带智能识别系统的像素工作灯及其智能识别控制方法与流程
本发明属于行车照明技术,尤其涉及带智能识别系统的像素工作灯及其智能识别控制方法。
背景技术:
1、智能驾驶技术日新月异,已为人们的驾驶带来便利以及为无人驾驶提供可能。目前,智能驾驶技术主要集中在行进避障、速度控制、车道监测、紧急制动等方面的研究,而车灯控制方面还停留于较为原始的自动控制方式,即根据光暗来开关主车灯等,存在较大的改良空间。实际上,人们在驾驶中往往是甚少关注车灯控制的,甚至有人并不清楚如何开关远光灯或者不会时刻在意远光灯的状态,为夜间行车、会车带来隐患,因此,车灯照明控制关乎行车视野和行车安全,人们更希望车辆搭载一套能够自主判断与控制车灯、保证行车视野的智能化车灯系统,此需求亟待解决。
技术实现思路
1、本发明提出一种带智能识别系统的像素工作灯及其智能识别控制方法,实现行车状态的智能识别及车灯光效的自动调节,其具体采用以下技术手段实现:
2、本发明的带智能识别系统的像素工作灯,其包括主控制单元、调光控制模块、单点可控灯光模块、速度传感器以及环境识别传感器;
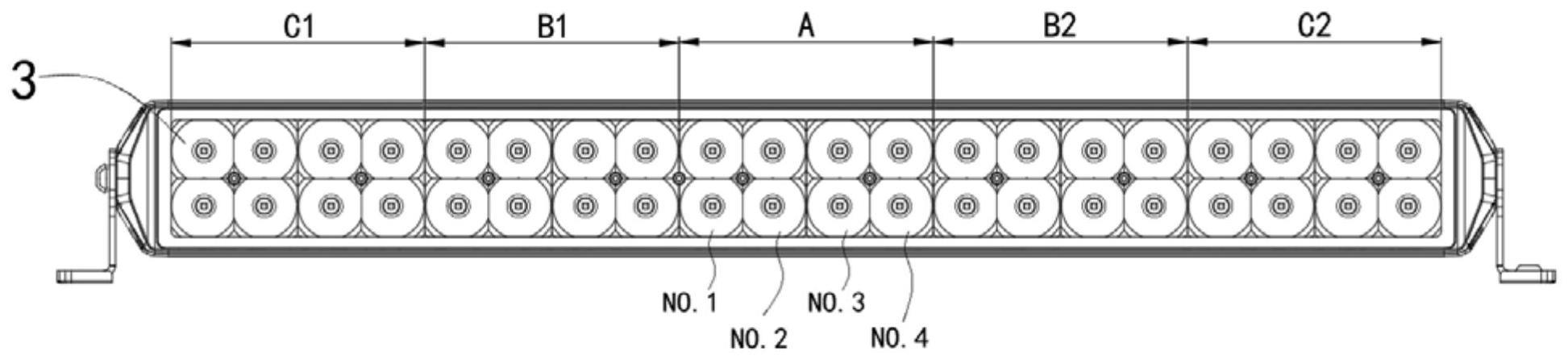
3、所述单点可控灯光模块包括由多个像素点光源构成的光源阵列,在该光源阵列划分有多个能独立控制的光源区域,其中包括位于中间位置的a区,由a区一侧依次往外布局的b1区和c1区,以及由a区另一侧依次往外布局b2区和c2区;且该光源阵列至少有两行以令各光源区域具有能被独立控制的上半区域和下半区域;
4、由速度传感器实时获取行车速度,由环境识别传感器实时获取环境参数,该环境识别传感器包括毫米波雷达或/和视觉识别摄像头;该主控单元根据行车速度及环境参数来控制单点可控灯光模块的各光源区域的亮度及亮/灭。
5、本发明的像素工作灯的智能识别控制方法,所述像素工作灯包括由多个像素点光源构成的光源阵列,在该光源阵列划分有多个能独立控制的光源区域,其中包括位于中间位置的a区,由a区一侧依次往外布局的b1区和c1区,以及由a区另一侧依次往外布局b2区和c2区;且该光源阵列至少有两行以令各光源区域具有能被独立控制的上半区域和下半区域;
6、方法包括以下操作:
7、1)行车速度识别
8、根据当前的行车速度调节车灯亮度至预设的亮度值,即规划有若干个车速区间,每一个车速区间对应一组各光源区域的亮度值,当实时的行车速度落入对应车速区间时,随即或逐渐将各光源区域调节到预设的亮度值;
9、当车辆处于提速状态时,
10、行车速度位于0-v1km/h区间,则a区以z1亮度点亮,b1区和b2区以y1亮度点亮,c1区和c2区以x1亮度点亮;
11、行车速度位于v1-v2km/h区间,则a区以z2亮度点亮,b1区和b2区以y2亮度点亮,c1区和c2区以x2亮度点亮;
12、行车速度位于v2-v3km/h区间,则a区以z3亮度点亮,b1区和b2区以y3亮度点亮,c1区和c2区以x3亮度点亮;
13、行车速度大于v3km/h,则a区以z4亮度点亮,b1区和b2区以y4亮度点亮,c1区和c2区以x4亮度点亮;
14、当车辆处于减速状态时,
15、时速大于v3km/h,则a区以z5亮度点亮,b1区和b2区以y5亮度点亮,c1区和c2区以x5亮度点亮;
16、行车速度位于v2-v3km/h区间,则a区以z6亮度点亮,b1区和b2区以y6亮度点亮,c1区和c2区以x6亮度点亮;
17、行车速度位于v1-v2km/h区间,则a区以z7亮度点亮,b1区和b2区以y7亮度点亮,c1区和c2区以x7亮度点亮;
18、行车速度位于0-v1km/h区间,则a区以z8亮度点亮,b1区和b2以y8亮度点亮,c1区和c2以x8亮度点亮;
19、2)急刹车识别
20、各光源区域先保持在刹车前的亮度值并持续t秒后逐渐切换至上述减速状态下当前行车速度所对应的车速区间的亮度值;
21、3)会车识别
22、当检测到车辆前方有来车时,进入会车状态;
23、行车速度位于0-v4km/h区间,因左右舵不同,则a、b1、b2、c1和c2区域分别关闭相关像素点光源,确保行车安全,其他像素点光源开启,并调节c1区亮度x10,b1区亮度y10,a区亮度z10,b2区亮度v10,c2区亮度t10;
24、行车速度大于v4km/h,因左右舵不同,则a、b1、b2、c1和c2区域分别关闭相关像素点光源,确保行车安全,其他像素点光源开启,并调节c1区亮度x11,b1区亮度y11,a区亮度z11,b2区亮度v11,c2区亮度t11;
25、4)跟车识别
26、当检测到车辆前方有同向行驶车辆时,进入跟车状态;
27、行车速度位于0-v5km/h区间,则c1、c2区全部关闭,视觉识别前车物理位置,并关闭前车对应照射像素模块,其他全部开启,并调节b1b2区亮度x12,a区亮度y12;
28、行车速度大于v5km/h,则视觉识别前车物理位置,并关闭前车对应照射像素模块,其他全部开启,并调节b1b2区亮度x13,a区亮度y13;
29、其中,设置跟车识别的优先级大于会车识别,当条件达到跟车状态时,优先执行跟车对应操作;当跟车状态结束时再判断是否满足会车状态的条件,若满足,则切换至执行会车对应操作,否则切换至行车速度识别操作。
30、本发明的有益效果是:实现了一套自主判断与控制车灯、保证行车视野的智能化识别系统,同时针对当前会车或跟车情形对会车识别与跟车识别交替切换,无需驾驶员操作便可针对不同行前状况作出对应的照明调节,驾驶体验好。更为优秀的是,本发明设置有单点可控灯光模块,该单点可控灯光模块包括由多个像素点光源构成的光源阵列,在该光源阵列划分有多个能独立控制的光源区域,且该光源阵列至少有两行以令各光源区域具有能被独立控制的上半区域和下半区域,这让光源调节更为精准,可以实现更细微的光照变换,且实施结构简单、成本相比之adb大灯要低,同时该方案能适配不同类型的车辆安装,具有较佳的技术性、经济性、实用性及灵活性。
技术特征:
1.一种带智能识别系统的像素工作灯,其特征在于,包括主控制单元、调光控制模块、单点可控灯光模块、速度传感器以及环境识别传感器;
2.根据权利要求1所述的带智能识别系统的像素工作灯,其特征在于,所述视觉识别摄像头装设于a区的中心位置。
3.根据权利要求1所述的带智能识别系统的像素工作灯,其特征在于,所述a区的像素点光源数量大于或等于其它各光源区域的像素点光源数量。
4.根据权利要求1所述的带智能识别系统的像素工作灯,其特征在于,所述主控制单元被定义为执行以下控制逻辑:
5.根据权利要求4所述的带智能识别系统的像素工作灯,其特征在于,
6.根据权利要求4或5所述的带智能识别系统的像素工作灯,其特征在于,每个区域分别包括八个像素点光源,标记为上层1号、2号、3号和4号,下层1号、2号、3号和4号;
7.根据权利要求4或5所述的带智能识别系统的像素工作灯,其特征在于,所述主控制单元还被定义为执行以下控制逻辑:
8.一种像素工作灯的智能识别控制方法,其特征在于,所述像素工作灯包括由多个像素点光源构成的光源阵列,在该光源阵列划分有多个能独立控制的光源区域,其中包括位于中间位置的a区,由a区一侧依次往外布局的b1区和c1区,以及由a区另一侧依次往外布局b2区和c2区;且该光源阵列至少有两行以令各光源区域具有能被独立控制的上半区域和下半区域;
技术总结
本发明提出一种带智能识别系统的像素工作灯及其智能识别控制方法,实现行车状态的智能识别及车灯光效的自动调节,该像素工作灯包括主控制单元、调光控制模块、单点可控灯光模块、速度传感器以及环境识别传感器;所述单点可控灯光模块包括由多个像素点光源构成的光源阵列,在该光源阵列划分有多个能独立控制的光源区域;且该光源阵列至少有两行以令各光源区域具有能被独立控制的上半区域和下半区域;该主控单元根据行车速度及环境参数来控制单点可控灯光模块的各光源区域的亮度及亮/灭。智能识别控制方法包括行车速度识别、急刹车识别、会车识别和跟车识别几种模式,每种模式分别根据当前的行车速度调节车灯亮度至预设的亮度值。
技术研发人员:徐宝洲
受保护的技术使用者:中山易事达光电科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!