一种便捷救援机器人电源快速更换结构的制作方法
本发明涉及救援机器人领域,具体涉及一种便捷救援机器人电源快速更换结构。
背景技术:
1、随着社会经济和技术的进步,机器视觉技术已逐渐应用于各个领域中,特别是机器人技术领域内;在应急救援方面,相比于真人救援,部分复杂环境如山地、火场等,可能造成救援人员伤害,因此救援要求更高。鉴于此类情况多种多样的救援机器人被开发出来,多数救援机器人已经实现避障、现场信息采集、危险环境处理等功能。
2、目前,现有的救援机器人电源为了避免充电线的限制,通过采用蓄电池作为电源,但救援机器人行动过程中,容易产生震动,为了保证蓄电池在救援机器人上安装的稳定性,通常采用螺栓或其它固定机构对其进行固定,从而使得蓄电池在救援机器人上安装稳定牢靠,但同时导致电源在进行更换时十分繁琐,无法进行快速更换,需要消耗过多的时间,影响装置更换电池效果的问题。
3、因此,发明一种便捷救援机器人电源快速更换结构来解决上述问题很有必要。
技术实现思路
1、本发明的目的是提供一种便捷救援机器人电源快速更换结构,以解决上述背景技术中提出的电源在进行更换时十分繁琐,无法进行快速更换,需要消耗过多的时间,影响装置更换电池效果的问题。
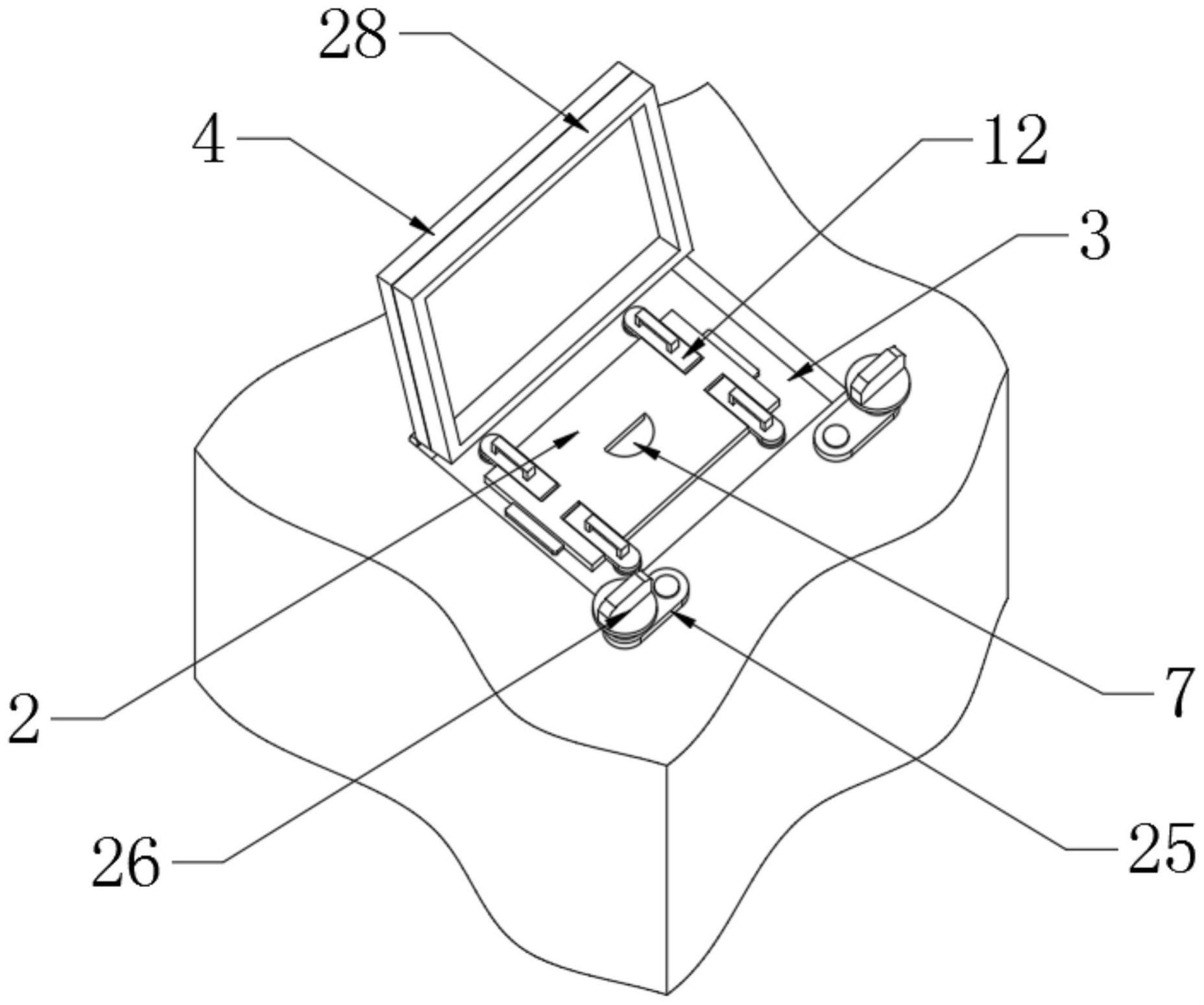
2、为了实现上述目的,本发明提供如下技术方案:一种便捷救援机器人电源快速更换结构,包括开设在机器人上的电源腔和安装在电源腔内的电源,所述电源腔的顶部端口设有盖槽,所述盖槽的尺寸大于电源腔的尺寸,所述盖槽的顶端端口设有电源盖,所述盖槽下侧壁的前后两部的左右两部均开设有安装通道,所述安装通道的内部转动嵌套有转柱,所述转柱的顶部与电源的顶部壁之间设置有第一限位组件,所述转柱的柱身与电源的侧壁之间设置有第二限位组件,所述电源的上侧中部开设有内扣槽。
3、优选的,所述第一限位组件包括滑动嵌套在转柱顶部的矩形柱和开设在电源顶部壁的第一卡槽,所述第一卡槽的数量设置有四个,四个所述第一卡槽分两组对称设置在电源顶部壁的前后边缘,所述转柱的上部柱身内开设有牵拉通道,所述矩形柱的下端延伸至牵拉通道内,所述矩形柱的底端与牵拉通道之间连接有牵拉弹簧,所述矩形柱的顶端固定有第一卡板,所述第一卡板与第一卡槽相匹配;
4、电源插入电源腔内后,向上拉动第一卡板,第一卡板拉动矩形柱,矩形柱拉动牵拉弹簧,然后转动第一卡板,将第一卡板转动到第一卡槽的上方,然后松开第一卡板,牵拉弹簧拉动矩形柱,矩形柱拉动第一卡板,使得第一卡板卡入第一卡槽内,实现对电源的固定。
5、优选的,所述第一卡板的顶部固定有拉把,所述拉把与第一卡板之间一体化加工成型,通过拉把方便作用力在第一卡板上,从而方便拉动第一卡板。
6、优选的,所述转柱的顶部开设有矩形滑道,所述矩形滑道与牵拉通道相贯通,所述牵拉通道的直径大于矩形滑道的长度,所述矩形柱滑动嵌套在矩形滑道内,所述矩形柱的侧壁与矩形滑道的侧壁相抵触,所述矩形柱的底端固定有限位盘,所述限位盘的直径大于矩形滑道的长度,所述限位盘滑动嵌套在牵拉通道内,所述牵拉弹簧的下端与牵拉通道的底部壁固定连接,所述牵拉弹簧的上端与限位盘的底部固定连接;
7、通过设置有矩形滑道和矩形柱,使得矩形柱转动时,能够同步带动转柱转动,限位盘的设置对矩形柱的底端进行限位,防止向上拉动矩形柱时矩形柱脱离矩形滑道,提高了矩形柱安装的稳定性。
8、优选的,所述电源腔前后两侧壁的上部对应安装通道的位置开设有第一容纳槽,所述电源腔前后两侧壁的下部对应安装通道的位置开设有第二容纳槽,所述第一容纳槽和第二容纳槽均与相应的安装通道相贯通,所述电源的前后两侧壁对应第一容纳槽和第二容纳槽的位置分别开设有第二卡槽和第三卡槽,所述第二限位组件包括嵌套在第一容纳槽内的第二卡板和嵌套在第二容纳槽内的第三卡板,所述第二卡板和第三卡板分别固定在相应的转柱上,所述第二卡板与第二卡槽相匹配,所述第三卡板与第三卡槽相匹配;
9、电源插入电源腔内后,第一卡板转动带动转柱转动,转柱转动带动第二卡板和第三卡板转动,第二卡板和第三卡板转动分别插入电源上的第二卡槽和第三卡槽内,从而限定住电源,防止机器人在移动过程中产生得震动导致电源在电源腔内发生移动,提高了电源安装的稳定性。
10、优选的,所述第二卡槽和第三卡槽的俯视截面均设置为扇形。
11、优选的,所述电源腔左右两侧壁均开设有限位滑道,所述限位滑道与盖槽相贯通,所述电源左右两侧壁的中部均固定有滑板,所述滑板与限位滑道相匹配,使得电源能够稳定的插入电源腔内,提高了电源在电源腔内安装的稳定性。
12、优选的,所述电源盖的后侧与盖槽端口的后侧边缘之间通过铰接相连,所述电源盖上侧前端的左右两部均开设有卡孔,所述盖槽端口前侧边缘的左右两部均转动连接有转动板,所述转动板的端头螺纹嵌套有锁紧旋钮,所述锁紧旋钮的尾端嵌套在卡孔内;
13、电源盖关闭时,移动转动板,使得转动板带有锁紧旋钮的一端置于电源盖上,同时使得锁紧旋钮的底端与卡孔对齐,转动锁紧旋钮,使得锁紧旋钮的尾端嵌套在卡孔内,能够牢靠固定住电源盖,防止机器人在移动过程中产生得震动导致电源盖打开;
14、需要打开电源盖时,反向转动锁紧旋钮,使得锁紧旋钮的尾端脱离卡孔,在转动转动板,使得转动板脱离电源盖,解除对电源盖的锁定,从而方便打开电源盖。
15、优选的,所述电源盖的上侧固定有把手,通过把手便于作用力在电源盖上,从而方便打开电源盖。
16、优选的,所述电源盖的下侧边缘固定有回形密封垫,所述回形密封垫的底部与盖槽的下侧边缘相抵触,通过回形密封垫的设置,使得电源盖关闭后,其密封性好,避免灰尘等细小杂质进入盖槽内。
17、在上述技术方案中,本发明提供的技术效果和优点:
18、1、在将救援机器人内的电源进行拆卸时,向上拉动拉把,进行水平90度转动,然后依次对其余拉把进行相应的操作,能够解除对电源的锁定,然后通过内扣槽即可将电源从电源腔内抽取,使得电源拆卸快捷方便,将新的电源插入电源腔内,再向上拉动拉把,逆向进行水平90度转动,松开拉把,然后依次对其余拉把进行相应的操作,即可对电源进行锁定,使得电源安装快捷方便,能够实现救援机器人内电源的快速更换,减小更换电源所需的时间,提高了更换电源的效率;
19、2、通过电源盖的下侧边缘固定有回形密封垫,使得电源盖关闭后,其密封性好,避免灰尘等细小杂质进入盖槽内;
20、3、通过设置有卡孔、转动板和锁紧旋钮,使得电源盖关闭时稳定性好,不易因震动而打开。
技术特征:
1.一种便捷救援机器人电源快速更换结构,包括开设在机器人上的电源腔(1)和安装在电源腔(1)内的电源(2),其特征在于:所述电源腔(1)的顶部端口设有盖槽(3),所述盖槽(3)的尺寸大于电源腔(1)的尺寸,所述盖槽(3)的顶端端口设有电源盖(4),所述盖槽(3)下侧壁的前后两部的左右两部均开设有安装通道(5),所述安装通道(5)的内部转动嵌套有转柱(6),所述转柱(6)的顶部与电源(2)的顶部壁之间设置有第一限位组件,所述转柱(6)的柱身与电源(2)的侧壁之间设置有第二限位组件,所述电源(2)的上侧中部开设有内扣槽(7)。
2.根据权利要求1所述的一种便捷救援机器人电源快速更换结构,其特征在于:所述第一限位组件包括滑动嵌套在转柱(6)顶部的矩形柱(8)和开设在电源(2)顶部壁的第一卡槽(9),所述第一卡槽(9)的数量设置有四个,四个所述第一卡槽(9)分两组对称设置在电源(2)顶部壁的前后边缘,所述转柱(6)的上部柱身内开设有牵拉通道(10),所述矩形柱(8)的下端延伸至牵拉通道(10)内,所述矩形柱(8)的底端与牵拉通道(10)之间连接有牵拉弹簧(11),所述矩形柱(8)的顶端固定有第一卡板(12),所述第一卡板(12)与第一卡槽(9)相匹配。
3.根据权利要求2所述的一种便捷救援机器人电源快速更换结构,其特征在于:所述第一卡板(12)的顶部固定有拉把(13),所述拉把(13)与第一卡板(12)之间一体化加工成型。
4.根据权利要求2所述的一种便捷救援机器人电源快速更换结构,其特征在于:所述转柱(6)的顶部开设有矩形滑道(14),所述矩形滑道(14)与牵拉通道(10)相贯通,所述牵拉通道(10)的直径大于矩形滑道(14)的长度,所述矩形柱(8)滑动嵌套在矩形滑道(14)内,所述矩形柱(8)的侧壁与矩形滑道(14)的侧壁相抵触,所述矩形柱(8)的底端固定有限位盘(15),所述限位盘(15)的直径大于矩形滑道(14)的长度,所述限位盘(15)滑动嵌套在牵拉通道(10)内,所述牵拉弹簧(11)的下端与牵拉通道(10)的底部壁固定连接,所述牵拉弹簧(11)的上端与限位盘(15)的底部固定连接。
5.根据权利要求1所述的一种便捷救援机器人电源快速更换结构,其特征在于:所述电源腔(1)前后两侧壁的上部对应安装通道(5)的位置开设有第一容纳槽(16),所述电源腔(1)前后两侧壁的下部对应安装通道(5)的位置开设有第二容纳槽(17),所述第一容纳槽(16)和第二容纳槽(17)均与相应的安装通道(5)相贯通,所述电源(2)的前后两侧壁对应第一容纳槽(16)和第二容纳槽(17)的位置分别开设有第二卡槽(18)和第三卡槽(19),所述第二限位组件包括嵌套在第一容纳槽(16)内的第二卡板(20)和嵌套在第二容纳槽(17)内的第三卡板(21),所述第二卡板(20)和第三卡板(21)分别固定在相应的转柱(6)上,所述第二卡板(20)与第二卡槽(18)相匹配,所述第三卡板(21)与第三卡槽(19)相匹配。
6.根据权利要求5所述的一种便捷救援机器人电源快速更换结构,其特征在于:所述第二卡槽(18)和第三卡槽(19)的俯视截面均设置为扇形。
7.根据权利要求1所述的一种便捷救援机器人电源快速更换结构,其特征在于:所述电源腔(1)左右两侧壁均开设有限位滑道(22),所述限位滑道(22)与盖槽(3)相贯通,所述电源(2)左右两侧壁的中部均固定有滑板(23),所述滑板(23)与限位滑道(22)相匹配。
8.根据权利要求1所述的一种便捷救援机器人电源快速更换结构,其特征在于:所述电源盖(4)的后侧与盖槽(3)端口的后侧边缘之间通过铰接相连,所述电源盖(4)上侧前端的左右两部均开设有卡孔(24),所述盖槽(3)端口前侧边缘的左右两部均转动连接有转动板(25),所述转动板(25)的端头螺纹嵌套有锁紧旋钮(26),所述锁紧旋钮(26)的尾端嵌套在卡孔(24)内。
9.根据权利要求1所述的一种便捷救援机器人电源快速更换结构,其特征在于:所述电源盖(4)的上侧固定有把手(27)。
10.根据权利要求1所述的一种便捷救援机器人电源快速更换结构,其特征在于:所述电源盖(4)的下侧边缘固定有回形密封垫(28),所述回形密封垫(28)的底部与盖槽(3)的下侧边缘相抵触。
技术总结
本发明公开了一种便捷救援机器人电源快速更换结构,涉及救援机器人领域,包括开设在机器人上的电源腔和安装在电源腔内的电源,所述电源腔的顶部端口设有盖槽,所述盖槽的顶端端口设有电源盖,所述盖槽下侧壁的前后两部的左右两部均开设有安装通道,所述安装通道的内部转动嵌套有转柱,所述转柱的顶部与电源的顶部壁之间设置有第一限位组件,所述转柱的柱身与电源的侧壁之间设置有第二限位组件,所述电源的上侧中部开设有内扣槽。本发明能够实现救援机器人内电源的快速更换,减小更换电源所需的时间,提高了更换电源的效率,且电源安装稳定牢靠,避免机器人在移动过程中产生得震动导致电源在电源腔内发生移动。
技术研发人员:朱海燕,王亚南,马唯一,黄晶晶,牟宏磊,蒙洋,孙振江,张金兰,杨萍
受保护的技术使用者:中国人民解放军总医院第一医学中心
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!