一种PolSAR与Pan影像融合的陆面小微水体提取方法与装置
本发明涉及多源遥感影像融合与地物识别领域,更确切地说,它涉及一种polsar与pan影像融合的陆面小微水体提取方法与装置。
背景技术:
1、“小微水体”一般是指分布在陆地表面的槽沟、水渠、溪流和坑塘等,其特点是面积小、数量多、流动性较差且自净能力弱,小微水体的精细制图具有重要意义。小微水体提取难度高,诸多地方自然条件较为恶劣,或勘察人员难以到达,如沼泽和湿地等。遥感手段以其成像范围大、重访周期短等优势著称,获取下垫面信息受自然条件限制少。实地测绘周期较长,而遥感成像可以做到每月甚至几天勘察一次,遥感技术逐渐成为水体提取的关键手段。
2、基于遥感技术的水体提取往往仅利用单一光学影像进行,如归一化水体指数、地表水体指数、光谱信息或空间纹理特征等,常用的分类方法包括专家解译、图像聚类、面向对象分类和决策树等。其中,研究常用的数据源为中分辨率光学遥感影像,通常为landsat和sentinel系列数据;除光学遥感影像外,星载合成孔径雷达(sar)成像过程不受气候气象条件影响,因其对介电常数和地表粗糙度的敏感性,越来越多的被运用到复杂水体的遥感识别中,也是目前水体提取和水情监测的重要技术手段。sar作为一种主动微波探测器,获取地物的后向散射信号进行成像,sar影像中水体一般呈镜像散射特征,接收器接收到的后向散射系数低,在sar影像上表现为颜色更深的黑色。然而高分辨率的遥感数据更有利于提高分类精度并且能实现进一步的小微水体提取,这时全色影像的优势也愈加明显。
3、全色影像是通过遥感技术手段获取0.4-0.7μm整个可见光范围黑白影像的统称,其入射能量大,影像空间分辨率相对较高。全极化合成孔径雷达(polsar)影像具有vv、vh、hh和hv四种极化方式,包含丰富的极化散射信息,可以更充分的体现出水体与其他地物的后向散射系数差异。目前小微水体提取研究中常用的数据源为多光谱数据、双极化sar数据等中分辨率影像,很少利用高分辨率的pan数据或全极化sar数据。光学影像受气象气候影像较大,且陆面水体与海洋在多光谱影像上较难区分。单独使用sar数据不能很好地区分水体边界或其他水生植被,中分辨率的光学影像或双极化sar影像空间细节表达能力较差,容易造成误分、错分,现有的陆面水体提取方法不能精确地反映小微水体的真实空间分布情况。
技术实现思路
1、本发明的目的是针对现有技术的不足,提出了一种polsar与pan影像融合的陆面小微水体提取方法与装置。
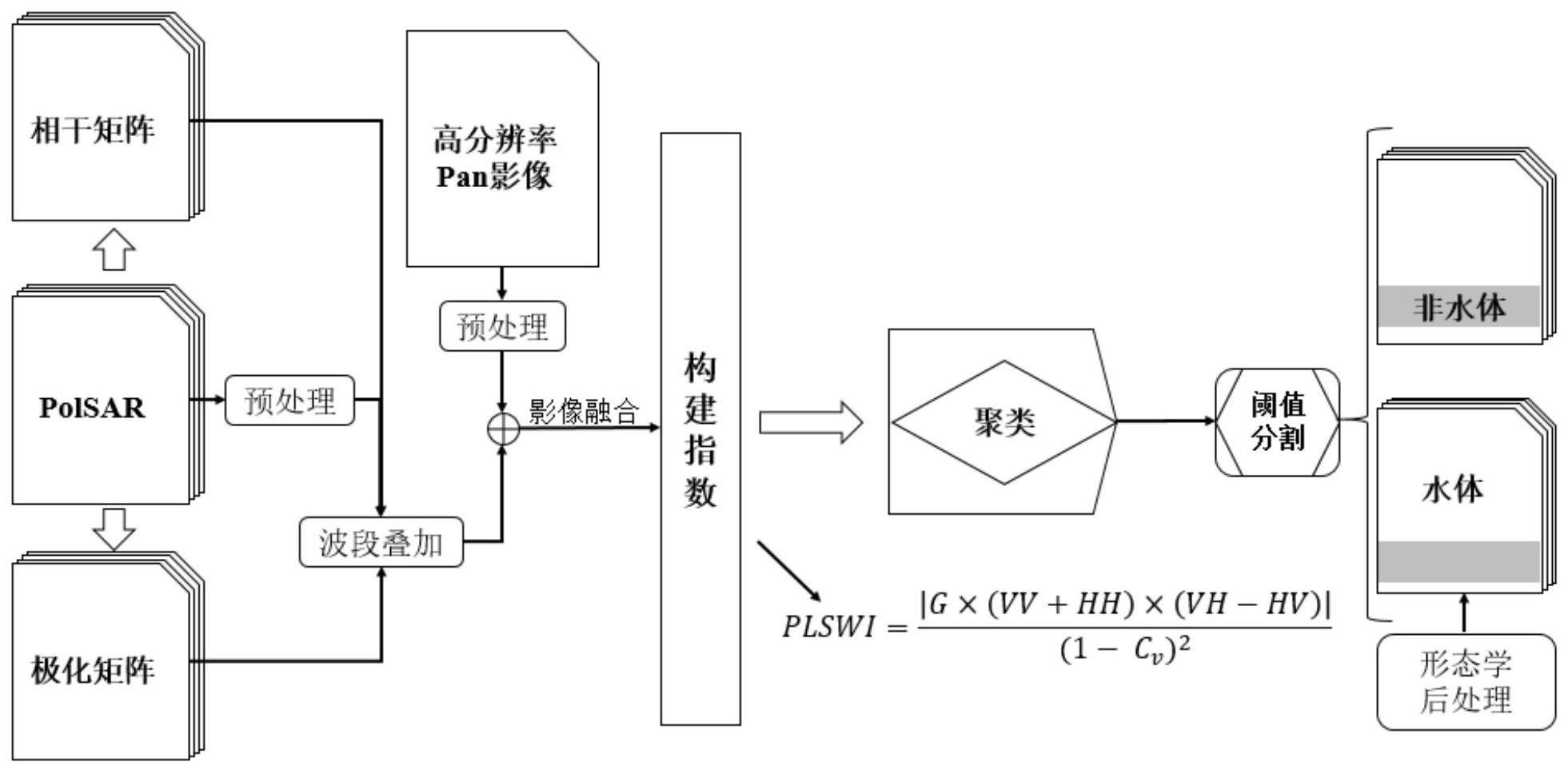
2、第一方面,提供了一种polsar与pan影像融合的陆面小微水体提取方法,包括:
3、步骤1、获取polsar影像,并进行预处理;
4、步骤2、计算预处理后polsar影像的极化相干矩阵和协方差矩阵,然后对polsar进行非相干性freeman-durden极化分解,得到镜像单次后向散射分量;
5、步骤3、获取pan影像,进行预处理,并将polsar影像与pan影像进行几何配准操作;
6、步骤4、几何配准后的polsar影像和高分辨率pan影像采用空间细节注入和后向散射信息补偿的方式进行异质影像融合,得到高空间分辨率的polsar与pan融合影像;
7、步骤5、根据实际情况对polsar与pan融合影像进行一定尺度的滑动窗口去噪;
8、步骤6、基于polsar与pan融合影像构建高分辨率polsar陆面水体指数plswi;
9、步骤7、对计算得到的polsar陆面水体指数plswi影像进行影像聚类,确定聚类中心并以此预设分割阈值,得到陆面水体初步提取结果;
10、步骤8、对陆面水体初步提取结果进行形态学后处理,得到精确陆面小微水体提取结果。
11、作为优选,步骤2包括:
12、步骤2.1、通过极化refined lee滤波对polsar影像矩阵t1进行极化去噪操作得到t2;
13、步骤2.2、处理polsar影像极化方式之间t2成分得到极化分解后的多个相干矩阵t3;
14、步骤2.3、利用非相干freeman-durden算法对去噪后的极化polsar波段进行分解:
15、
16、
17、
18、c=cs+cd+cv
19、其中,freeman-durden极化分解算法假设三个成分互不相干的情况下,总的后向散射模型为c;式中,cs、cd与cv分别为单次散射协方差矩阵、二次散射协方差矩阵与体散射平均协方差矩阵;fs、fd与fv分别为单次、二次和体散射分量;α为产生单次散射平面的地表相关参数,β为产生二次散射的两平面复介电常数之比相关参数。
20、作为优选,步骤4包括:
21、步骤4.1、对预处理后的polsar影像与pan影像进行影像归一化操作,范围为0到1的影像归一化表示为:
22、
23、其中,an表示第n个像元,影像矩阵共有n个像元;amin为影像像素中的最小值,amax为影像像素中最大值,为做完归一化的结果影像;
24、步骤4.2、以polsar影像为参考影像,对pan影像进行直方图匹配;其中,pan影像所有像素的标准差σa表示为:
25、
26、其中,表示第n个像元,表示pan影像矩阵归一化后的像元平均值,pan影像矩阵共有n个像元;
27、步骤4.3、将高分辨率pan影像的空间细节注入上采样后的polsar影像获得融合影像;
28、步骤4.4、通过计算原始低分辨率polsar影像和融合影像之间的差异,得到后向散射系数的补偿矩阵,然后对初步融合结果进行后向散射信息的补偿操作。
29、作为优选,步骤4.2中,直方图匹配后的影像矩阵由下式求得:
30、
31、其中,σa为pan影像所有像素的标准差,σs为polsar影像所有像素的标准差,表示polsar影像矩阵归一化后的平均值。
32、作为优选,步骤4.3中,空间信息和纹理细节通过高分pan影像和polsar影像的高频分量做差获得,而polsar影像的高频分量是通过空间滤波或波段线性组合的方式求得,上述过程描述为:
33、
34、其中,y为融合结果影像,fup(s)为polsar影像上采样操作,ih为polsar影像经过空间滤波或波段线性组合得到的高频空间分量,表示直方图匹配后的高分pan影像,w表示融合权重系数。
35、作为优选,步骤4.4中,信息补偿过程表示为:
36、sy=y+fup[s-fdown(fgb(y))]
37、其中,fgb(·)和fdown(·)分别表高斯模糊和下采样操作,fup为上采样操作;s是低空间分辨率的polsar影像,sy表示最终的融合影像。
38、作为优选,步骤6包括:
39、步骤6.1、对同极化vv和hh波段进行求和;
40、步骤6.2、计算相干矩阵和协方差矩阵表征后向散射信号的相干现象;步骤2.2中所得的多个相干矩阵求和并依据相干矩阵求解原理,对数值较小的相干矩阵分量放大倍,上述计算过程表示为:
41、
42、其中,gr为第r个相干矩阵,r∈[1,r];g为所有相干矩阵波段之和,是调节因子;
43、步骤6.3、通过计算(vh-hv)值,即交叉极化波段的差值,表征下垫面是否为平静的陆面水体;
44、步骤6.4、综合空间增强后的polsar影像主要极化特点,构建polsar陆面水体指数plswi公式如下:
45、
46、其中,g为各相干矩阵波段之和;vv、hh、vh和hv是polsar影像的四种极化波段;cs为极化分解后的镜像单次散射分量;plswi为polsar陆面水体指数。
47、作为优选,步骤7包括:
48、步骤7.1、定义影像域s={x1,…,xn,…xn}中含有n个像元对象,每个对象将步骤6.4计算得到的指数数值作为区分属性;影像域s中任意两个像元之间的距离表示为dt(xm,xn):
49、
50、步骤7.2、计算每一个像元距离分割中心位置k的距离均值,迭代求最优中心,即分割点:
51、
52、其中,t为迭代次数,是初始化分割中心,||·||为l2范式;dt是预设距离;
53、步骤7.3、根据迭代结果获取分割中心的plswi值,将该值进行适当缩放后确定最大阈值vmax,小于该阈值则判定为水体区域,反之为非水体区域,该过程表示为:
54、0≤rlswr(i,j)≤vmax
55、其中,vmax为水体阈值上限,rlswr(i,j)为位置(i,j)的rlswr值;若位置(i,j)处的rlswr(i,j)值满足上式,则位置(i,j)处判定为水体区域,并执行步骤8形态学处理;若位置(i,j)的rlswr(i,j)值不满足上式,则判定位置(i,j)处为非水体区域。
56、第二方面,提供了一种polsar与pan影像融合的陆面小微水体提取系统,用于执行第一方面任一所述的polsar与pan影像融合的陆面小微水体提取方法,包括:
57、第一预处理模块,用于获取polsar影像,并进行预处理;
58、计算模块,用于计算预处理后polsar影像的极化相干矩阵和协方差矩阵,然后对polsar进行非相干性freeman-durden极化分解,得到镜像单次后向散射分量;
59、第二预处理模块,用于获取pan影像,进行预处理,并将polsar影像与pan影像进行几何配准操作;
60、融合模块,用于将几何配准后的polsar影像和高分辨率pan影像采用空间细节注入和后向散射信息补偿的方式进行异质影像融合,得到高空间分辨率的polsar与pan融合影像;
61、去噪模块,用于根据实际情况对polsar与pan融合影像进行一定尺度的滑动窗口去噪;
62、构建模块,用于基于polsar与pan融合影像构建高分辨率polsar陆面水体指数plswi;
63、提取模块,用于对计算得到的polsar陆面水体指数plswi影像进行影像聚类,确定聚类中心并以此预设分割阈值,得到陆面水体初步提取结果;
64、处理模块,用于对陆面水体初步提取结果进行形态学后处理,得到精确陆面小微水体提取结果。
65、第三方面,提供了一种计算机存储介质,所述计算机存储介质内存储有计算机程序;所述计算机程序在计算机上运行时,使得计算机执行第一方面任一所述的polsar与pan影像融合的陆面小微水体提取方法。
66、本发明的有益效果是:本发明首先融合polsar和高分辨率pan影像,再构建陆面水体指数增大水体与非水体区域的差异,然后进行影像聚类,获取水体雨非水体的二分阈值,最后结合形态学后处理去除因sar影像相干斑噪声而产生的误分像素,实现了陆面小微水体的精细提取。本发明与装置更容易实现且提取精度较高,是对现有水体提取方法的有益补充,可以更好的剔除海面水体,因此具有重要的实际应用意义。
- 还没有人留言评论。精彩留言会获得点赞!