一种医用直线加速器束流靶点位置调控方法及装置与流程
本发明涉及放疗设备,具体的涉及一种医用直线加速器束流靶点位置调控方法及装置。
背景技术:
1、医用直线加速器,采用电子轰击靶材,产生x射线,用于临床肿瘤放射治疗。医用直线加速器等中心治疗,辐射束轴相对于等中心点的最大偏移不能大于2mm。束流组件安装到加速器云台后,若束流靶点位置没有与加速器云台射线出口中心对准或辐射束轴角度偏移过大,则无法满足加速器等中心精准治疗的要求,需要对束流靶点位置进行调控。同时,束流组件很重,若束流靶点位置调控没有合适方法,需要反复多次才能达到预期效果。
2、现有束流靶点位置调控存在以下问题:
3、(1)束流靶点位置调控多依靠手动校准,调控多凭手感与经验,缺乏量化的调控方法,调试周期长,调控效果差。
4、(2)束流靶点位置调控结构可操作性不强,需要耗费较多时间与精力。
5、(3)水平方向调控时,各方向之间相互影响,靶点位置在某一方向移动时,会对另一方向造成影响,导致另一方向的位置发生偏移,需要反复校正。
6、(4)束流组件质量较大,随机架运动后,辐射束轴相对等中心容易发生偏移,需要定期检查,若有偏移,需要反复校准。
7、有鉴于此,特提出本发明专利。
技术实现思路
1、为了解决上述技术问题,本发明提供一种医用直线加速器束流靶点位置调控方法及调控装置,调控方法通过检测获取医用直线加速器当前束流靶点位置与目标靶点位置之间的偏差,计算出医用直线加速器束流靶点位置的调控参数,调控装置按照所述调控方法实现医用直线加速器束流靶点的自适应调控。
2、具体地,采用了如下技术方案:
3、一种医用直线加速器束流靶点位置调控方法,包括:
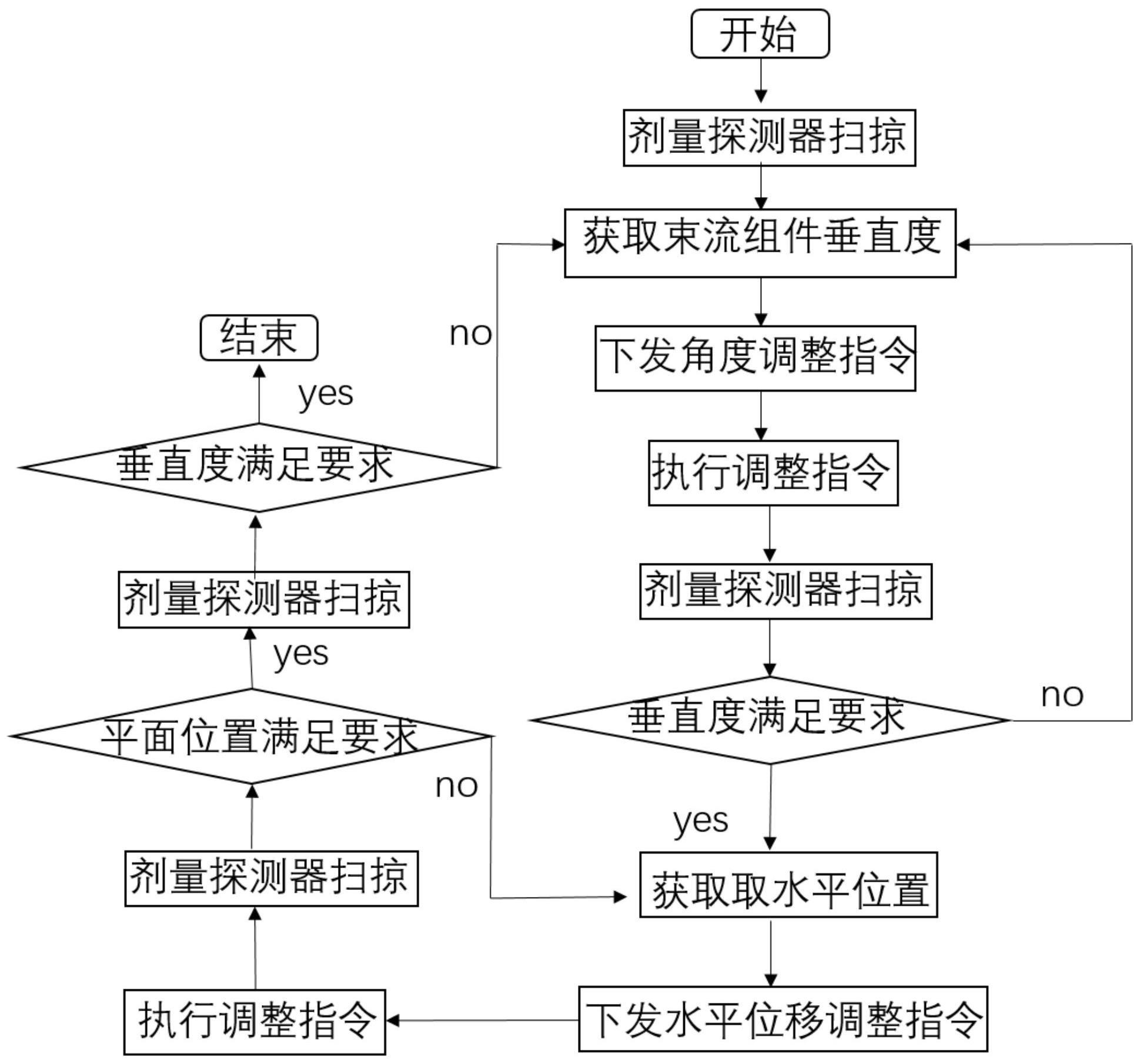
4、针对束流组件进行垂直度调控:以等中心作为空间坐标原点建立空间坐标系,确定辐射束轴直线在空间坐标系中的拟合函数,根据辐射束轴直线的拟合函数确定辐射束轴与x0y平面的夹角θ,根据所述夹角θ调控束流组件的垂直度;
5、针对束流组件进行水平位置调控:扫描等中心平面获取辐射束的射野中心位置,确定辐射束的射野中心相对等中心在x0y平面上的偏移量δl,将其分解到x、y方向,判断辐射束轴在x轴、y轴的偏移量δx、δy,根据所述偏移量δx、δy调控束流组件的水平位置;
6、所述束流组件调控完成之后,扫描调控后的束流组件发射的辐射束,校验辐射束轴垂直度以及辐射束的射野中心与等中心的重合度是否满足预设要求,若满足,则束流靶点位置调控完毕;若不满足,则针对束流组件继续进行垂直度调控和水平位置调控,直至满足校验的预设要求。
7、作为本发明的可选实施方式,本发明的一种医用直线加速器束流靶点位置调控方法中,所述针对束流组件进行垂直度调控中以等中心作为空间坐标原点建立空间坐标系,确定辐射束轴直线在空间坐标系中的拟合函数包括:
8、以等中心作为空间坐标原点建立空间坐标系;
9、控制剂量探测器沿z轴方向运动扫描获取辐射束在z轴方向不同深度z1…zn的辐射中心位置散列值记为{z1(x1,y1)…zi(xi,yi)…zn(xn,yn)};
10、假设辐射束轴直线的拟合函数设为:ax+by+cz+d=0;
11、得到各辐射中心位置距目标束轴直线距离平方和q:
12、
13、其中:δi——不同源-皮距的影响因子,越逼近等中心平面,δi越高;
14、偏导求解极小值:
15、
16、
17、
18、
19、计算得到辐射束轴直线的拟合函数中a、b、c、d的值,最终确定辐射束轴直线的拟合函数。
20、作为本发明的可选实施方式,本发明的一种医用直线加速器束流靶点位置调控方法中,所述针对束流组件进行垂直度调控中根据所述夹角θ调控束流组件的垂直度包括:
21、将所述夹角θ分别投影到x0z平面得夹角θx0z,投影到y0z平面得夹角θy0z;
22、计算所述束流组件在x轴方向上的理论调控距离分别为:
23、仰角方向:dy0z仰=-r.cosθy0z
24、俯角方向:dy0z俯=+r.cosθy0z
25、计算所述束流组件在y轴方向上的理论调控距离分别为:
26、仰角方向:dx0z仰=-r.cosθx0z
27、俯角方向:dx0z俯=+r.cosθx0z
28、其中:
29、+/-——表示束流组件在z轴的运动方向;
30、r——束流组件的垂直度调控平面圆周的半径。
31、作为本发明的可选实施方式,本发明的一种医用直线加速器束流靶点位置调控方法中,所述针对束流组件进行垂直度调控包括:
32、根据计算得到的束流组件在x轴方向上的理论调控距离dy0z仰、dy0z俯确定束流组件在x轴方向上的实际调控距离为k*dy0z仰,k*dy0z俯;
33、根据计算得到的束流组件在y轴方向上的理论调控距离dx0z仰、dx0z俯确定束流组件在y轴方向上的实际调控距离为k*dx0z仰、k*dx0z俯;
34、其中,所述的k为预设值,0<k<1。
35、作为本发明的可选实施方式,本发明的一种医用直线加速器束流靶点位置调控方法中,所述针对束流组件进行水平位置调控中根据所述偏移量δx、δy调控束流组件的水平位置包括:
36、根据所述辐射束的射野中心相对等中心在x0y平面上的偏移方向,确定束流组件在x0y平面上的调节方向;
37、根据所述偏移量δx、δy确定束流组件在x轴、y轴方向上的调控量分别为k*δx、k*δy。
38、本发明同时提供一种实现所述医用直线加速器束流靶点位置调控方法的调控装置,包括:
39、束流组件;
40、垂直度调控座,所述的束流组件安装在垂直度调控座上;
41、x向调控座,所述的垂直度调控座安装在所述x向调控座上;
42、z向调控机构,安装在所述垂直度调控座上,通过所述z向调控机构调节所述垂直度调控座相对于x向调控座之间呈夹角θ,实现束流组件的垂直度调控;
43、y向调控座,所述的x向调控座沿x轴方向可滑动的安装在所述y向调控座上;
44、x向调控机构,安装在所述y向调控座上,通过x向调控机构y根据所述偏移量δx调节所述x向调控座;
45、加速器云台,所述的y向调控座沿y轴方向可滑动的安装在所述加速器云台上;
46、y向调控机构,安装在所述加速器云台上,通过y向调控机构y根据所述偏移量δy调节所述y向调控座;
47、通过所述x向调控机构、y向调控机构实现束流组件的水平位置调节。
48、作为本发明的可选实施方式,本发明的一种调控装置,所述的加速器云台包括环形云台,所述的y向调控座为与所述环形云台相适配的环状盘结构,y向调控座上沿y轴方向直径的两端分别设置y向螺纹孔和y向滑块,所述环形云台上设置y向滑槽,所述的y向调控座安装在所述环形云台,所述的y向滑块可滑动的设置在y向滑槽内;
49、所述的y向调控机构包括y向驱动电机和y向丝杆,所述的y向驱动电机固定安装在所述环形云台上,所述的y向丝杆与y向驱动电机的电机轴连接,所述的y向丝杆与所述y向调控座的y向螺纹孔螺纹连接。
50、作为本发明的可选实施方式,所述的x向调控座为与所述y向调控座相适配的环状盘结构,x向调控座上沿x轴方向直径的两端分别设置x向螺纹孔和x向滑块,所述y向调控座上设置x向滑槽,所述的x向调控座安装在所述y向调控座上,所述的x向滑块可滑动的设置在x向滑槽内;
51、所述的x向调控机构包括x向驱动电机和x向丝杆,所述的x向驱动电机固定安装在所述y向调控座上,所述的x向丝杆与x向驱动电机的电机轴连接,所述的x向丝杆与所述x向调控座的x向螺纹孔螺纹连接。
52、作为本发明的可选实施方式,所述的垂直度调控座为与所述x向调控座相适配的环状盘结构,所述的束流组件安装在垂直度调控座的上部;
53、所述的z向调控机构包括xoz平面倾角调节组件和yoz平面倾角调节组件:
54、所述的xoz平面倾角调节组件包括第一电机、第一顶丝、第二电机和第二顶丝,所述的第一顶丝与第一电机的电机轴连接,所述第二顶丝与第二电机的电机轴连接,所述的第一电机安装在垂直度调控座的x轴方向直径一端,所述第一顶丝穿过所述垂直度调控座抵接在所述x向调控座上,所述的第二电机安装在垂直度调控座的x轴方向直径另一端,所述第二顶丝穿过所述垂直度调控座抵接在所述x向调控座上;
55、所述的yoz平面倾角调节组件包括第三电机、第三顶丝、第四电机和第四顶丝,所述的第三顶丝与第三电机的电机轴连接,所述第四顶丝与第四电机的电机轴连接,所述的第三电机安装在垂直度调控座的y轴方向直径一端,所述第三顶丝穿过所述垂直度调控座抵接在所述x向调控座上,所述的第四电机安装在垂直度调控座的y轴方向直径另一端,所述第四顶丝穿过所述垂直度调控座抵接在所述x向调控座上。
56、作为本发明的可选实施方式,本发明的一种调控装置,包括螺钉防松环,所述垂直度调控座、x向调控座、y向调控座的周向上分别设置多个安装孔,多个连接螺栓的螺纹柱依次贯穿所述垂直度调控座、x向调控座、y向调控座上的安装孔紧固在所述环形云台上,所述安装孔的内径大于所述连接螺栓的螺纹柱外径,所述的螺钉防松环套装在所述连接螺栓的螺帽外周,锁紧螺钉沿径向贯穿所述螺钉防松环抵接在所述连接螺栓的螺帽上,锁紧顶丝沿轴向贯穿所述螺钉防松环抵接在所述垂直度调控座上。
57、与现有技术相比,本发明的有益效果:
58、本发明的一种医用直线加速器束流靶点位置调控方法,束流组件靶点调控结合束流剂量监测设备,精确测量束流靶点位置偏差后,自动进行靶点位置调节,主要优势包括:
59、(1)可以完全由计算机控制手段进行调控,与人工调控方式相比,避免了多方因素带来的误差,调试精准更高,调控周期更短,更安全。
60、(2)辐射束轴垂直度调控、水平位置调控互不干涉,平面正交方向之间的调控相互不干涉,不会造成在进行某个方向调控的过程中引起另一个方向位置的偏移。
61、(3)量化调控方式,使束流靶点位置调控更具精准可靠,束流靶点位置调控可操作性强,调节过程更加简单高效。
62、本实施例的调控装置,通过z向调控机构实现束流组件的垂直度调控,通过x向调控机构、x向调控机构实现束流组件的水平位置调节,从而实现束流靶点位置的自动调控,具有如下优点:
63、(1)束流组件垂直度调控与靶点水平方向调控互不影响。
64、(2)水平x轴方向调控、水平y轴方向调控互不影响。
65、(3)z向调控机构、x向调控机构、x向调控机构可分别独立驱动,实现对束流组件的调控。
66、(4)增加了连接螺栓的螺钉防松环,减少后期束流组件随加速器云台转动后位置发生偏移的风险,避免后期因连接螺栓松动造成的束流组件位置的重新校正。
- 还没有人留言评论。精彩留言会获得点赞!