基于多目标峰值DP算法的AIS航迹数据压缩方法
本发明涉及一种更适用于弯曲航迹的压缩算法,尤其是提供一种基于多目标峰值dp(douglas-peucker)算法的ais航迹数据压缩方法,属于船舶智能安全航迹计算。
背景技术:
1、自动识别系统(ais)为海洋智能化提供了海量的数据基础。由于原始ais数据存在冗余,直接使用会造成数据储存空间和计算成本的浪费,因此有必要进行数据压缩;douglas-peucker算法(dp)是一种有效的航迹压缩算法,可以很好地保存航迹的空间特性。但dp算法存在着以下不足:首先,dp算法在压缩多转弯航迹时,航迹复原效果较差。其次,dp算法未考虑船舶的船速和航向,最后dp算法可能会出现压缩后的航迹穿越障碍物的错误结果。
技术实现思路
1、本发明公开一种基于多目标峰值dp算法的ais航迹数据压缩方法,采用峰值采样策略,考虑航迹空间特性、航向、航速三个优化目标,加入障碍物检测机制,实现了一种更适用于弯曲航迹的压缩算法。
2、本发明所述的一种基于多目标峰值douglas-peucker算法的ais航迹数据压缩方法(以下简称:mpdp),技术解决方案如下:
3、1)坐标系变换后计算点到直线的距离
4、将轨迹点原地理坐标通过公式(1)(2)(3)(4)转换为墨卡托投影的坐标(x,y):
5、x=r0×λ (1)
6、y=r0×q (2)
7、
8、
9、其中λ和分别表示航迹点的经度和纬度;x和y分别表示航迹点的横坐标和纵坐标;表示墨卡托投影中的标准纬度;l表示地球椭圆球体的长半径;e表示地球椭球体的第一偏心率;r0表示标准纬度平行圆的半径;q表示等轴纬度;
10、经墨卡托投影转换后,通过矢量法计算点到直线的距离distance,如等式(5)所示:
11、
12、其中,a表示从线段起点到线段终点的矢量;b表示从线段起点到目标点的矢量;2)多目标峰值douglas-peucker算法
13、该算法任务为从原始航迹的航迹点集合os={p1,...pi,...pn},i∈(1,n)中提取出一个能够反映原始轨迹主要形态特征的关键航迹点集合ks={k1,...kj,...km},j∈(1,m);
14、多目标峰值douglas-peucker算法(mpdp)压缩步骤如下:
15、step1:设置压缩阈值ε(ε>0);采用0.8倍船长作为压缩阈值设置参考区间,对于不同的用户,可根据自身研究中对压缩强度的需求调节压缩阈值;
16、step2:将集合os的起点和终点加入集合ks;
17、step3:更新集合ks:
18、step3-1:以集合ks中的点为分裂点,将集合os划分为m-1个子集;
19、设两个相邻点kj到kj+1对应的os子集为os_subj;以kj到kj+1之间的直线为基线,如果kj与kj+1坐标不同,利用公式(5)计算子集os_subj中的各点到基线的距离,得到距离集合ds,反之当两点地理坐标相同,即船舶处于原地盘旋或往返运动时端点重合时,将点到直线距离改为采用公式(6)计算点到点距离distance′,得到距离集合ds;
20、
21、再利用公式(8)计算子集os_subj中的各点适应度fitness,得到适应度集合fs;
22、其中适应度包含点到直线距离、航向变化率和航速变化率三部分;三者的单位与量纲差别较大,不适合直接进行综合对比分析。需要将各个代价分别进行归一化处理,消除单位和量纲的影响。这里采取min-max标准化(min-max normalization)方法对原始数据的归一化处理,使归一化结果f值映射到[0,1]之间;转换公式(7)如下:
23、
24、其中,f代表需要进行归一化计算的各点的点到直线距离、航向变化率和航速变化率,max和min对应需要进行归一化计算的每一组数据的最大值和最小值。归一化计算后,适应度fitness计算如公式(8)所示:
25、fitness=α×d+β×η+ω×υ (8)
26、其中,d为归一化后的点到直线距离,η为归一化后的航向变化率,υ为归一化后的航速变化率;α,β,ω为取值[0,1]的权值系数,用户可根据实际应用中三项优化目标的重要程度,分配其比例关系并令α+β+ω=1;
27、step3-2:将各点适应度的集合fs中的取得极大值的点,加入到集合es中;将es中航迹点对应的距离逐一与阈值ε进行比较,如大于阈值ε将该点储存在集合ks中;
28、设置峰值个数阈值th_n,当搜索到极值点集es中个数大于th_n时,对极值点集es再次求取峰值,直至满足阈值要求;所保留的极值点为距离集中变化最大的峰值设置th_n取值为3至6的整数;
29、设置峰值压缩层数阈值th_l,当压缩层数小于阈值th_l时,采用多峰值保留策略进行多个航迹点保留;当压缩层数大于阈值th_l时,将取得适应度集合fs最大值处航迹点的点到直线距离与压缩阈值ε进行比较,如果大于ε则仅保留这一个航迹点,储存至集合ks中;设置th_l取值为1至3的整数;
30、step4:假设在所有子集os_sub的距离集合ds中距离最大值为dmax,如果dmax≥ε重复step3,否则跳转至step5;
31、step5:检查压缩后航段导通性:首先令计数器i=1,判断集合ks中航迹点ki与ki+1之间的航段是否存在障碍物,如果存在障碍物则不可以通行,令压缩阈值ε=0,将ki与ki+1使用step3增加新的航迹点加入集合并返回上一步判断,反之当不存在障碍物可以通行时再判断ki+1是否为终点,如果ki+1不是终点则令i=i+1,并返回上一级判断,反之ki+1是终点,则跳出循环完成压缩全过程;
32、需要补充说明的是:定义临界距离集合e,用以储存当轨迹点加入关键路径集合ks时,所对应ds中的距离;当完成障碍物检测后,选择更新后的临界距离集合e中的最小值作为推荐压缩阈值εnew。
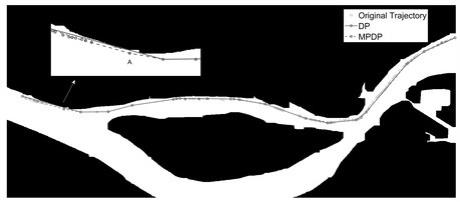
33、本发明的积极效果在于:提供了一种更适用于弯曲航迹的新压缩算法,采用峰值采样策略,考虑航迹空间特性、航向、航速三个优化目标,加入障碍物检测机制,通过模拟航迹实验及真实航迹实验对比了经典dp算法与mpdp算法;结果显示mpdp算法在保持与dp算法相近的高压缩率情况下,长度损失率、同步欧式距离、航速平均偏差和航向平均偏差均得到优化,并且可以成功避开障碍物。其中对于多转弯航迹或盘旋航迹优化效果最为明显,长度损失率、同步欧式距离和航速平均偏差的优化率可达40%以上。
技术特征:
1.一种基于多目标峰值douglas-peucker算法的ais航迹数据压缩方法,包括以下步骤:
技术总结
本发明提供一种基于多目标峰值DP算法的AIS航迹数据压缩方法,采用峰值采样策略,考虑航迹空间特性、航向、航速三个优化目标,加入障碍物检测机制,通过模拟航迹实验及真实航迹实验对比了经典DP算法与MPDP算法;结果显示MPDP算法在保持与DP算法相近的高压缩率情况下,长度损失率、同步欧式距离、航速平均偏差和航向平均偏差均得到优化,并且可以成功避开障碍物。其中对于多转弯航迹或盘旋航迹优化效果最为明显,长度损失率、同步欧式距离和航速平均偏差的优化率可达40%以上。
技术研发人员:王红波,周正,张英剑,张展硕,袁啸宇
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!