板体的自动调节系统的制作方法
本申请涉及自动化,尤其涉及一种板体的自动调节系统。
背景技术:
1、目前,印刷电路板在放置在平台上后,需要调整至合适的位置。
2、现有技术中,主要依靠外部控制器对平台进行控制,从而实现平台以及设置在平台上的印刷电路板位置的调节,平台自身仅仅为一个机械设备,无法进行单独使用。
3、因此,如何提供一种能够自动校准的平台成为亟待解决的问题。
技术实现思路
1、本申请所要解决的一个技术问题是:如何实现平台的自动校准。
2、为解决上述技术问题,本申请实施例提供一种板体的自动调节系统,包括:
3、第一平台,第一平台的第一表面具有多个区域,每个区域上至少设置有一个压力传感器,每个压力传感器用于感测放置在对应区域的板体的压力数据;
4、第二平台,第二平台设置在第一平台背离第一表面的一侧;
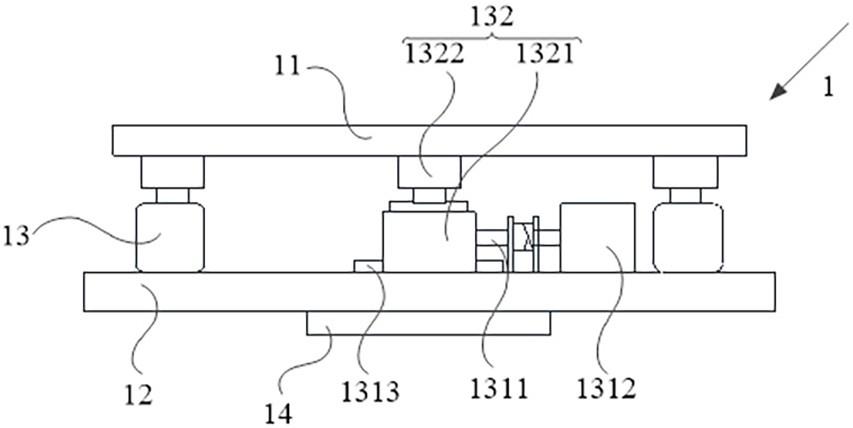
5、驱动装置,驱动装置设置在第一平台和第二平台之间,驱动装置包括驱动件和活动块,活动块与驱动件活动连接,驱动件与第二平台固定连接,活动块与第一平台固定连接;
6、控制器,控制器分别与多个压力传感器和驱动装置连接,用于根据压力传感器感测到的对应区域的压力数据驱动驱动装置的活动块进行活动,以使第一平台和放置在第一平台上方的板体沿第一轨迹活动至预设位置。
7、在一些实施例中,第一平台的每个区域上均设置有至少一个气孔,每个气孔连接一个负压装置,以在板体放置在第一平台上时,吸收第一平台与板体之间的气体,以通过负压将板体压紧至第一平台上。
8、在一些实施例中,控制器还与负压装置连接,以控制负压装置的放气或吸气。
9、在一些实施例中,驱动件包括丝杆和电机,丝杆沿平行于第一平台的第一表面的方向设置,电机与丝杆的一端连接,以驱动丝杆转动,丝杆上转动连接有活动块。
10、在一些实施例中,驱动装置还包括第一导轨,第一导轨设置在第二平台上,第一导轨与对应的丝杆的延伸方向平行,第一导轨上滑动连接有活动块。
11、在一些实施例中,活动块包括第一滑块和第二滑块,第一滑块与丝杆转动连接,且滑动连接于第一导轨,第一滑块上具有第二导轨,第二滑块滑动连接于第二导轨,第二滑块与第一平台固定连接。
12、在一些实施例中,第二导轨与第一导轨之间不平行,且第二导轨与第一轨迹之间不平行。
13、在一些实施例中,驱动装置包括第一驱动装置、第二驱动装置和第三驱动装置,第一驱动装置与第二驱动装置相对设置,且第一驱动装置的第一导轨与第二驱动装置的第一导轨平行,第三驱动装置设置在第一驱动装置与第二驱动装置之间,第三驱动装置的第一导轨所在直线与第一驱动装置的第一导轨所在直线之间具有夹角。
14、在一些实施例中,多个压力传感器围合形成矩形结构,每个压力传感器相邻设置有至少一个气孔,且多个气孔均设置在矩形结构的外围。
15、在一些实施例中,第一表面上还设置有多个连接件,用于将板体固定在第一表面上。
16、通过上述技术方案,本申请提供的板体的自动调节系统,包括第一平台、第二平台、驱动装置和控制器,第一平台具有第一表面和第二表面,第一平台的第一表面用于放置板体,第一平台的第二表面与第二平台相对设置,第一平台与第二平台之间设置有驱动装置,第一平台的第一表面上具有多个区域,每个区域上至少设置一个压力传感器,控制器分别与多个压力传感器和驱动装置连接,驱动装置包括驱动块和活动块,驱动块与第二平台固定连接,活动块与第一平台固定连接,活动块与驱动块活动连接。当板体放置在第一平台的第一表面上时,板体的重力会下压第一平台上多个区域对应的多个压力传感器,多个压力传感器均与控制器连接,多个压力传感器会分别感测到压力数据,多个压力传感器将感测到的压力数据传输至控制器,控制器根据压力数据判断板体是否处于预设位置,,当控制器根据压力数据判断板体不在预设位置时,则控制器根据接收到的多个压力数据控制驱动装置的活动块进行活动,从而使得活动块带动第一平台和第一平台上的板体沿第一轨迹活动至预设位置。
17、从而本申请提供的板体的自动调节系统,通过在第一平台上不同区域设置的多个压力传感器,控制器能够通过压力传感器采集到的压力数据判断板体是否处于预设位置,当板体不处于预设位置时,控制则控制驱动装置带动第一平台和放置在第一平台上的板体沿预设轨迹进行移动,从而使得板体移动至预设位置,从而能够实现对板体位置的自动校准,使得平台成为了一个可以迁移使用的设备,平台可以依靠自身调节系统完成姿态的校准,扩大了平台的使用范围。
技术特征:
1.一种板体的自动调节系统,其特征在于,包括:
2.根据权利要求1所述的板体的自动调节系统,其特征在于,
3.根据权利要求2所述的板体的自动调节系统,其特征在于,
4.根据权利要求1所述的板体的自动调节系统,其特征在于,
5.根据权利要求4所述的板体的自动调节系统,其特征在于,
6.根据权利要求5所述的板体的自动调节系统,其特征在于,
7.根据权利要求6所述的板体的自动调节系统,其特征在于,
8.根据权利要求5所述的板体的自动调节系统,其特征在于,
9.根据权利要求2所述的板体的自动调节系统,其特征在于,
10.根据权利要求1所述的板体的自动调节系统,其特征在于,
技术总结
本申请提供一种板体的自动调节系统。本申请涉及自动化技术领域。其中,板体的自动调节系统包括:第一平台,第一平台的第一表面具有多个区域,每个区域上至少设置有一个压力传感器,每个压力传感器用于感测放置在对应区域的板体的压力;第二平台,第二平台设置在第一平台背离第一表面的一侧;驱动装置,驱动装置均设置在第一平台和第二平台之间,驱动装置包括驱动件和活动块,活动块沿驱动件活动,驱动件与第二平台固定连接,活动块与第一平台固定连接;控制器,控制器分别与多个压力传感器和驱动装置连接,用于根据压力传感器感测到的对应区域的压力驱动驱动装置的活动块进行活动,以使第一平台和放置在第一平台上方的板体沿第一轨迹进行活动。
技术研发人员:黄星桦,甄畅,胡恒广,闫冬成,刘元奇,彭孟菲,高会冻,刘开怀
受保护的技术使用者:河北光兴半导体技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!