用于车辆照明的控制系统、控制方法和计算机程序产品与流程
本发明涉及一种用于车辆照明的控制系统,所述控制系统包括:定位模块,用于获取目标对象相对于所述车辆的目标对象位置;和探测模块,用于获取能够表征环境光线条件的数据,以便求取所述目标对象位置处的照明程度;其中,所述控制系统配置用于,基于所述目标对象位置处的照明程度,相应地控制所述车辆的照明模块。此外,本发明涉及一种用于车辆照明的控制方法以及一种计算机程序产品。
背景技术:
1、在某些情况下,即使用户并不位于车内或者车辆并不处于行驶状态,仍然需要使用车辆中的照明模块对周围环境进行照明。例如,在环境光线条件较差的地方,在没有城市路灯的野外、在没有足够灯光的停车场内等,期望照明模块仍然可供用于对用户自己或其周围环境进行照明,否则可能无法快速找到安全的行进路径或安全的行进方向。在最坏的情况下,可能由于其他对象、尤其是车辆无法及时发现用户而导致发生事故。
2、对于现有技术中已知的用于在用户下车后提供辅助照明的方法而言,其往往不够精准并且其照明范围往往受限。
技术实现思路
1、为了解决上述问题,提出了一种用于车辆照明的控制系统、一种用于车辆照明的控制方法以及一种相应的计算机程序产品。在下文中还将阐述优选的实施方式。
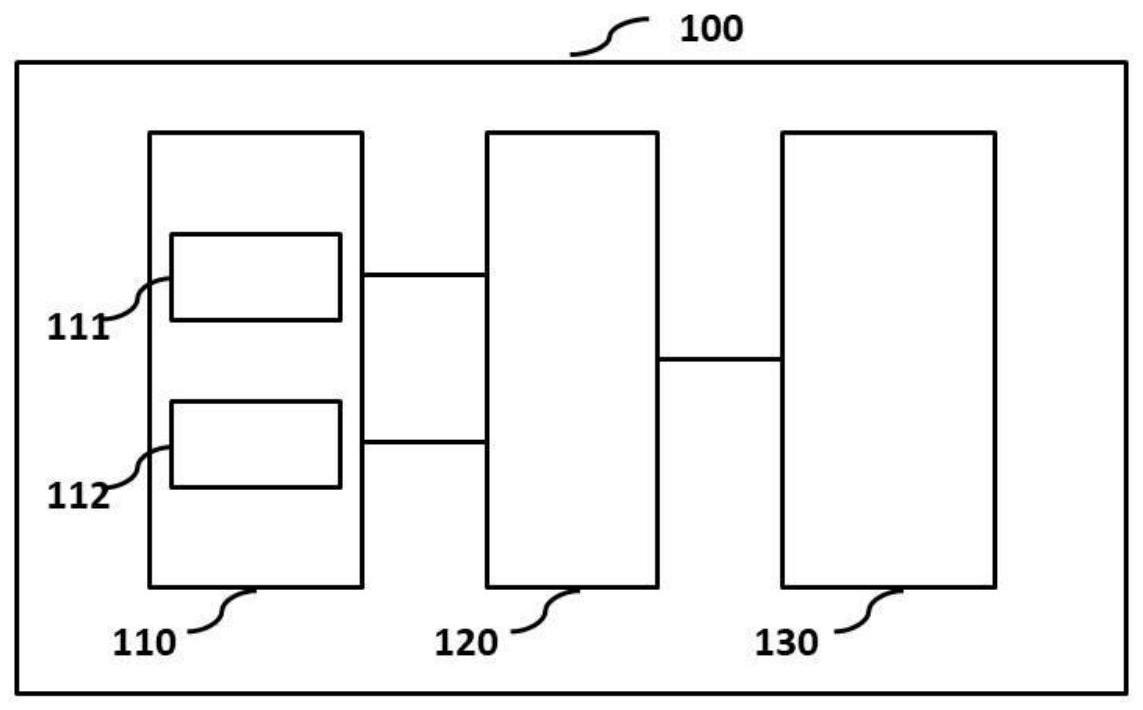
2、根据本发明的第一方面,提出一种用于车辆照明的控制系统,所述控制系统包括:
3、-定位模块,用于获取目标对象相对于所述车辆的目标对象位置;和
4、-探测模块,用于获取能够表征环境光线条件的数据,以便求取所述目标对象位置处的照明程度;
5、其中,所述控制系统配置用于,基于所述目标对象位置处的照明程度,相应地控制照明模块。
6、在本发明的范畴内,目标对象理解为被定位的对象,其可以是车辆的乘员,例如驾驶员、乘客,其也可以是能够与定位模块通信从而被定位的(移动)终端设备、尤其是电子终端设备,例如智能手机、车辆钥匙、蓝牙等。
7、在此,定位模块配置用于获取该目标对象相对于车辆或者说该定位模块的位置、即目标对象位置。
8、原则上,定位模块可以是任何能够实现定位动能的装置。在此,尤其提及蓝牙5.1及其定位原理。在aoa(angle of arrival,到达角度法)的情况下,单天线装置将信号、即寻向信号发射到内置天线阵列的装置,然后该内置天线阵列的装置通过对该接收到的信号进行分析处理而附加地计算出所述信号的方向。反之,在aod(angle of departure,出发角度法)的情况下,内置天线阵列的装置将信号、即寻向信号发射到单天线装置,然后该单天线装置通过对接收到的信号进行分析处理而附加地计算出所述信号的方向。由此能够在确定间距的同时还确定方位。此外,视蓝牙终端设备配置而定地,最高能够提供厘米级别的定位精度。
9、在本发明的范畴内,目标对象位置应广义地理解,其不仅能够包括目标对象相对于车辆的间距、角度,还能够包括目标对象相对于车辆的间距范围、角度范围等。换言之,附加地还能够在二维平面上对目标对象进行定位。例如,在间距或者说间距范围方面,还能够获取在横向方向上(即在平行于地面的水平方向上)和/或在纵向方向上(即在垂直于地面的纵向方向上)间距随着横向位置和/或纵向位置而变化的信息。例如,在角度或者说角度范围方面,还能够获取关于仰角和/或方位角的信息。显然,所述间距范围和所述角度范围能够相互换算。由此,能够描绘目标对象(用户)的轮廓,该轮廓例如通过横向尺寸和纵向尺寸来表征。总而言之,通过定位模块获取的关于目标对象的位置的信息是更详细的和更全面的。
10、在此,探测模块配置用于获取能够表征环境光线条件的数据、尤其是图像数据,以便求取相应位置处的照明程度,更准确地说求取所述目标对象位置处的照明程度。探测模块的简单示例是摄像机和视频图像传感器。基于由探测模块获取的数据(例如图像数据)能够获取关于环境光线条件的信息。在本发明的范畴内,照明程度理解为表征环境光线条件的参量或者说影响视觉感知的参量,例如照度、亮度、光通量等。
11、附加地,基于由探测模块获取的数据还能够获取关于目标对象的位置的信息。能够想到,通过将初始获取的目标对象位置与基于由探测模块获取的数据所获取的位置进行比对和相互校验,能够在定位、尤其是确定方位方面实现更高的准确性。
12、最后,所述控制系统配置用于,基于所述目标对象位置处的照明程度,相应地控制所述车辆的照明模块。对于本发明而言重要的是目标对象位置处的照明程度。这就是说,用户是否真正地需要车辆的辅助照明主要取决于用户所处位置处的照明程度或者说用户行进方向上的照明程度。
13、在此,原则上,所述照明模块可以是任何能够实现照明动能的装置。在此,尤其提及矩阵式的、点控制的照明模块。这就是说,一方面,所述照明模块由以矩阵形式排列的多个照明装置制成,所述照明装置尤其是或包括led大灯、激光大灯等。另一方面,所述照明模块中的各个照明装置不仅能够整体地、逐行地和/或逐列地被控制,而且能够精确到点地分别单独地被控制,即允许点控制。示例性地,提及ihc(intelligent headlight control,智能前照灯控制系统)和ihbc(intelligence high beam control,智能远光灯控制系统)。对照明模块的控制也称为对照明模块的照明模式的确定。在此,能够在照明亮度和照明区域实现对照明模块及其照明模式的灵活的、智能的控制。能够想到,照明亮度的控制意味着一个单个的照明装置的开启、关闭和可调亮度的控制,而照明区域的控制意味着至少包括fov(field of view,视场角)控制、横向范围控制、纵向范围控制以及可能的定向控制。因此,光源的指向性是更加科学的和更加合理的。
14、根据本发明的方法尤其适用于车辆并不处于行驶状态的情况,例如,用户并不位于车内,而是下车查看,或者离车而去、例如离开停车场。在根据本发明的方法中,通过对离车用户所在位置处的环境光线条件进行分析处理,能够更加着眼于用户需求地进行辅助照明,而避免了不必要的和不及时的辅助照明。
15、在根据本发明的控制系统的一种优选实施方式中,所述控制系统配置用于,如果所述目标对象位置处的照明程度小于预定阈值,那么启用所述照明模块。反之,如果所述目标对象位置处的照明程度大于等于预定阈值,那么停用所述照明模块。
16、在此,能够想到,在用户下车后、例如停车离去,如果车辆的周围环境中的环境光线条件较差,而离车用户的周围环境中的环境光线条件是足够好的,那么没有必要通过照明模块进行辅助照明。由此能够省去不必要的照明。
17、此外,能够想到,在用户下车后、例如停车离去,如果车辆的周围环境中的环境光线条件是足够好的,而离车用户的周围环境中的环境光线条件较差,那么需要及时通过照明模块进行辅助照明。由此能够及时地实现辅助照明。
18、在根据本发明的控制系统的一种优选实施方式中,所述控制系统配置用于,如果所述目标对象位置位于有效距离范围内,那么启用所述照明模块。反之,如果所述目标对象位置超出有效距离范围,那么停用所述照明模块。原则上,有效距离范围可以理解为相配合的硬件部件的作用距离,所述硬件部件在此可以是定位模块、照明模块和/或探测模块等。在本发明的范畴内,有效距离范围尤其可以理解为目标对象(终端设备)与车辆之间能够实现有效通信的距离范围,视终端设备或者说通信技术而定地,该有效距离范围能够是不同的距离范围,例如几十米或几百米等。能够想到,当目标对象移动超出有效距离范围时,即使通过探测模块确定出环境光线条件较差,也将停用照明模块。由此基于空间维度信息省去不必要的照明。
19、在根据本发明的控制系统的一种优选实施方式中,所述控制系统配置用于,基于所述目标对象位置,相应地选择所述探测模块和/或设置所述探测模块的定向。示例性地,所述探测模块能够包括一个或者多个摄像机。在此,基于所述目标对象位置、尤其是基于所述目标对象相对于所述车辆的方位地,能够从多个摄像机中选择合适的摄像机而不启用其他摄像机,或者,能够设置摄像机的定向、例如转动一定的角度,从而能够使用最优摄像机对离车用户进行采样。由此,一方面能够降低待处理的图像数据量,另一方面能够快速地实现离车用户的准确定位及其照明程度的求取。
20、在根据本发明的控制系统的一种优选实施方式中,所述控制系统配置用于,求取所述目标对象相对于所述照明模块的相对位置,以便调整所述照明模块。
21、能够想到,基于所述目标对象相对于所述车辆的目标对象位置以及车辆本身已知的所述照明模块在所述车辆中的安装位置,能够求取或者说计算出所述目标对象相对于所述照明模块的相对位置。
22、类似于或者相应于在上文中针对目标对象位置所阐述的那样,相对位置也包括以下各项中的至少一项:间距,横向尺寸,纵向尺寸,中心方向角,方位角,仰角等。相应于此地,对照明模块的调整能够针对整个照明模块、整行、整列、单个照明装置地在以下各项中的至少一项方面进行:fov(field of view,视场角)控制,横向范围控制(宽度),纵向范围控制(高度),亮度控制和定向等。
23、由此,能够更加有针对性地和更加精准地实现对照明模块的控制,尤其地,在照明方向方面实现更加精准的控制。
24、在根据本发明的控制系统的一种优选实施方式中,所述探测模块附加地用于获取所述目标对象的周围环境中的周围环境信息,以便调整所述照明模块。通过探测所述目标对象的周围环境中的周围环境信息,能够识别出对于离车用户而言重要相关的周围环境对象。由此,控制系统能够基于此地对照明模块进行适配,使得离车用户能够在弱光环境中更好地寻找安全的行进路径和行进方向。
25、在根据本发明的控制系统的一种优选实施方式中,所述周围环境信息包括表征其他对象、尤其是移动对象的对象信息。在此,所述其他对象例如是其他车辆或者行人,其能够通过摄像机、毫米波雷达等被感知和确定(定位)。相应于此地,所述控制系统配置用于,在开闭和/或幅值和/或方向方面调整所述照明模块,尤其是通过关闭和/或降低幅值和/或向下调整方向进行所述调整。示例性地,能够想到,对于迎面走来的行人或者对向行驶的车辆的驾驶员而言,为了避免照射其眼部区域的光强高于安全阈值或者避免照明模块的光线直射其眼部区域,需要降低该照明模块的亮度和/或以远离人眼的方向的方式控制该照明模块的方向。
26、附加地或者替代地,所述周围环境信息包括表征指示性标志的指示信息。在此,所述指示性标志指的是影响目标对象的行进路径、尤其是对目标对象的行进路径具有指示意义或指引作用的物体标识。所述物体标识的示例是进口标志、出口标志、标识牌、障碍物等。相应于此地,所述控制系统配置用于,在开闭和/或幅值和/或方向方面调整所述照明模块,尤其是通过开启和/或增加幅值和/或指向所述指示性标志进行所述调整。示例性地,能够想到,为了能够以更清楚的方式向离车用户示出所述指示性标志,能够开启相关的照明装置,增加所述照明模块(矩阵大灯)的亮度,和/或,通过调整方向而在所述指示性标志所在的局部区域中凸显所述指示信息,优选还能够特定于所述对象地进行描边。由此能够实现对离车成员的提示和指引。
27、附加地或者替代地,所述周围环境信息包括表征行驶场景的场景信息。在此,所述行驶场景可以理解为对于目标对象而言存在潜在危险的环境。相应于此地,所述控制系统配置用于,在照明图案方面调整所述照明模块,尤其是通过投影出特定的图案进行所述调整,优选地以特定的闪烁频率投影出所述特定的图案。示例性地,能够想到,如果探测到周围环境中存在遮蔽的路口并且同时探测到周围环境中存在行驶中的车辆,那么能够如此调整所述照明模块的照明模式,使得该照明模块(矩阵大灯)能够投影出警示标识,从而不仅提醒离车用户而且提醒过往车辆提高安全警惕,由此进一步提高了用户的安全。
28、在根据本发明的控制系统的一种优选实施方式中,所述定位模块配置用于,基于aoa或者aod对所述目标对象进行定位。在此,能够在定位时不仅确定间距、还确定了方位角和仰角,由此以高效的方式实现对目标对象的更加全面和更加完整的定位。
29、附加地或者替代地,所述照明模块是矩阵式点控制的照明模块。由此,能够以更加灵活的方式实现对照明模块的控制,使得光源的指向性是更加科学的和更加合理的。
30、根据本发明的第二方面,提出一种用于车辆照明的控制方法,所述方法包括:
31、-获取目标对象相对于所述车辆的目标对象位置;
32、-获取能够表征环境光线条件的数据,以便求取所述目标对象位置处的照明程度;和
33、-基于所述照明程度与预定阈值的比较,相应地控制所述车辆的照明模块。
34、根据本发明的第三方面,提出一种计算机程序产品、例如计算机可读程序介质,所述计算机程序产品包括或存储有计算机程序指令,当所述计算机程序指令被处理器运行时,所述计算机程序指令能够实施根据权利要求1至8中任一项所述的方法。
35、针对根据本发明的控制系统所阐述的实施方式、技术特征和优点同样适用于根据本发明的控制方法和计算机程序产品,并且反之亦然。
- 还没有人留言评论。精彩留言会获得点赞!