deg为相位单位;
30.图8、一些电网工作状态下的电网电压矢量图,vg为电网电压,vs、vr、vt为电网电压的abc三相分量,vd和vq为电网电压的d、q轴分量,θ为相位角;
31.图9、一些实施方式的apf控制系统结构示意图。
具体实施方式
32.下面结合附图解释本发明。
33.一些相关技术中的三相电网电压锁相环,包括两个锁相环控制器;每个锁相环控制器的原理如图1中所示,包括q轴分量换算模块和pi算法模块;其中,q轴分量换算模块配置为:
34.获取d轴分量电压vd和q轴分量电压vq;
35.计算q轴分量电压vq相对于d轴分量电压vd的模的比值k;
36.将比值k发送至pi算法模块。
37.需要说明的是,在pi算法模块中进行的计算如下式:
38.39.其中,kp表示比例增益,ki表示积分增益。
40.一些实施方式的三相电网电压锁相环如图2所示,包括两个锁相环控制器,第一锁相环控制器与第二锁相环控制器交叉耦合:
41.其中,第一锁相环控制器被配置为:
42.第一park模块通过正序park变换算法处理电网电压信号vα和vβ,得到d轴分量电压正序分量vdp和q轴分量电压正序分量vqp;低通滤波器将vdp滤波得到v’dp,将vqp滤波得到v’qp;第二park模块通过正序park反变换算法处理v’dp和v’qp得到α轴电压信号正序分量vαp和β轴电压信号正序分量vβp;
43.第二锁相环控制器被配置为:
44.第一park模块通过负序park变换算法处理电网电压信号vα和vβ,得到d轴分量电压负序分量vdn和q轴分量电压负序分量vqn;低通滤波器将vdn滤波得到v’dn,将vqn滤波得到v’qn;第二park模块通过负序park反变换算法处理v’dn和v’qn得到α轴电压信号负序分量vαn和β轴电压信号负序分量vβn。
45.一些实施方式的三相电网电压锁相环如图3所示,由两个锁相环控制器组成;每个所述锁相环控制器包括:q轴分量换算模块和比例积分算法模块;
46.其中,所述q轴分量换算模块配置为:
47.获取d轴分量电压vd和q轴分量电压vq;
48.计算所述q轴分量电压vq相对于所述d轴分量电压vd的模的比值k;
49.将所述比值k发送至所述比例积分算法模块;
50.所述锁相环控制器采用包括第一park模块、低通滤波器、第二park模块、压控振荡器,对clark变换后的vα和vβ进行前馈解耦计算,输出基波正序分量和基波负序分量的幅值、相位角θ和角频率ω。
51.更具体的实施方式,两个锁相环控制器中的:
52.第一锁相环控制器被用于输出α轴基波正序分量vαp和β轴vβp的幅值、相位角θ和角频率ω;
53.第二锁相环控制器被用于输出α轴基波负序分量vαn和β轴vβn的幅值、相位角θ和角频率ω。
54.所述第一锁相环控制器与所述第二锁相环控制器交叉耦合,该交叉耦合的方式为:
55.所述第一锁相环控制器输出的所述α轴基波正序分量vαp作为所述第二锁相环控制器的第一反馈信号,
56.所述第一锁相环控制器输出的所述β轴基波正序分量vβp作为所述第二锁相环控制器的第二反馈信号;
57.所述第二锁相环控制器输出的所述α轴基波负序分量vαn作为所述第一锁相环控制器的第一反馈信号,
58.所述第二锁相环控制器输出的所述β轴基波负序分量vβn作为所述第二锁相环控制器的第二反馈信号。
59.一些实施方式的前馈解耦计算包括以下步骤:
60.所述vα和vβ经过所述第一park模块的park变换得到d轴分量电压vd和q轴分量电
压vq;
61.所述vd和vq分别通过所述低通滤波器滤除高频谐波,得到v
′
d和v
′
q,并一同发送至所述第二park模块;
62.所述q轴分量电压vq和所述比值k一同发送至所述比例积分算法模块,
63.所述比例积分算法模块计算角频率ω并输出给所述压控振荡器;
64.所述角频率ω经过所述压控振荡器的积分处理得到相位角θ;
65.将所述相位角θ作为反馈信号发送至所述第一park模块;
66.将所述相位角θ作为参数发送至所述第二park模块;
67.所述第二park模块将所述v
′
d和v
′
q进行park逆变换,得到α轴和β轴的基波正序分量幅值或α轴和β轴的基波负序分量幅值。
68.一些实施方式的q轴分量换算模块计算k值的公式如下:
[0069][0070]
其中,vq表示q轴分量电压,vd表示d轴分量电压,vq与vd都是矢量(向量),对vd取模;表示相位角的差;
[0071]
一些实施方式的三相电网电压锁相环如图4,输入端包括clark模块,所述clark模块将三相电网电压va、vb、vc经过简化的clark变换得到所述vα和vβ,所述简化的clark变换与clark变换的区别在于:当q轴分量vq趋近于0情况下,可以将以上公式进一步简化:
[0072][0073]
使用所述vα和所述vβ的相位差代替该相位差的正弦三角函数值。该简化的clark变换可以保证相位差较小的情况下运算速度。
[0074]
一些实施方式中包括如图3-4所示的一阶低通滤波器和陷波器nf,根据apf控制系统中的滤波器选择模块给锁相环控制器下发用于控制所述低通滤波器和/或陷波器通断状态的指令,进而采用包括以下任何一种方式的处理步骤:首先用低通滤波器滤除高次谐波,再用二阶陷波器滤除二次谐波;用低通滤波器或二阶陷波器中的一种滤波器进行滤波。
[0075]
比例积分算法模块配置参数为:开关频率为30khz;截止频率为30khz;相位裕度为45deg。
[0076]
一些实施方式的低通滤波器包括一阶或高阶巴特沃斯滤波器,所述一阶巴特沃斯滤波器的截止频率为10hz。
[0077]
一些实施方式的一阶或高阶巴特沃斯滤波器为如图5的基于sallen key拓扑结构的巴特沃斯滤波器。sallen-key滤波是一种基于运算放大器阶段简单的有源滤波器,这种配置对运算放大器的性能的过滤器性能的依赖性最小。这种结构的另一个优势是,最大电阻值最小的电阻值和电容值的最大最小电容值的比例很低,这是很好的工艺性。
[0078]
一些实施方式,开环频率特征如图6-7。
[0079]
需要说明的是,固定的比例积分参数(pi参数)很难在所有实施方式中都取得良好的控制效果,因此优选的采用变化的pi参数。在一些需要用到速度环(位置伺服系统或速度伺服系统)的实施方式下,电流环只是最内部的一个环,其pi参数一般可以根据速度误差(不是电流本身的误差)来动态的调节,在误差小时增大pi参数,误差大时减小pi参数,在只
有一个纯力矩环的实施方式中,可以根据力矩指令本身的大小来动态调整pi参数,力矩指令大时减小pi参数,力矩指令小时增大pi参数。
[0080]
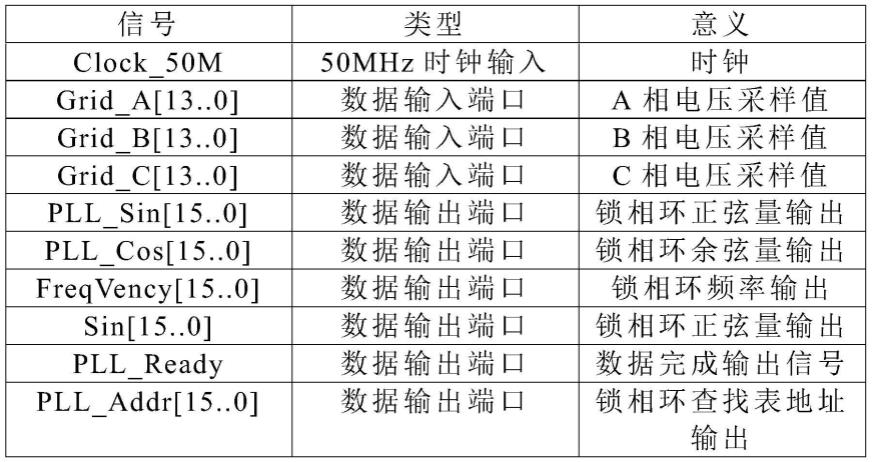
更具体的实施方式,采用现场可编程门阵列(fpga)实现三相电网电压锁相环,充分发挥fpga硬件的高性能。基于将电网电压d轴分量收敛于三相电网电压综合矢量上,使电网电压q轴分量趋近于0;鉴于实际电网工况,需要将电网电压中正序分量与负序分量分离以达到锁相输出角度精确反映电网电压基波正序相角,电网电压的矢量图如图8所示。
[0081]
fpga电网电压锁相环模块的顶层实体中的信号定义见下表:
[0082]
表1.fpga电网电压锁相环模块顶层实体的信号定义
[0083][0084]
该锁相环模块主要有数据采集模块、clark变换模块、误差计算模块、pi算法模块组成。
[0085]
一些实施方式的apf控制系统,其结构如图9,包括以上实施方式中的任一种锁相环控制器。
[0086]
本说明书中描述的主题的实施方式和功能性操作可以在以下中实施:数字电子电路,有形实施的计算机软件或者固件,计算机硬件,包括本说明书中公开的结构及其结构等同体,或者上述中的一者以上的组合。数据处理设备包含所有种类的用于处理数据的设备、装置以及机器,作为实例,包括可编程处理器、计算机或者多重处理器或者多重计算机。设备可以包括专用逻辑电路,例如,fpga(现场可编程门阵列)或者asic(专用集成电路)。设备除了包括硬件之外,还可以包括创建相关计算机程序的执行环境的代码,例如构成处理器固件、协议栈、数据库管理系统、操作系统或者它们中的一种或多种的组合代码。
[0087]
在本说明书中描述的处理和逻辑流程可以由一个或多个可编程计算机执行,该计算机通过运算输入数据并且生成输出而执行一个或多个的计算机程序,以运行函数。处理和逻辑流程还可以由专用逻辑电路,例如,fpga(可现场编程门阵列)或者asic(专用集成电路)执行,并且设备也可以被实施为专用逻辑电路。
[0088]
虽然本说明书包含很多具体的实施细节,但是这些不应当被解释为对任何发明的范围或者对可以要求保护的内容的范围的限制,而是作为可以使特定发明的特定实施方式具体化的特征的说明。在独立的实施方式的语境中的本说明书中描述的特定特征还可以与
单个实施方式组合地实施。相反地,在单个实施方式的语境中描述的各种特征还可以独立地在多个实施方式中实施,或者在任何合适的子组合中实施。此外,虽然以上可以将特征描述为组合作用并且甚至最初这样要求,但是来自要求的组合的一个或多个特征在一些情况下可以从该组合去掉,并且要求的组合可以转向子组合或者子组合的变形。
[0089]
相似地,虽然以特定顺序在附图中描述了操作,但是不应当理解为:为了实现期望的结果,要求这样的操作以示出的特定顺序或者以顺序次序而执行,或者所有图示的操作都被执行。在特定情况下,多任务处理和并行处理可以是有利的。此外,上述实施方式中的各种系统模块和组件的分离不应当理解为在所有实施方式中要求这样的分离,并且应当理解程序组件和系统可以通常被一体化在单个软件产品中或者打包至多个软件产品中。
[0090]
已经描述了主题的特定实施方式。其他实施方式在以下权利要求的范围内。例如,在权利要求中记载的活动可以以不同的顺序执行并且仍旧实现期望的结果。作为一个实例,为了实现期望的结果,附图中描述的处理不必须要求示出的特定顺序或者顺序次序。在特定实现中,多任务处理和并行处理可以是有优势的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1