一种基于随机共振原理实现降低共振激励产生声学频率梳所需泵浦电压阈值的方法及装置
本发明涉及一种基于随机共振原理实现降低共振激励产生声学频率梳所需泵浦电压阈值的方法及装置,属于微机电器件非线性。
背景技术:
1、微机电系统(mems,micro-electro-mechanical system)是指集微型机构、微型传感器、微型执行器以及信号处理和控制电路、接口、通信和电源等于一体的微型器件或系统。其尺寸通常在毫米或微米级,具有重量轻、功耗低、耐用性好、价格低廉、易于集成等优点。微机电系统广泛应用于高新技术产业,关系到国家的科技发展、经济繁荣和国防安全等。
2、mems谐振器是在传统半导体工艺基础上制作的机械谐振器。随着集成化和尺寸微型化的发展,谐振器的非线性行为随之出现。通常非线性问题可以分为三类,分别是:(1)几何非线性(geometric nonlinearity),即位移的大小对结构的响应发生影响,包括大转动、大位移、几何刚性化、初始应力和突然翻转(snap through)等问题。(2)材料非线性(material nonlinearity),即材料的应力应变关系为非线性。(3)边界条件非线性(boundary nonlinearity),即边界条件在分析过程中发生变化。在微谐振器中涉及到的主要是材料非线性与几何非线性。至于材料非线性与几何非线性出现的次序,要结合具体问题具体分析。微机械谐振器的非线性动力学行为对于深刻理解mems的复杂运动机制具有重要的理论和实际意义。
3、光学频率梳(ofc)是指在频谱上由一系列均匀间隔且具有相干稳定相位关系的频率分量组成的光谱。光学频率梳相当于一个光学频率综合发生器,逐渐被人们运用于光学频率精密测量、原子离子跃迁能级的测量、远程信号时钟同步与卫星导航等领域中。类比于光学频率梳,声学频率梳是在声学系统中产生的频率梳。它是在共振激励下并基于简并四波混频原理或者非简并四波混频原理,谐振器的不同模态间发生非线性耦合产生的具有多个频率间隔相同的梳齿。
4、声学频率梳的产生在频率精密测量、天文物理、量子操控等应用方面具有美好前景。然后,想要产生大范围的频率梳非常难,而频率梳的作用又非常多,因此不论是研究大范围产生声学频率梳的方法还是研究实现降低共振激励产生声学频率梳所需泵浦电压阈值的方法都非常重要。目前报道产生的声学频率梳都是基于简并四波混频原理或者非简并四波混频原理产生的,由于难以满足大范围的零色散关系,产生的频率梳根数较少,存在一定的局限性。因此,研究横跨多模态的频率梳对于提高测量精度以及实现宏观与量子操控相结合具有重大意义。
5、随机共振(stochastic resonance)的概念最初是由benzi等人在研究古气象冰川问题时提出来的。它描述了一个具有非线性的双稳态系统,在一个周期性调制信号的作用下同时输入噪声和信号,当噪声增强到某一强度的时候,信噪比不仅不会降低,相反系统会产生随机共振,使得输出信号得到显著增强。1983年,s.fanve领导的法国科研小组在具有双稳态输出特性的斯密特(schmitt)触发电路系统中发现了随机共振。他们在电路的输入端同时输入信号和噪声,测量输出信号的功率谱,发现在信噪比与噪声强度的函数曲线上出现了一个最大值,即观察到了“随机共振”现象。1988年,美国的物理学家m.mcnamara和g.vemuri在光学系统实验中也证实了随机共振现象。研究者们主要利用朗之万方程和福克一普朗克(fokker-planck)方程讨论随机共振的各种统计性质,逐步发展形成了随机共振的绝热消去(adiabatic elimination)理论和线性响应(linear response)理论。作为一种有效的信号处理方法,随机共振广泛用于诸如双稳或多稳非线性系统、激励系统、生物系统等。
6、微悬臂梁由于其独特的低对称性能够满足大范围的零色散关系,在共振激励下能够产生横跨多模态的声学频率梳,弥补了目前研究的声学频率梳梳齿稀疏测量精度低的不足。与此同时,微悬臂梁是一个标准的双稳态系统,且结构简单、易于集成,为基于随机共振原理实现降低共振激励产生声学频率梳所需泵浦电压的阈值,即实现微弱信号的检测,提供了重要条件。因此,利用微悬臂梁研究随机共振非常有意义。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于随机共振原理实现降低共振激励产生声学频率梳所需泵浦电压阈值的方法及装置,只需用信号发生器输出一个经典的白噪声信号,就可以实现检测信号的加强,即产生频率梳,方法简单,原理性强。
2、本发明采用如下技术方案:
3、一种基于随机共振原理实现降低共振激励产生声学频率梳所需泵浦电压阈值的方法,分为两个部分,分别是利用共振激励获得声学频率梳,其次是在系统中加入一定的白噪声,利用共振激励获得声学频率梳,包括如下步骤:
4、(1)利用多普勒测振仪和锁相放大器测得微悬臂梁谐振器的二阶弯曲模态的本征频率f2,以及二阶弯曲模态在不同probe电压下的频率响应;
5、(2)在微悬臂梁谐振器的第二阶弯曲模态的本征频率f2处施加频率为fp的pump信号,使得微谐振器与压电片同时失谐,微悬臂梁谐振器的不同模态发生非线性耦合;
6、固定信号发生器输出pump信号的频率fp,逐步改变pump信号的电压vpump,观察微悬臂梁谐振器的频率梳的产生,并确定产生频率梳所需pump信号的电压阈值;
7、(3)用另一个信号发生器向系统中输入一个噪声信号,重复步骤(2)得到在存在噪声的情况下,微悬臂梁谐振器产生声学频率梳的pump电压阈值。
8、优选的,微悬臂梁谐振器为单端固定的矩形悬臂梁,包括支撑基座和悬臂,支撑基座和悬臂的材料均为单晶硅,具体如图2所示,悬臂为自由端,支撑基座优选采用胶水固定在压电片上,悬臂的尺寸为:长450μm,宽50μm,厚2μm;
9、压电片为圆形陶瓷片,材料为锆钛酸铅(pzt),其压电系数d33为350pmv-1,压电片的尺寸为:直径30mm,厚2mm。
10、优选的,步骤(1)中,确定微悬臂梁弯曲模态的本征频率,主要包括:
11、1)利用多普勒测振仪对悬臂梁进行频率扫描和振动信号的采集;
12、2)经过锁相放大器进行降噪处理和振动信号的显示,确定微悬臂梁弯曲模态的本征频率。
13、进一步优选的,步骤1)中,多普勒测振仪是非接触式光学传感器,可以通过激光的多普勒效应对运动物体的位移和速度进行探测,当从测振仪激光探头发出的激光照射到运动物体上时,从运动物体反射或散射回的激光将发生明显的频移。通过测量反射光的频移量以及相对于入射光的相位,就可以计算出运动物体的位移量和速度值。本发明中由测振仪探头发出的633nm的激光通过显微物镜聚焦到微悬臂梁表面,探测到的振动信号经过多普勒测振仪控制器转化为电压信号;
14、步骤2)中,锁相放大器对输入信号进行傅利叶变换,从而消除被检测信号中特定频率成份之外的噪声信号,提高信噪比,并将信号显示在计算机上;
15、步骤(1)中测得微悬臂梁谐振器的二阶弯曲模态的本征频率f2,以及二阶弯曲模态在不同probe电压下的频率响应,具体步骤为:
16、首先通过位移台调节微悬臂梁谐振器的位置,将多普勒激光聚焦到微悬臂梁谐振器的尖端,即振幅最大处,与此同时,聚焦效果通过光学ccd观察;
17、然后锁相放大器向微悬臂梁谐振器输入probe信号激励振动(probe电压,可以由与锁相放大器相连的计算机显示并控制),悬臂梁的位移和速度信号经过多普勒测振仪的控制器转化为电压信号,再经锁相放大器进行降噪处理,微悬臂梁的频率响应曲线显示在与锁相放大器相连接的计算机上,频率响应曲线的横坐标为频率,纵坐标为电压,确定前两阶弯曲模态的本征频率f1、f2,确定f1为18.41khz,f2为113.79khz(如图8所示,可以从图中可明显得出f1为18.41khz,f2为113.79khz),接近理论上欧拉-伯努利梁模型前两阶弯曲模态频率的比率关系f1∶f2=1∶6.267。
18、二阶弯曲模态的振型如图3所示;
19、依次增大probe电压,分别得到微悬臂梁谐振器二阶弯曲模态在0.2v,0.4v,0.6v,0.8v,1v,2v的探测电压下的频率响应,具体结果如图4所示。
20、由图4可以看出,在大的probe电压下,微悬臂梁二阶模态的振幅出现了垂直跳跃,且频率是左移的,即发生了非线性软化。证明了微悬臂梁是一个标准的双稳态非线性系统,从而为降低泵浦阈值的实现提供了理论依据。
21、优选的,步骤(2)具体步骤如下:
22、2.1:在微悬臂梁谐振器的第二阶弯曲模态的本征频率f2处进行共振激励,激励信号的频率为fp,利用信号发生器输出频率为fp的正弦波信号,此信号为pump信号,fp的大小与f2相同,为113.79khz;
23、2.2:固定信号发生器输出pump信号的频率为fp,逐步改变pump信号的电压vpump,观察系统中频率梳的产生,当梳齿间隔相同的频率梳出现时,确定产生该频率梳所需pump信号的电压阈值。
24、当vpump达到阈值时,微悬臂梁系统会出现梳齿间隔相同的频率梳;
25、共振激励是指对谐振器施加一个固定频率且频率接近谐振器的本征频率的周期性的激励信号。把振动的悬臂梁谐振器视为一个简单的振子,不仅方便理解,更可以将复杂的问题简单化,直击问题本质。
26、对于共振激励,谐振子方程可以写成如下形式:
27、
28、其中,x是位移、t是时间、ω是角频率、ε代表充分小的微量、v是速度;
29、设f(vt,x,dx/dt)是以vt为2π为周期的周期函数,并可表示为:
30、
31、其中,有限级数的系数fn(x,dx/dt)是包含x和dx/dt的多项式,n表示积分起止数,einvt表示f(vt,x,dx/dt)是以vt为2π为周期的周期函数。
32、如无干扰,则ε=0,则系统将有简谐振动h表示谐振子的振幅;表示简谐振动的初相位;
33、接下来将x和dx/dt代入谐振子方程,并把展成傅氏级数,由于它对vt来说是周期函数,所以其傅氏级数将包含sin(nv+mω)t和cos(nv+mω)t,其中n和m是整数,这说明在干扰力中将有组合频率为(nv+mω)的谐波。
34、很明显,任何一个组合频率成分与系统的固有频率相接近时,则具有该频率成分的干扰力对振动特性将发生很显著的影响,即将引起振幅和相位连续的、缓慢的变化,而不管该谐波的振幅大小如何。因此在非线性系统中,共振现象不但发生在v≈ω时,而且也发生在nv+mω≈ω时,故在单频干扰力作用下,共振关系为其中p、q为与非线性函数有关的正的或负的互质的整数。
35、这就是共振激励产生激励频率的分数解,现象上出现频率梳的原因。
36、优选的,步骤2.2中,固定pump信号的频率fp是指fp为113.79khz,改变pump信号的电压vpump的步长为10mv,逐步增大。
37、优选的,步骤2.2中,在500mv和600mv之间以10mv为步长,向系统加入pump信号,500mv和600mv为通过逐步改变pump信号的强度得到的大致区间,如图9(a)、9(b)所示,频率梳从无到有,通过观察频率响应曲线,共振激励产生频率梳的阈值范围在570-580mv之间,如图5(a)、5(b),图5(a)时还未观察到频率梳,图5(b)观察到了频率梳。前者泵浦为570mv,后者泵浦为580mv,因此可以确定共振激励产生频率梳的阈值范围在570-580mv之间。
38、优选的,步骤(3)中,实现了降低共振激励产生声学频率梳所需pump电压的阈值,具体包括步骤如下:
39、1)用另一个信号发生器向系统中输入一个噪声信号。
40、2)重复步骤(2)得到在存在噪声的情况下,微谐振器产生声学频率梳的pump电压阈值。
41、步骤(3)中,所加噪声为γ(t),大小vnoise为2.3mv,γ(t)代表高斯分布白噪声,且满足统计平均,其中<γ(t)γ(t’)>=2dδ(t-t′),d为噪声强度,t′为延迟时间,δ为狄拉克函数,它是一个广义函数,在物理学中常用其表示质点、点电荷等理想模型的密度分布,该函数在除了0以外的点函数值都等于0,且其在整个定义域内的积分等于1;
42、相应的势函数为:
43、
44、其中,x是位移,a、b都是势参数,a是外部周期驱动力的幅值,ω0是外部周期驱动力的角频率,t是时间。
45、系统在x=0处的两个势阱点和一个势垒点分别对应势函数曲线中的2个极小值和1个极大值。当低于阈值的信号输入双稳态系统时,由于信号能量无法克服系统势垒的阻挡,系统的输出状态只能在或处的势阱中做局域的周期性运动,即在两稳态之间没有出现跃迁。当在系统中逐渐增加噪声的输入量,使得信号和噪声在双稳态系统中产生协同效应时,其协同能量能克服系统势垒,以信号频率在两稳态之间产生跃迁,此时的系统已经进入随机共振状态。
46、优选的,步骤(3)中,在噪声存在的情况下,在200mv和300mv之间以10mv为步长,向系统加入pump信号,200mv和300mv为通过逐步改变pump信号的强度得到的大致区间,如图10(a)、10(b)所示,频率梳从无到有,通过观察频率响应曲线,如图7所示,共振激励产生频率梳的阈值范围在260-270mv之间。
47、在不存在周期激励而存在噪声作用的情况下,x(t)围绕某一局部稳态波动,且其统计方差正比于噪声强度d。噪声驱动的转换以某一速率进行,噪声强度d增加,转换率增加。噪声引起的以如下的kramers率在局部均衡态间跳跃迫使均值<x(t)>消失:
48、
49、其中,rk表示kramers率,δv表示势垒高度,a为势参数,d为噪声强度。
50、当垒高最小时,阱间转换更为可能。因为正弦信号在其频率处导致势低点位置周期性变化,它有效地锁住了噪声导致的转换。特别地,当噪声本身以每2π/ω秒周期平均产生两次转换时,在x(t)中的频率ω处,将观测到一个强正弦分量。
51、图6为引入噪声后的双肼势示意图,其中的箭头是指,加入噪声后,当势垒高度最小时,使得x(t)越过势垒成为可能,系统发生了随机共振。
52、周期性外部信号和噪声一起加到双稳态的非线性系统中实现了协同效应,发生了随机共振,产生了更为强烈的周期振动。噪声对微悬臂梁系统的影响非常显著,一个微弱的噪声信号对系统造成了百倍的正反馈,本发明中,加入2.3mv的噪声,能够使得产生频率梳的泵浦阈值降低300mv左右,噪声信号是很微弱的,但能产生很大的正反馈。300mv是2.3mv的近130倍。
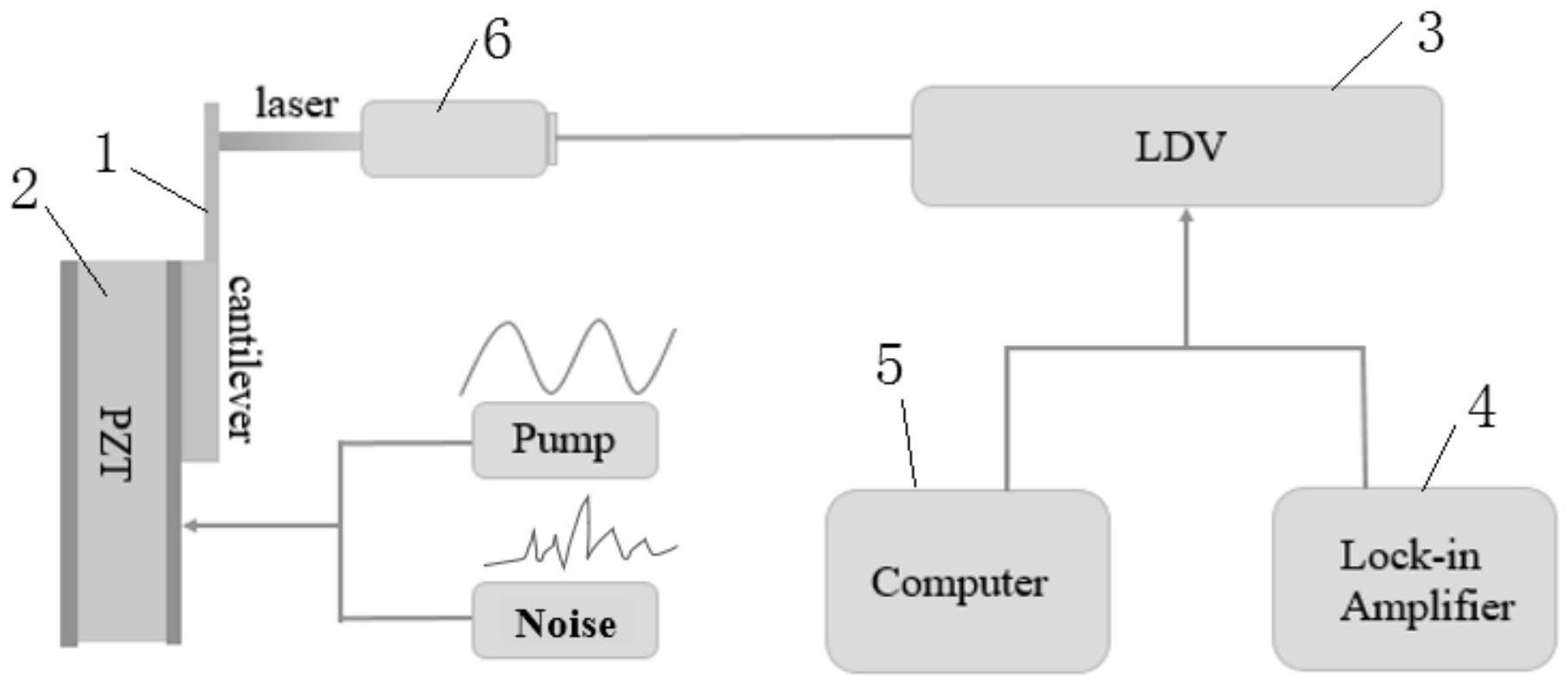
53、一种基于随机共振原理实现降低共振激励产生声学频率梳所需泵浦电压阈值的装置,包括微悬臂梁谐振器、压电片、真空腔、多普勒测振仪、锁相放大器和计算机,多普勒测振仪包括探头和控制器;
54、所述锁相放大器、多普勒测振仪、微悬臂梁谐振器、压电片依次连接;所述锁相放大器连接计算机,压电片连接信号发生器,微悬臂梁谐振器和压电片置于真空腔内;
55、信号发生器(33220a,安捷伦,美国)的数量为两个,分别用于对微悬臂梁谐振器系统施加pump信号和噪声信号;
56、所述微悬臂梁谐振器上设置有位移台,用于调节微悬臂梁谐振器位置。
57、优选的,真空腔的真空度为10-2mbar;
58、激光多普勒振动仪为非接触式光学传感器,用于检测微悬臂梁的位移和速度变化,型号为ofv-5000/534,聚焦光斑为10μm;
59、锁相放大器为signal recovery公司生产的7265型数字锁相放大器,频率范围为0.001hz-250khz,电压灵敏度为2nv-1v,用于对信号进行降噪处理,并将结果显示在计算机上。
60、本发明未详尽之处,均可参见现有技术。
61、本发明的有益效果为:
62、1、本发明只需用信号发生器输出一个经典的白噪声信号,就可以实现检测信号的加强,即产生频率梳,方法简单,原理性强。
63、2、本发明的微悬臂梁谐振器置于真空环境中,微谐振器损耗极低,品质因数高。
64、3、本发明装置简单,易于检测微弱信号。
65、4、非接触的调控方式精准有效,不会损伤微谐振器。
66、5、微悬臂梁结构简单,可控性强,是一个典型的双稳态非线性系统,能够很好地利用随机共振实现信号的检测。
- 还没有人留言评论。精彩留言会获得点赞!